






引言:
因为近期在研究扫地机的匹配算法,所有用到了CPD算法,但是CPD算法在我们的项目中总会出错,但是我们对于出错的原因并不是很了解,于是便开启看源码的坑。。。
一. CPD代码的整个调用框架
CPD算法按照论文中的算法流程(rigid的情况):
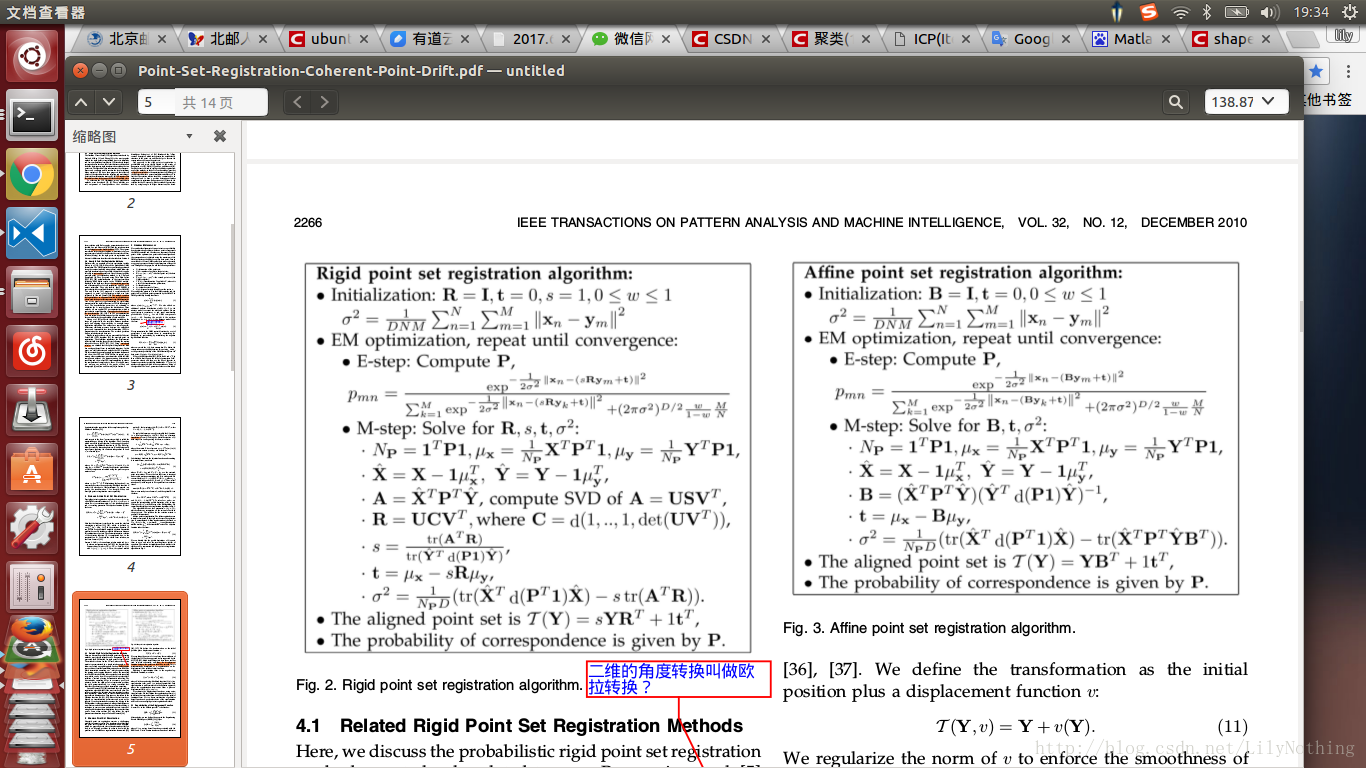
如上图的左边的算法流程所示,接下来记录的也是针对左边的算法流程。
整个CPD的调用是采用matlab来调用C语言的代码。主要的实现实在cpd_rigid.m这个文件里。但是因为会涉及到一些参数的设置,所有一般是采用cpd_register.m来调用cpd_rigid这个函数的。
二. 各个函数的具体实现和调用
以下是cpd_register的定义:
function [Transform, C,sigma2]=cpd_register(X,Y, opt)
%这其中省略了大部分参数的判断
%%%% Choose the method and start CPD point-set registration
switch lower(opt.method)
case 'rigid'%
[C, R, t, s, sigma2, iter, T]=cpd_rigid(X,Y, opt.rot, opt.scale, opt.max_it, opt.tol, opt.viz, opt.outliers, opt.fgt, opt.corresp, opt.sigma2);
%省略了其它的case
endcpd_register的定义,其中的Transform就是两个点集之间匹配之后的旋转和平移矩阵。C是X中Y的对应点,就是Y= X(C,:),所以C的长度应该和Y的行数相等,sigma2表示的是目前两个点集的距离的平方和。在我们的工程中使用这个函数的情况如下:
opt.method='rigid'; % use rigid registration
opt.viz=0; % show every iteration
opt.outliers=0.6; % use 0.6 noise weight
opt.normalize=0; % normalize to unit variance and zero mean before registering (default)
opt.scale=1; % estimate global scaling too (default)
opt.rot=1; % estimate strictly rotational matrix (default)
opt.corresp=1; % compute correspondence vector at the end of registration (not being estimated by default)
opt.max_it=100; % max number of iterations
opt.tol=1e-8; % tolerance
%以上是参数的设置:
[Transform, C,sigma2] = cpd_register(X,Y, opt);
%X,Y是两个二维点集,其中X是不动的点集,Y是待匹配的点集(需要移动)
因此调用之前需要先设定参数。
在cpd_register中调用了cpd_rigid这个函数。传入的参数也是X,Y点集和一些参数。cpd_rigid这个函数里面调用了C语言实现的部分代码。实现CPD的整个算法流程主要是cpd_rigid这个函数。
function [C, R, t, s, sigma2, iter, T]=cpd_rigid(X,Y, rot, scale, max_it, tol, viz, outliers, fgt, corresp, sigma2)
[N, D]=size(X);
[M, D]=size(Y);
if viz, figure; end;
% Initialization
if ~exist('sigma2','var') || isempty(sigma2) || (sigma2==0)
sigma2=(M*trace(X'*X)+N*trace(Y'*Y)-2*sum(X)*sum(Y)')/(M*N*D);
end
%'流程开始
sigma2_init=sigma2;
T=Y; s=1; R=eye(D);
% Optimization
iter=0; ntol=tol+10; L=0;
while (iter<max_it) && (ntol > tol) && (sigma2 > 10*eps)
L_old=L;
% Check wheather we want to use the Fast Gauss Transform
if (fgt==0) % no FGT
%E step
[P1,Pt1, PX, L]=cpd_P(X,T, sigma2 ,outliers); st='';
else % FGT
[P1, Pt1, PX, L, sigma2, st]=cpd_Pfast(X, T, sigma2, outliers, sigma2_init, fgt);
end
ntol=abs((L-L_old)/L);
disp([' CPD Rigid ' st ' : dL= ' num2str(ntol) ', iter= ' num2str(iter) ' sigma2= ' num2str(sigma2) ' Lost= ' num2str(L)]);
Np=sum(Pt1);% all pmn
mu_x=X'*Pt1/Np;
mu_y=Y'*P1/Np;
% Solve for Rotation, scaling, translation and sigma^2
A=PX'*Y-Np*(mu_x*mu_y'); % A= X'P'*Y-X'P'1*1'P'Y/Np;
[U,S,V]=svd(A); C=eye(D);
if rot, C(end,end)=det(U*V'); end % check if we need strictly rotation (no reflections)
R=U*C*V';
sigma2save=sigma2;
scale = 0;
if scale % check if estimating scaling as well, otherwise s=1
s=trace(S*C)/(sum(sum(Y.^2.*repmat(P1,1,D))) - Np*(mu_y'*mu_y));
sigma2=abs(sum(sum(X.^2.*repmat(Pt1,1,D))) - Np*(mu_x'*mu_x) -s*trace(S*C))/(Np*D);
else
sigma2=abs((sum(sum(X.^2.*repmat(Pt1,1,D))) - Np*(mu_x'*mu_x)+sum(sum(Y.^2.*repmat(P1,1,D))) - Np*(mu_y'*mu_y) -2*trace(S*C))/(Np*D));
end
t=mu_x-s*R*mu_y;
% Update the GMM centroids
T=s*Y*R'+repmat(t',[M 1]);
iter=iter+1;
if viz, cpd_plot_iter(X, T); end; % show current iteration if viz=1
end
% Find the correspondence, such that Y corresponds to X(C,:)
%corresp = 0;
if corresp, C=cpd_Pcorrespondence(X,T,sigma2save,outliers); else C=0; end;由以上的代码可以知道,当FGT库不使用的时候,调用的是cpd_P.c这个C语言的代码。这个cpd_P.c函数实现的就是计算算法流程中的Pmn这个概率1值(所有的概率值都是基于距离来进行计算的)。在该算法中涉及到的主要三个输出参数是Pt1,P1,Px,这三个参数分别对应着概率值P(x|m),P(m|x),而Px就是P1乘以X的坐标。也就是论文中对应的先验概率和后验概率之间的转换。
下面贴出cpd_P.c 的源码:里面会有一些注释
主要实现计算的是里面的cpd_comp这个函数。
void cpd_comp(
double* x,
double* y,
double* sigma2,
double* outlier,
double* P1,
double* Pt1,
double* Px,
double* E,
int N,
int M,
int D
)
{
int n, m, d;
double ksig, diff, razn, outlier_tmp, sp;
double *P, *temp_x;
P = (double*) calloc(M, sizeof(double));// get the Y memory
temp_x = (double*) calloc(D, sizeof(double));//get a point memory
ksig = -2.0 * *sigma2;
outlier_tmp=(*outlier*M*pow (-ksig*3.14159265358979,0.5*D))/((1-*outlier)*N);
/* printf ("ksig = %lf\n", *sigma2);*/
/* outlier_tmp=*outlier*N/(1- *outlier)/M*(-ksig*3.14159265358979); */
//pow(x,y) = x^y
for (n=0; n < N; n++) {//the number of X
sp=0;
for (m=0; m < M; m++) {//the number of Y
razn=0;
for (d=0; d < D; d++) {//the dimi of point
diff=*(x+n+d*N)-*(y+m+d*M); diff=diff*diff;
razn+=diff;
}
*(P+m)=exp(razn/ksig);//第p+m个点存储的就是第n个点到第m个点的e的距离,每次n变化的时候都会被更改,razn越大,sp越小
sp+=*(P+m);
}//sp计算一个x点到所有y点的欧式距离的指数之和
sp+=outlier_tmp;//此刻的sp中存储的是第n点到Y中所有的点的距离之和,就是计算出这个两个点集之间的噪声点
*(Pt1+n)=1-outlier_tmp/ sp;
//Pt1表示的是每个x点距离y中所有点的距离的一个转换,距离越远(sp越小),这个Pt1的值越小
for (d=0; d < D; d++) {
*(temp_x+d)=*(x+n+d*N)/ sp;
}
for (m=0; m < M; m++) {
*(P1+m)+=*(P+m)/ sp;//P1里面存储的是X中第n个点到Y中第m个点的距离。其实P1中存储的就是y中每个点到x中每个点的距离之后除以
//上式表示的是当前的Y点到x点的距离在所有x点到Y点中的距离的比重。就是求出这个高斯模型中心的概率。这个概率会累加
for (d=0; d < D; d++) {
*(Px+m+d*M)+= *(temp_x+d)**(P+m);//这里表示对于一个x点(x1,x2),分别乘以x到y1,y2,y3的距离的负指数,如果距离远,那么得到的值就越小
//其实px就是存储的是Y中的一个点到X中的所有点的距离的负指数之和,也就是对应着GMM中是由这个中心点生成这些数据的概率
}
}
*E += -log(sp);
}
*E +=D*N*log(*sigma2)/2;
free((void*)P);
free((void*)temp_x);
return;
}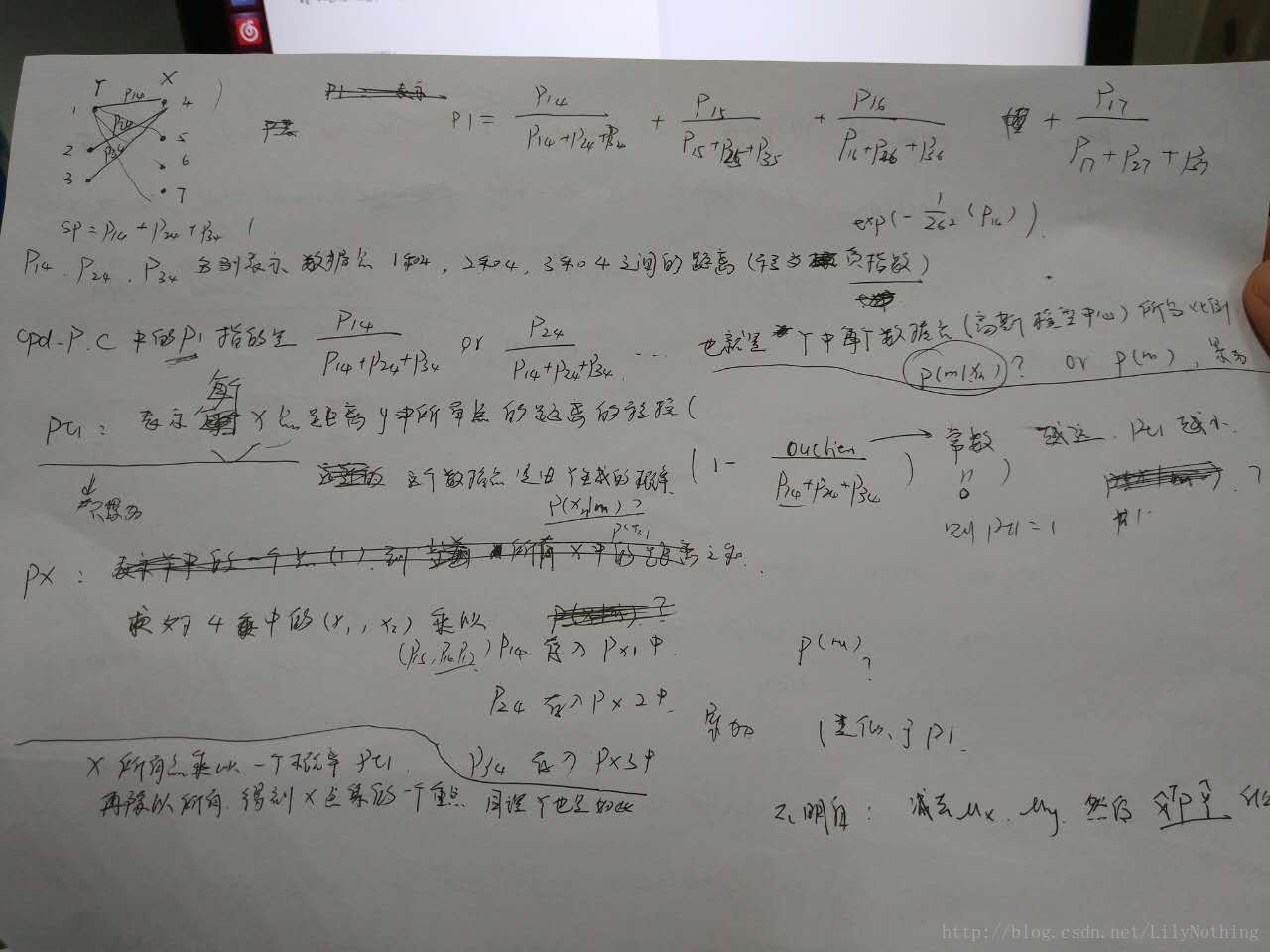
上面这个图比较乱,不过先贴上,有时间再来重新整理一下。这个图里面是拿Y等于3个点,X等于4个点的情况来进行考虑。然后一一走一遍cpd_P.c这个代码流程,得出Pt1,P1,Px的值。
由于自己的知识范围有限,可能一些知识理解的不是很清楚,希望大家帮忙更好的解答!先谢谢啦!
关于CPD,个人的理解就是考虑全部的数据点,不仅仅是考虑单独的某个点距离最近就可以了,而是考虑那些远距离的点对整体的一个影响。通过求correspondence这个信息,得出了一些以下的实验结果来验证CPD是和距离相关的:
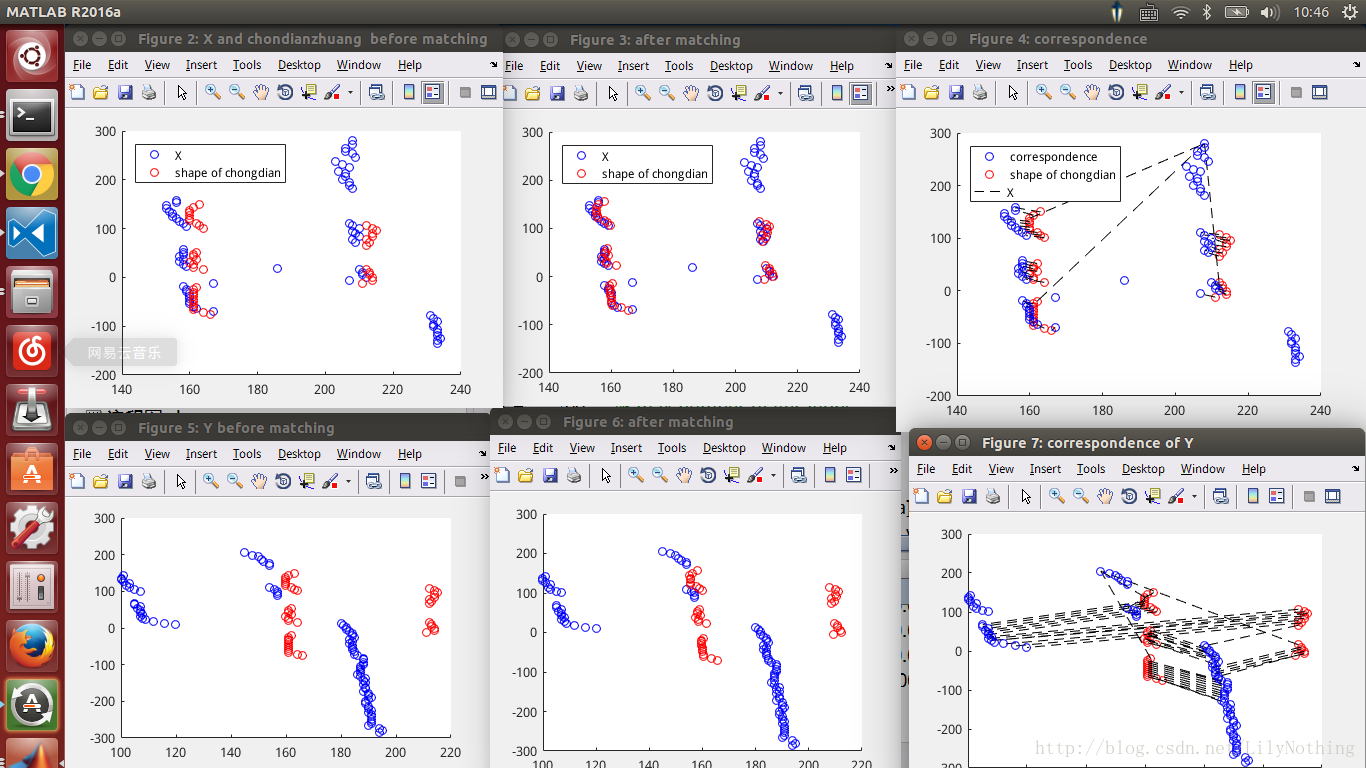
如上图所示,对于上一排的三幅图片,分别是匹配之前,匹配之后,求出correspondence之后的效果图。上面的两个点集分布比较均匀,在那个特殊形状的上下分布的数据点比较均匀。求出的correspondence也是比较准确的,但是对于X中的第一个点,都会指向Y中的某个点,虽然这是多对一的情况,但是这个问题一直没想通为啥?(求解释–)
下面一排的三幅图就是数据点分布不均匀的情况。这种情况下匹配效果较差,但是找到的correspondence还是整体距离之和较小的。

















 848
848







 到【灌水乐园】发言
到【灌水乐园】发言







