







 该博客介绍了在已知单目相机内参和畸变系数基础上,如何使用OpenCV3.0进行双目标定的过程。程序利用预设的标定图像,设置参数CALIB_USE_INTRINSIC_GUESS,完成双摄像头的行对准。最终结果显示为左右相机图像对齐的效果。
该博客介绍了在已知单目相机内参和畸变系数基础上,如何使用OpenCV3.0进行双目标定的过程。程序利用预设的标定图像,设置参数CALIB_USE_INTRINSIC_GUESS,完成双摄像头的行对准。最终结果显示为左右相机图像对齐的效果。
这里是在上一篇单目标定的基础上拓展来的进行双目标定的程序。
在这个程序里面,默认是先对两个摄像头分别进行了单目标定的,也就是说相机的内参数和畸变向量是知道了的。
所以在进行标定的时候,参数选择的是CALIB_USE_INTRINSIC_GUESS。
此程序依然是使用系统自带的标定的图片,其路径在opencv的安装目录下:opencv\sources\samples\data。
本程序最终的输出图像为
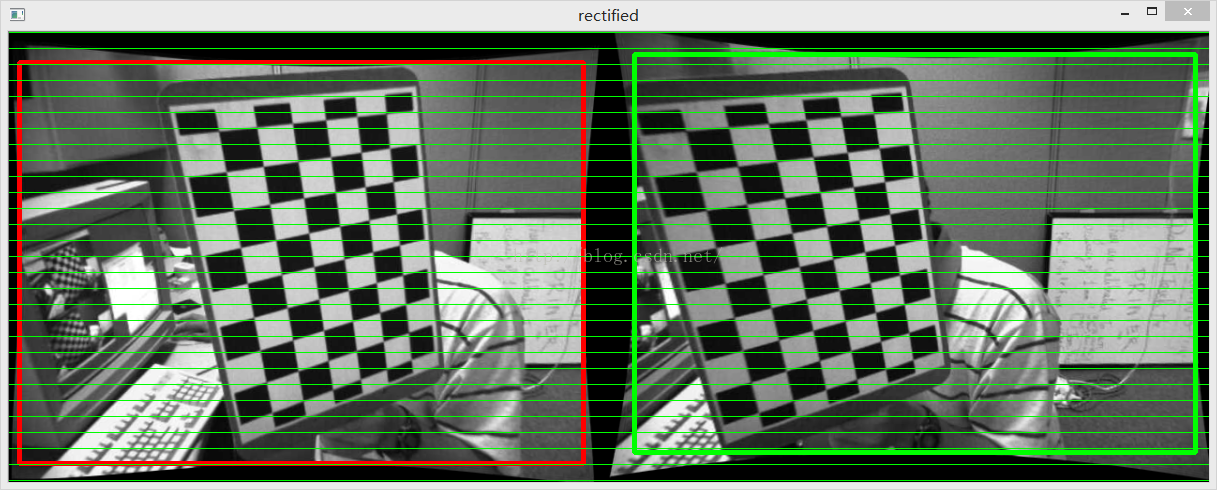
上图就是左右相机的图像经过行对准之后的结果。
具体的代码如下:
// stereoCalibration.cpp : 定义控制台应用程序的入口点。
//
//在进行双目摄像头的标定之前,最好事先分别对两个摄像头进行单目视觉的标定
//分别确定两个摄像头的内参矩阵,然后再开始进行双目摄像头的标定
//在此例程中是先对两个摄像头进行单独标定(见上一篇单目标定文章),然后在进行立体标定
#include "stdafx.h"
#include <opencv2/opencv.hpp>
#include <highgui.hpp>
#include "cv.h"
#include <cv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
const int imageWidth = 640; //摄像头的分辨率
const int imageHeight = 480;
const int boardWidth = 9; //横向的角点数目
const int boardHeight = 6; //纵向的角点数据
const int boardCorner = boardWidth * boardHeight; //总的角点数据
const int frameNumber = 13; //相机标定时需要采用的图像帧数
const int squareSize = 20; //标定板黑白格子的大小 单位mm
const Size boardSize = Size(boardWidth, boardHeight); //
Size imageSize = Size(imageWidth, imageHeight);
Mat R, T, E, F; //R 旋转矢量 T平移矢量 E本征矩阵 F基础矩阵
vector<Mat> rvecs; //旋转向量
vector<Mat> tvecs; //平移向量
vector<vector<Point2f>> imagePointL; //左边摄像机所有照片角点的坐标集合
vector<vector<Point2f>> imagePointR; //右边摄像机所有照片角点的坐标集合
vector<vector<Point3f>> objRealPoint; //各副图像的角点的实际物理坐标集合
vector<Point2f> cornerL; //左边摄像机某一照片角点坐标集合
vector<Point2f> cornerR; //右边摄像机某一照片角点坐标集合
Mat rgbImageL, grayImageL;
Mat rgbImageR, grayImageR;
Mat Rl, Rr, Pl, Pr, Q; //校正旋转矩阵R,投影矩阵P 重投影矩阵Q (下面有具体的含义解释)
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Rect validROIL, validROIR; //图像校正之后,会对图像进行裁剪,这里的validROI就是指裁剪之后的区域 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









