







PS::大家好,接下来我将推导下本质矩阵的由来,什么叫做对极约束,得到匹配点怎么来计算本质矩阵?什么是八点法?得到本质矩阵之后如何得到相机的外参?
1.归一化图像坐标
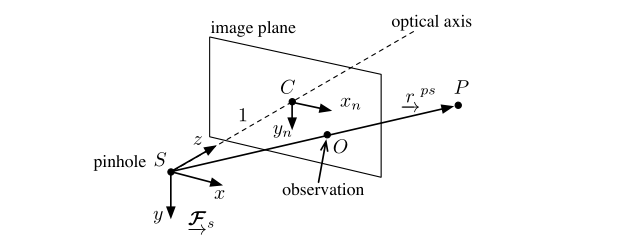
- 这里相机坐标系为,图像和坐标为O,这里假设焦距为1;图像坐标中心早光轴上。
-
空间中点P在摄像机坐标系下的三维坐标:
-
利用三角近似关系,P点的图像坐标(齐次坐标);
同时假设已知图像坐标,反推会发现只能得到空间坐标的两个约束关系,或者说Z可以是任意值都满足约束关系,即深度无法得到;
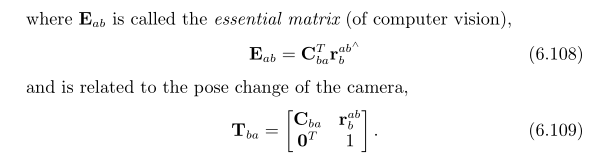
2.本质矩阵 essential matrix
2.1 本质矩阵的推导
-
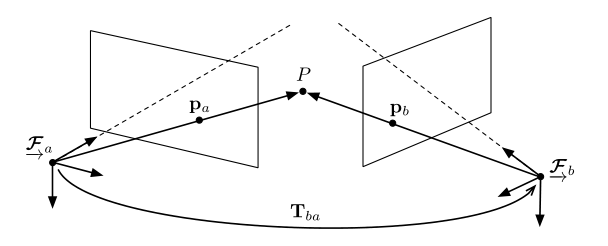
相机在不同时刻两帧图像同时观察到空间点P,如图:
-
P在两帧上的图像坐标满足几何约束:

-
其中称为本质矩阵,其参数由运动的pose决定,与相机内参无关;本质矩阵在位姿估计和相机标定上很有用;
-
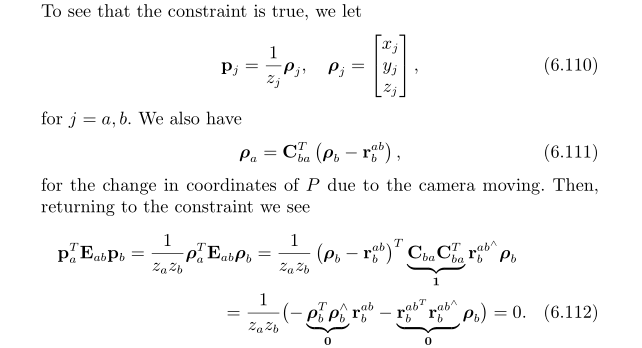
约束关系的证明:
什么叫做对极约束?
如何计算本质矩阵?
如何计算相机外参?什么是SVD?
如何遇到不存在对极几何关系,如何来估计相机的运动?
什么是单应矩阵?
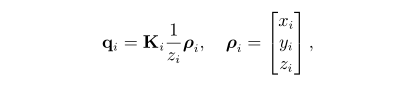
- 空间点三维坐标到像素坐标(齐次形式)的转换:
- 如果已知观察的点在某个平面上,利用平面方程的先验信息可以估计出深度
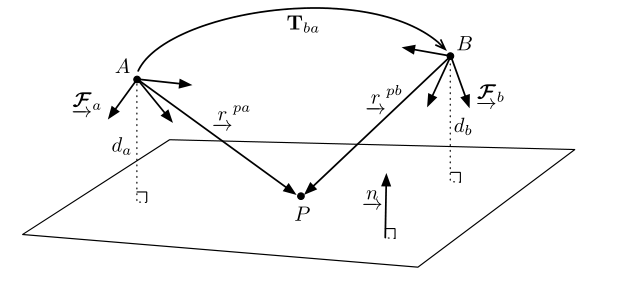
- 已知相机中心到平面距离和法向量,可以得平面的法线方程

- 将空间坐标替换为像素坐标:

-
替换掉,得到由像素齐次坐标到空间坐标的转换
-
空间点在前后两帧坐标系下的三维坐标的约束关系
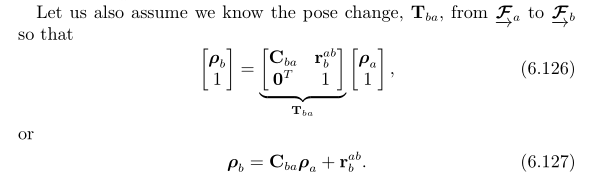
-
带入第一个公式,得到两帧之间同一空间点的像素点坐标的约束关系
-
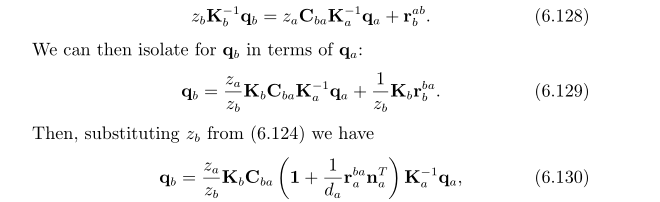
将上述公式简写为:

-
矩阵称为单应矩阵,其中用来度量图像的齐次坐标,可以去掉;所以单应矩阵是pose和平面参数的矩阵;
利用单应矩阵得到相机的外参?














 431
431











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









