







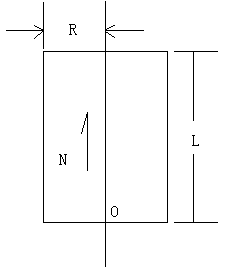
Point In Cylinder
Point : P
Cylinder: |(P – O) - ((P – O) • N) * N | <= R
0 <= (P – O)• N <= L
Structure: { V3d O;
float R;
V3d N;
FloatL; }
V = P – O;
dp = V • N;
if ( dp < 0 || dp > L ) return Outside;
T = V –dp * N;
if ( T^2 > R^2 ) return Outside;
return Inside;
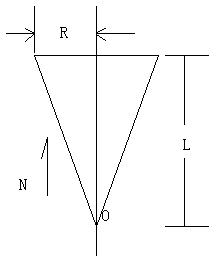
Point In Cone
Point : P
Cone : |(P – O) – ((P – O) • N) * N| <= ((P – O) • N) * R / L
0 <= (P – O)• N <= L
The Data Structure of Cone is same as Cylinder.
V = P – O;
dp = V • N;
if ( dp < 0 || dp > L ) return Outside;
T = V –dp * N;
r = dp * R / L
if ( T^2 > r^2 ) return Outside;
return Inside;
Sphere & Cylinder
Sphere : | P – C | <= r
Cylinder: |(P – O) - ((P – O) • N) * N | <= R
0 <= (P – O)• N <= L
OC = C – O;
dp = OC • N
if ( (dp > L + r) || (dp < -r) ) return No Intersection;
T = OC - dp * N;
if ( dp > L )
{
f = sqrt( r^2 – (dp - L)^2 );
if ( T^2 > (R + f)^2 ) return No Intersection;
return Intersectant;
}
else if ( dp >= 0 )
{
if ( T^2 > (R + r)^2 ) return No Intersection;
return Intersectant;
}
else
{
f = sqrt( r^2 – dp^2 );
if ( T^2 > (R + f)^2 ) return No Intersection;
return Intersectant;
}
Line Segment & Cylinder
Line Seg: P = P0 + t * V t ∈ [0, 1]
Cylinder: |(P – O) - ((P – O) • N) * N | <= R
0 <= (P – O)• N <= L
OP = P – O = P0 + t * V – O = (P0 – O) + t * V;
dp = OP • N
dp0 = (P0 – O)• N t = 0
if ( dp0 > L ) return No Intersection;
dp1 = (P0 – O + V)• N t = 1
if ( dp1 < 0 ) return No Intersection;
|(P0 – O) + t * V – (((P0 – O) + t * V) • N) * N | <= R
|(P0 – O) + t * V – ((P0 – O) • N) * N – ((t * V) • N) * N | <= R
|(P0 – O) – ((P0 – O) • N) * N + t * V - t * (V • N) * N | <= R
|((P0 – O) – ((P0 – O) • N) * N) + t * (V - (V • N) * N) | <= R
F = (P0 – O) – ((P0 – O) • N) * N;
G = V - (V • N) * N;
G^2 * t^2 + 2 * (F • G) * t + F^2 – R^2 = 0;
A = G^2;
B = 2 * (F • G);
C = F^2 – R^2;
if ( A > 0 ) //V is not parallel to N
{
Δ= B^2 – 4AC;
if ( Δ < 0 ) return No Intersection;
t = (-B ± sqrt(B^2 – 4AC)) / 2A;
t1 <= t2;
if ( t2 < 0 || t1 > 1 ) return No Intersection;
return Intersectant;
}
if ( C <= 0 ) return Intersectant;
return No Intersection;















 1013
1013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









