







大家好,对于VSLAM研究人员当然要对最新的VSLAM的研究做下总结了,这次为大家介绍PL-SLAM。
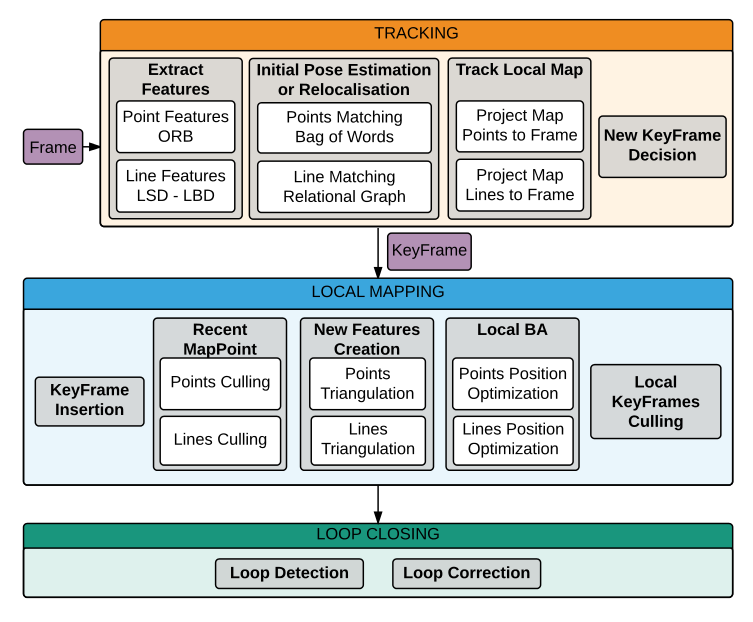
上图就是PL-SLAM的框架,是不是感觉和ORBSLAM很像呢?比较典型打特征法+直接法的结合的关键帧的Vslam
跟ORBSLAM有三个主要线程:跟踪 、构图、回环检测
一、Tracking(估计相机的位置,根据约束条件,产生新的关键帧)
特征提取方面:ORB、lsd的线条像素特征
(其实我们一直关系的一个问题,如果面对一面白墙怎么办?)
初始化估计:同样包含两种了一种是ORBslam的初始化形式,另一种则是应该树通过极限搜索的方式跟lsdslam比较像
重定位:词袋模型,关系图(同lsd是一样的)
二、Local MAPING
剔除:点和线剔除
三角化:点和线
局部BA:点和线
关键帧剔除
三、loop clousing
只做了点特征的回环,主要线条回环计算太大。
四、效果
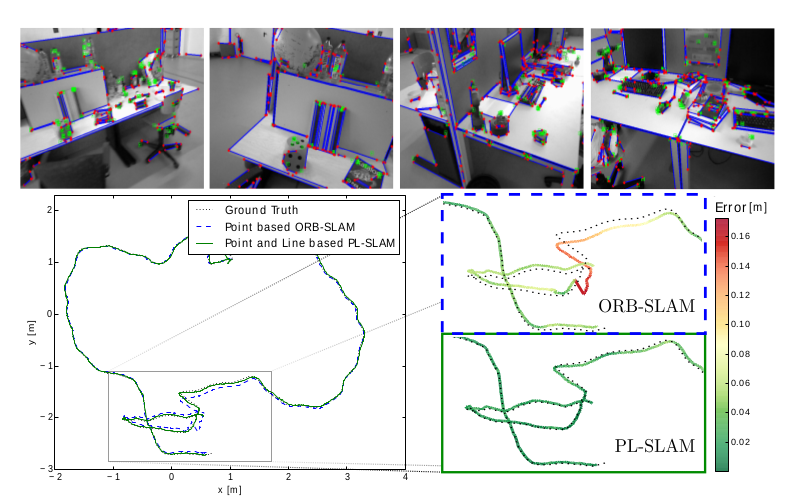

对比发现,精度有所提高!那么实时性怎么样呢?
作者测试的是20fps。
五、总结:
总体感觉是把ORBSLAM+LSDSLAM的比较优秀的前端策略加到一起,在关键帧的筛选上有些亮点,毕竟增加线条约束。亮点不多,主要现在还没有源码,没办法实际测试效果。作者也会在最近公开自己的源码。















 1512
1512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









