






安装并配置ROS环境
声明: 所有的ROS教程均来自ROSwiki 的Tutorials.
相信大多数人在做ROS tutorials的时候, 都是知其然不知其所以然. 用好几个帮助指令能让你边做教程,边学习, 而不是Copy & Paste.
1 安装ROS
ROS安装教程(From ROSwiki)
2 管理环境
通过这条指令可以查看ROS的环境设置, 比如: ROS_ROOT, ROS_PACKAGE_PATH等.
- ROS_PACKAGE_PATH非常重要, 他告诉了你的ROS工作路径, 有很多ROS包需要在这个路径下创建和编译.
$ export | grep ROS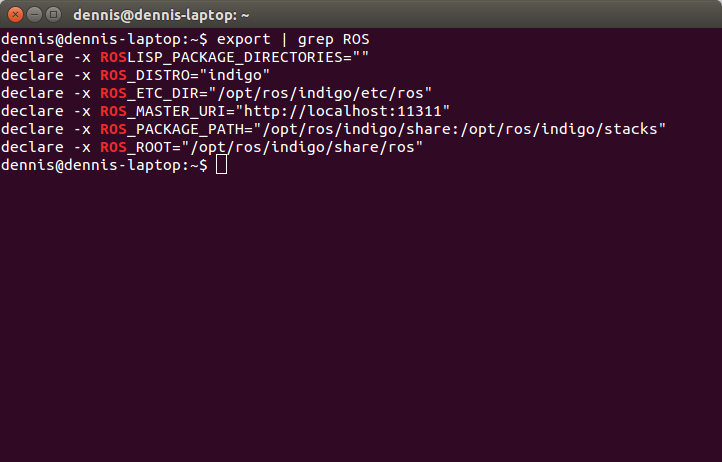
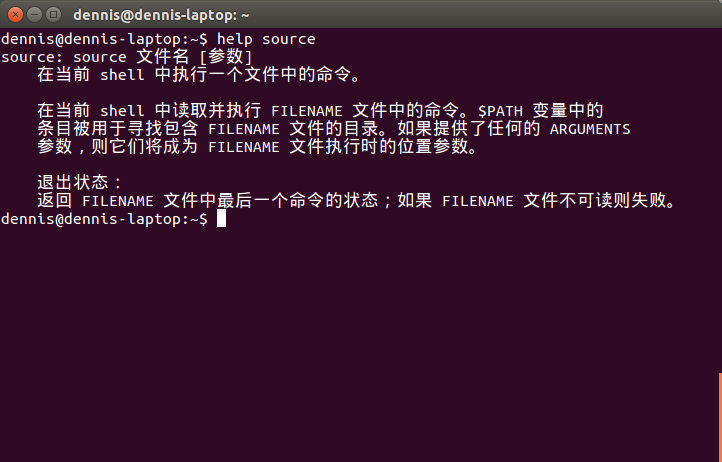
如果你输入如上指令, 发现没有配置, 则你需要source某些setup.*sh文件. 下面这条source指令是source你的ROS安装目录下的setup.bash文件. 我安装的版本是indigo.
# source /opt/ros/indigo/setup.bash- 如果不知道
source指令的功能, 可以使用help source查看帮助文件.
3 创建ROS工作空间
下面创建一个catkin工作空间, 同时编译它.
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src编译这个工作空间.
$ cd ~/catkin_ws/
$ catkin_makecatkin_make指令在catkin工作空间中是一个非常方便的工具.
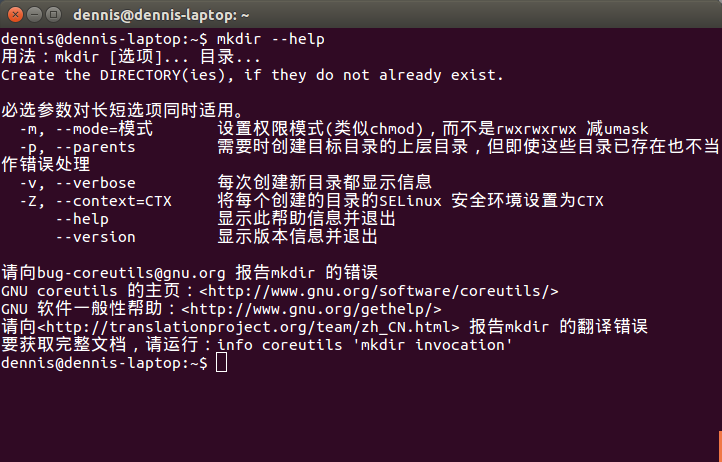
- 如果不懂这些语句意思, Ubuntu下有大量文本帮助.
请用好--help,man,help指令, 帮助理解指令.
我们source任何这个目录下的setup.*sh文件都可以将当前工作空间设置在ROS工作环境的最顶层.点击catkin(From ROSwiki), 了解更多.
$ source devel/setup.bash 要确保工作空间配置正确确保ROS_PACKAGE_PATH环境变量包含你的工作目录:
$ echo $ROS_PACKAGE_PATH
/home/dennis/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks- 经常在此犯错!
- 在创建一个
catkin_ws之后, 同时编译后, 在文件夹下有两个文件build和devel, 在devel文件夹下会看到多个.bash文件. 此时ROS_PATH变量下还没有包括这个路径, 需要source这个.bash文件才能把, 这个新建的catkin_ws工作空间加入ROS_PATH变量. - 每次在启动
终端的时候都需要source这个catkin_ws文件下.bash文件, 一种简便办法就是在home目录下打开.bashrc文件, 在最后加上一行添加source这个catkin_ws工作空间下.bash文件的绝对路径.
- 在创建一个















 1975
1975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









