







1. 工作原理
- 人工张贴标志点
- 变换位置拍照
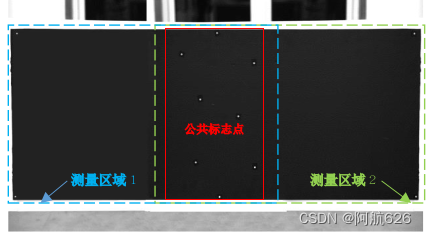
- 相邻照片的公共视野内有相同的标志点群
- 匹配两张照片对应标志点对
- 通过三对以上标志点对,实现两张照片间的坐标变换求解
2.标志点特征
-
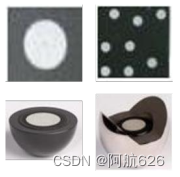
圆形
-
分类:
-
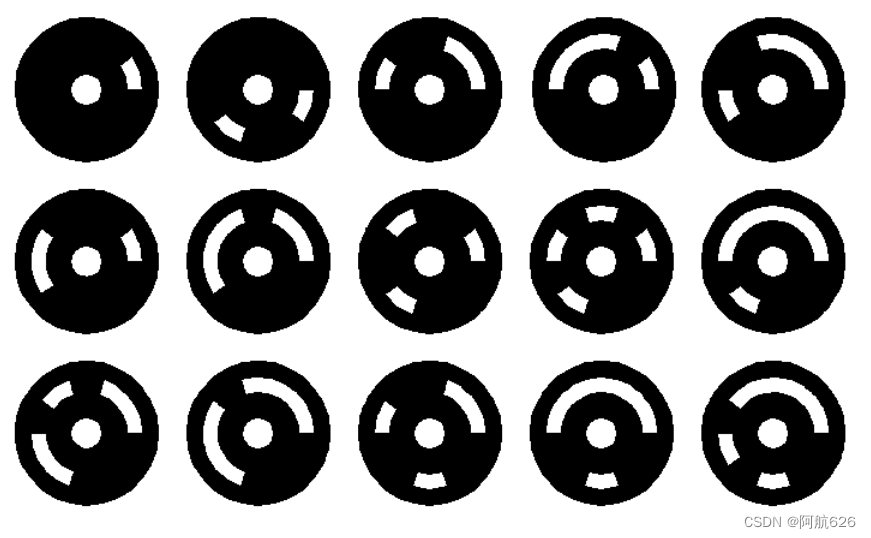
编码(粘贴于被测物体表面):
- 可利用编码信息辅助特征匹配
- 需要额外解码过程,空间利用率低
-
非编码(粘贴于被测物体表面)
-
视觉靶球:
- 与靶球座配合使用
- 可以与激光跟踪仪靶球替换使用(激光跟踪仪与配套靶球是目前最高精度的设备,常用作真值评估其他设备算法的精度)
-
-
特点:表面有大量玻璃微珠,有极高反射率,可以将大部分光线沿入射方向反射回去
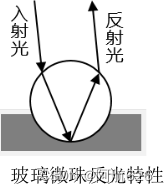
-
应用:一定强度的辅助光源照明,可以使其亮度远高于测量背景,照明方向和拍摄方向相同时可以获得较好的成像效果
3.距离约束的多视角标志点匹配
- 匹配原理:点集中几何信息不变量(两点间距离,两直线夹角、三角形面积等)
- 不同视角的坐标系间仅存在旋转和平移关系
4.坐标转换矩阵求解
- 不同视角的坐标变换:绕三个坐标轴的转动,一个平移,一个放缩(一般视角拼接不存在放缩,即放缩因子为1)
- 方法:
- 三点法:
-
3个非共线点求解坐标轴单位方向向量 - 计算简单
- 受点误差影响较大
-
- SVD法(奇异值分解法):
- 转换矩阵使得不同视角对应点的坐标误差和最小
- 求解精度高,可有效利用全部点对
- 四元数法:
- 求解精度高,可有效利用全部点对,计算简单、稳定性高
- 可引入异常点剔除准则,减少粗大误差点的影响(出去正常点对结果影响不大,去除异常点会有大影响)
- 三点法:
5.特征点布置
- 尽量充分分布于公共测量区域
- 需保证一定数目的公共点(一般200*300mm范围8个以上误差随公共点数目变化会趋于平稳)
















 4559
4559











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











