







在三维重建的过程中每次只能测量有限的区域,那么拼接的操作就再所难免了,最终拼接的效果往往觉得了你做的产品是否真的有价值。很多市面上的产品在比较的时候首先看的是整体的重建效果,而整体的效果就是拼接决定的。拼接的效果由精度和效率决定的,首先是精度主要看最终拼接的点云之间融合的好坏,其次的效率,效率主要考察的是在拼接的过程是否流畅,是否需要很多标记点,好的拼接效率就是在使用少量的标记点也能拼接出高精度的效果。
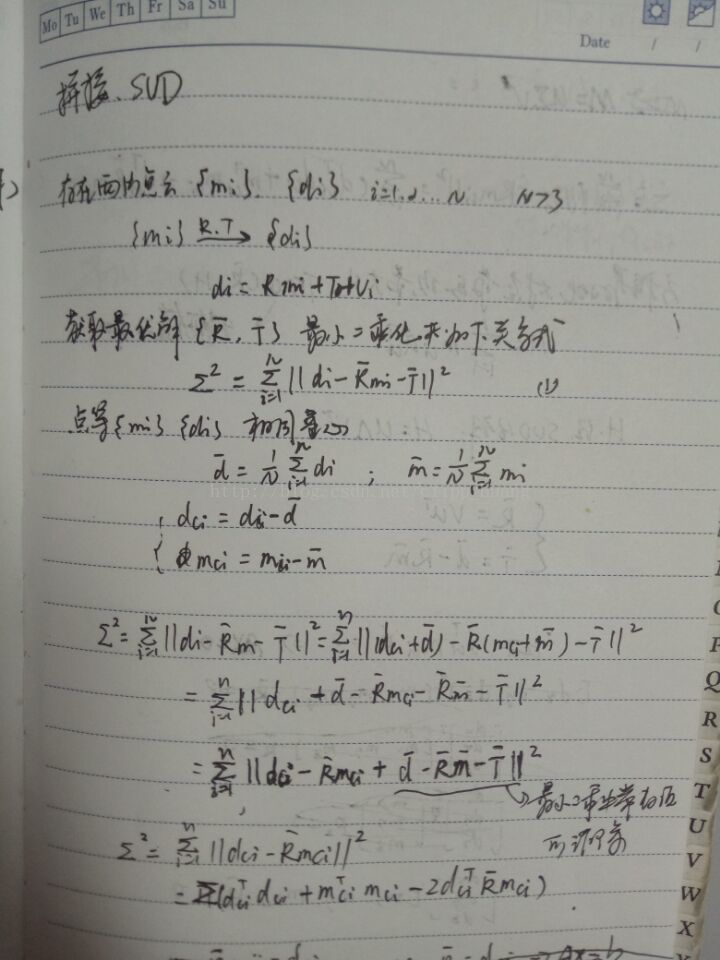
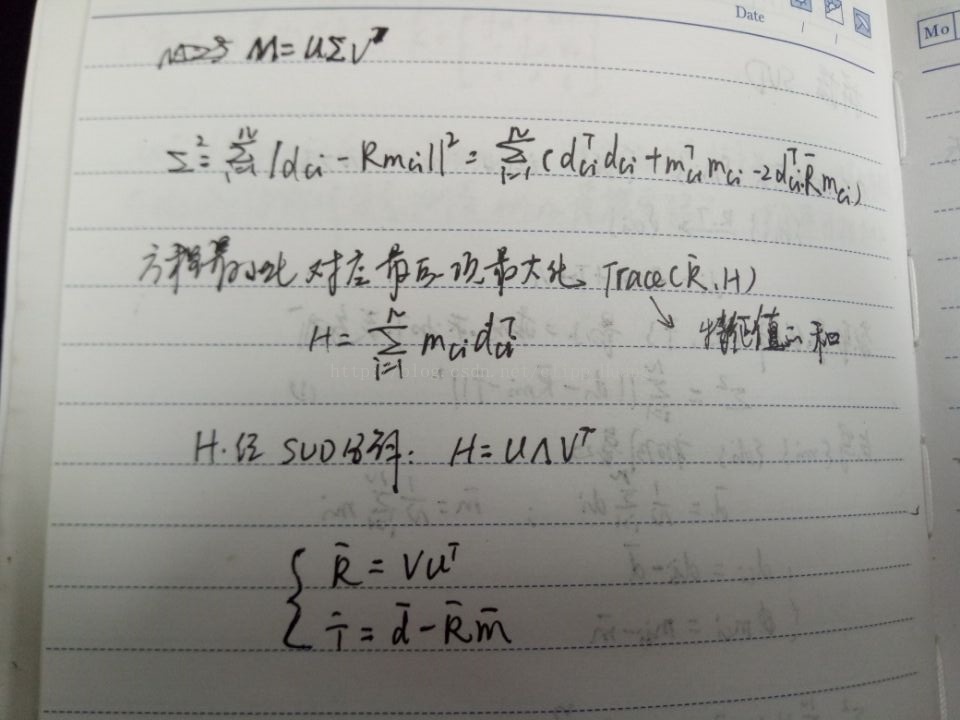
拼接的精度是由你使用的算法决定的,拼接的终极思想就是计算出两幅点云的[R,T],其中最方法很多,我介绍的是基于SVD分解的方式,敲公式太麻烦了,还是手写的吧!!
CalcRalteR_T(_vPoint3 &vPtsA,_vPoint3 &vPtsB,CvMat *&matR,CvMat *&matT)
{
CExternalLibrary Clapack;
int i,j;
VECTOR3 meanA;
meanA.x=0;
meanA.y=0;
meanA.z=0;
for (i=0;i<vPtsA.size();i++)
{
meanA+=vPtsA[i];
}
meanA=meanA/vPtsA.size()
VECTOR3 meanB;
meanB.x=0;
meanB.y=0;
meanB.z=0;
for (j=0;j<vPtsB.size();j++)
{
meanB+=vPtsB[j];
}
meanB=meanB/vPtsB.size();
_vVector3 substractmeanA;
_vVector3 substractmeanB;
for (int m=0;m<vPtsA.size();m++)
{
VECTOR3 result=vPtsA[m]-meanA;
substractmeanA.push_back(result);
}
for (int n=0;n<vPtsB.size();n++)
{
VECTOR3 result=vPtsB[n]-meanB;
substractmeanB.push_back(result);
}
float matData[9];
for (int ii=0;ii<9;ii++)
{
matData[ii]=0.0f;
}
float matData1[3];
for (int jj=0;jj<3;jj++)
{
matData1[jj]=0.0f;
}
CvMat matTet=cvMat(3,3,CV_32FC1,matData);
//matR=cvCreateMat(3,3,CV_32FC1);
CvMat *matTet1=cvCreateMat(3,3,CV_32FC1);
for (i=0;i<3;i++)
{
for (j=0;j<3;j++)
{
cvSetReal2D(matTet1,i,j,0);
}
}
CvMat matA1,matB1,*matB1Transpose;
matB1Transpose=cvCreateMat(3,1,CV_32FC1);
for (i=0;i<vPtsA.size();i++)
{
float b1[3]={substractmeanB[i].x,substractmeanB[i].y,substractmeanB[i].z};
float a1[3]={substractmeanA[i].x,substractmeanA[i].y,substractmeanA[i].z};
matB1=cvMat(1,3,CV_32FC1,b1);
matA1=cvMat(1,3,CV_32FC1,a1);
}
cvReleaseMat(&matB1Transpose);
CvMat *matW,*matU,*matV;
matW=cvCreateMat(3,1,CV_32FC1);
matU=cvCreateMat(3,3,CV_32FC1);
matV=cvCreateMat(3,3,CV_32FC1)
CvMat *matX;
CvMat *matUTranspose;
matX=cvCreateMat(3,3,CV_32FC1);
matUTranspose=cvCreateMat(3,3,CV_32FC1);
//matT=cvCreateMat(1,3,CV_32FC1);
cvSub(&matMeanA,matBMeanMulMatR,matT);
cvReleaseMat(&matW);
cvReleaseMat(&matU);
cvReleaseMat(&matV);
cvReleaseMat(&matBMeanMulMatR);
cvReleaseMat(&matUTranspose);
cvReleaseMat(&matTet1);
cvReleaseMat(&matX);
}
交流 QQ:1264768501















 4238
4238











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











