







 本文是姿态解算系列的第一篇,主要探讨经验型卡尔曼滤波在数据融合中的应用。文章指出,陀螺仪的飘移误差和加速度计的噪声是关键考虑因素,通过描述高斯分布的噪声模型,展示了加速度计和陀螺仪的噪声特性。
本文是姿态解算系列的第一篇,主要探讨经验型卡尔曼滤波在数据融合中的应用。文章指出,陀螺仪的飘移误差和加速度计的噪声是关键考虑因素,通过描述高斯分布的噪声模型,展示了加速度计和陀螺仪的噪声特性。
目的:我们需要得到机器人运动的姿态信息,三个轴的角度以及角速度。
本文大纲:
1、传感器相关模型
2、坐标变换
3、经验型卡尔曼数据融合
4、姿态解算流程
5、DMP
6、数据融合效果
本文出处:http://blog.csdn.net/haishaoli/article/details/52965457
本文内容:
姿态解算总框图(欧拉角方式):

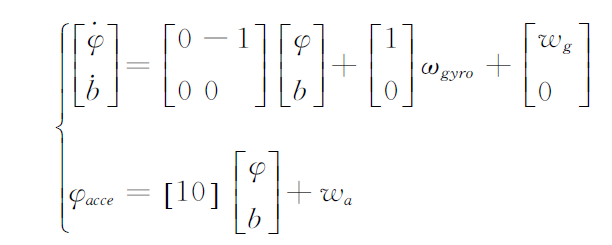
一、数据模型、 噪声模型及曲线
1、
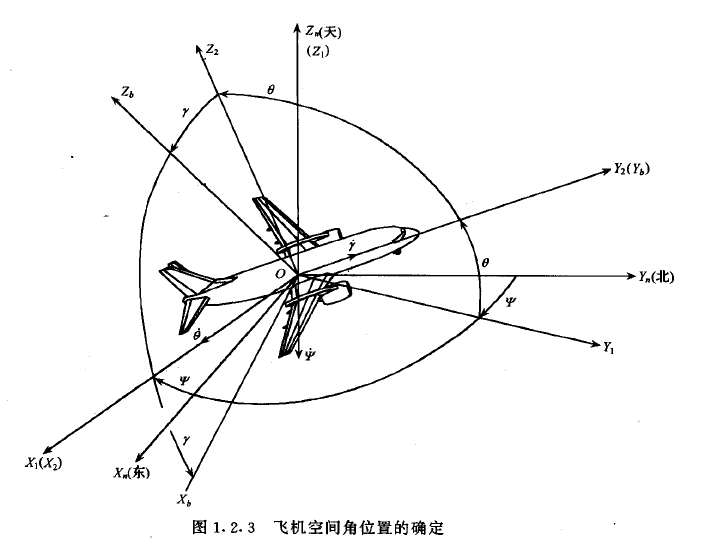
欧拉角定义:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8978
8978

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









