







一、定义
- 直接线性变换解法是建立像点的“坐标仪坐标”和相应物点的物方空间坐标直接的线性关系的解法。
- 直接线性变换解法的特点:
- 不归心、不定项
- 不需要内外方位元素的起始值
- 物方空间需布置一组控制点
- 特别适合于处理非量测相机所摄影像
- 本质是一种空间后交-欠交解法。
二、推演
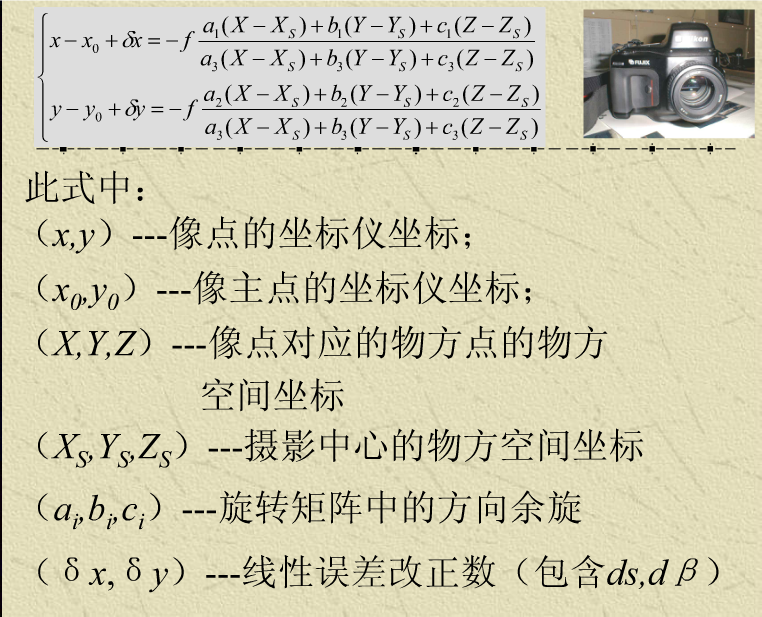
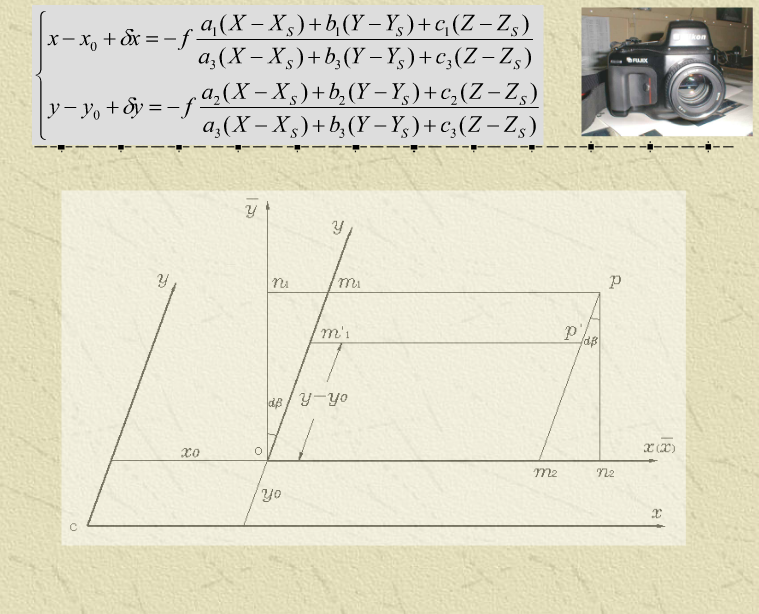
( x¯,y¯)[on2,on1] — 以像主点为原点,不包含线性误差的像点p的坐标;
[om2,om1] — 以像主点为原点包含不正交性 dβ 的坐标;
[om2,om1˙] — 以像主点为原点包含不正交性 dβ 误差及比例尺不一误差 ds 的像点p的坐标;
以上假设认为 x 轴方向无比例尺误差的影响。
- 设 x 轴方向比例系数为 1, 则 y 轴方向比例系数为 (1 + ds);
- 设 x 轴方向主距为
fx
,则 y 轴方向主距为
fy=fx/(1+ds) ;
δx=on2−om2=m2p⋅sindβ=om1⋅sindβ=(1+ds)(y−y0)⋅sindβ≈(y−y0)⋅sindβ
- δy=on1−om1˙=om1⋅dβ−om1˙=(1+ds)(y−y0)⋅cosdβ−(y−y0)=[(1+ds)⋅cosdβ−1](y−y0)≈(y−y0)⋅ds
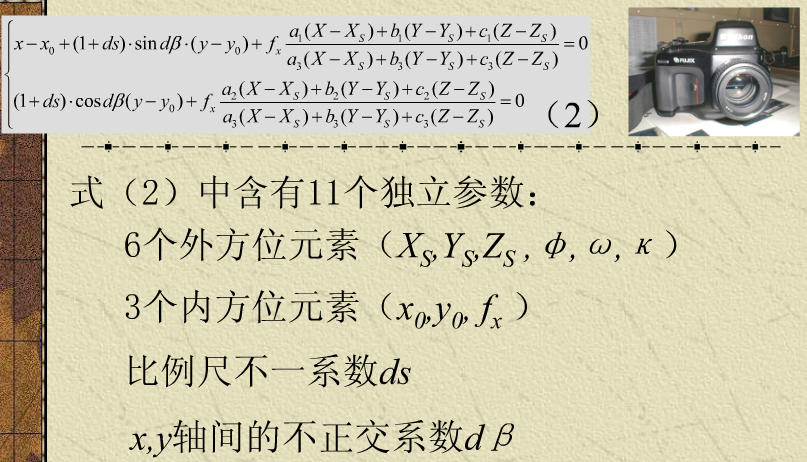
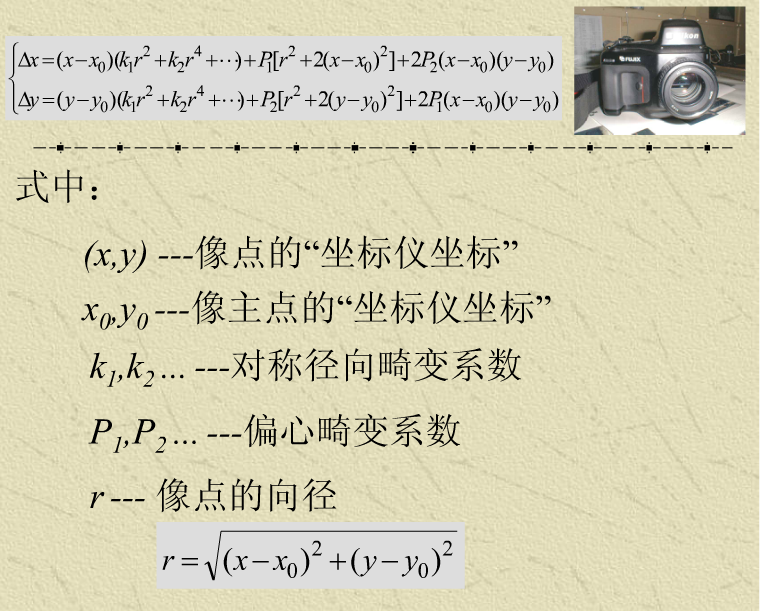
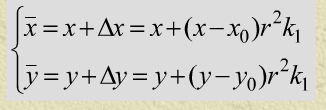
将
δx,δy代入式中:
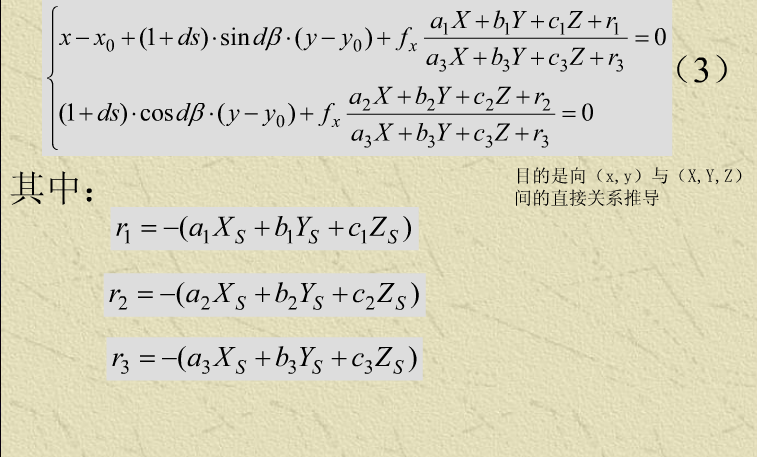
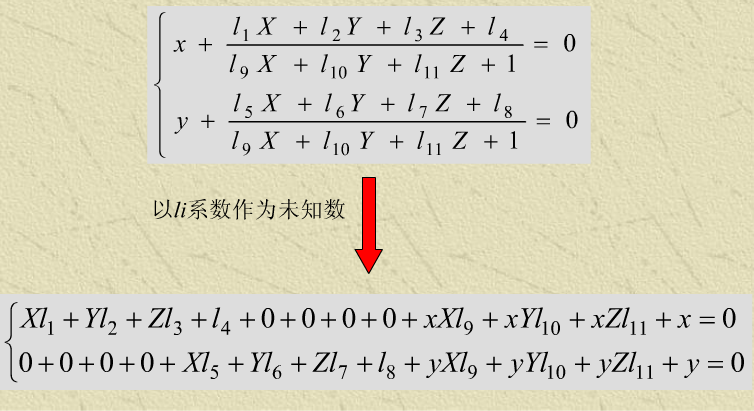
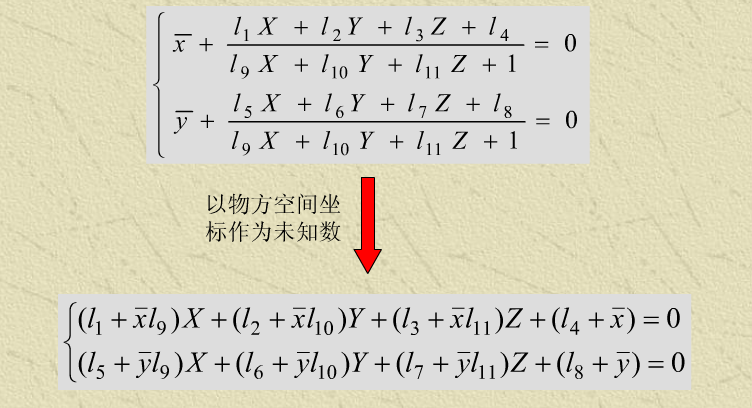
导出的基本关系式为(x,y)与(X,Y,Z)间的关系式,希望导出x=f(X,Y,Z),y=f(X,Y,Z)的形式:
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪x+l1X+l2Y+l3Z+l4l9X+l10Y+l11Z+1=0y+l5X+l6Y+l7Z+l8l9X+l10Y+l11Z+1=0
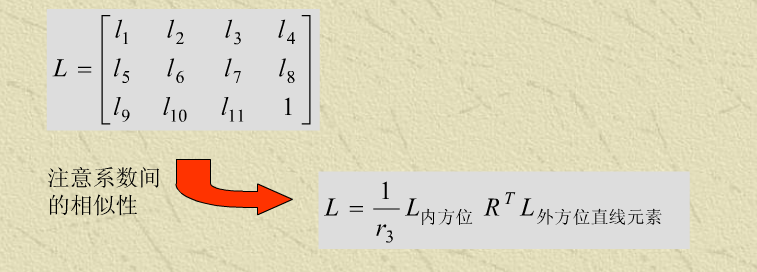
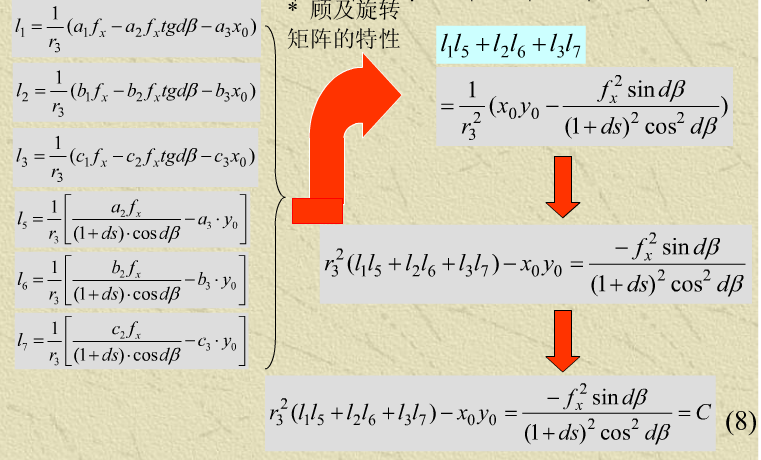
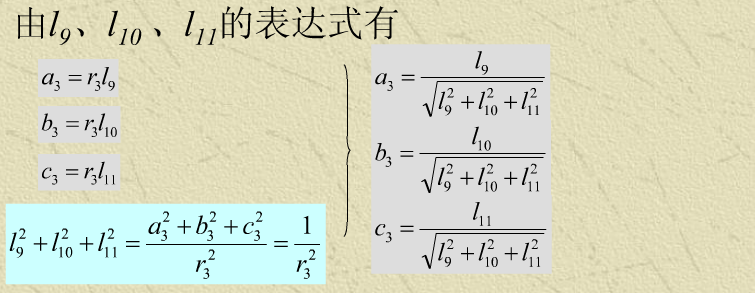
其中 li(i=1,2...11) 的系数是
外方位元素( Xs,YS,Zs,f,w,k)
内方位元素( x0,y0,f)
坐标轴不正交系数 db
坐标轴比例不一系数 dS
的函数
三、解算
li 系数近似值的解算
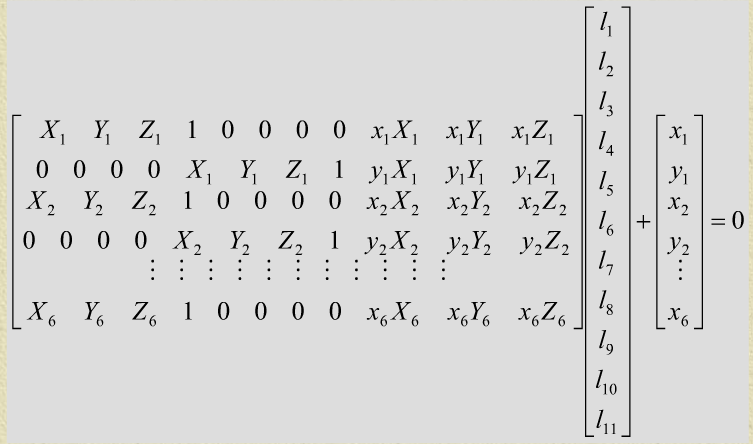
由物方空间控制点及对应的像点解算li系数近似值
li系数个数:11个
物方空间至少布置6个控制点
解算li系数的近似值,不需平差计算
只需选取11个方程解算11个li未知数
即,从控制点中挑出5.5个控制点,列11个方程解算
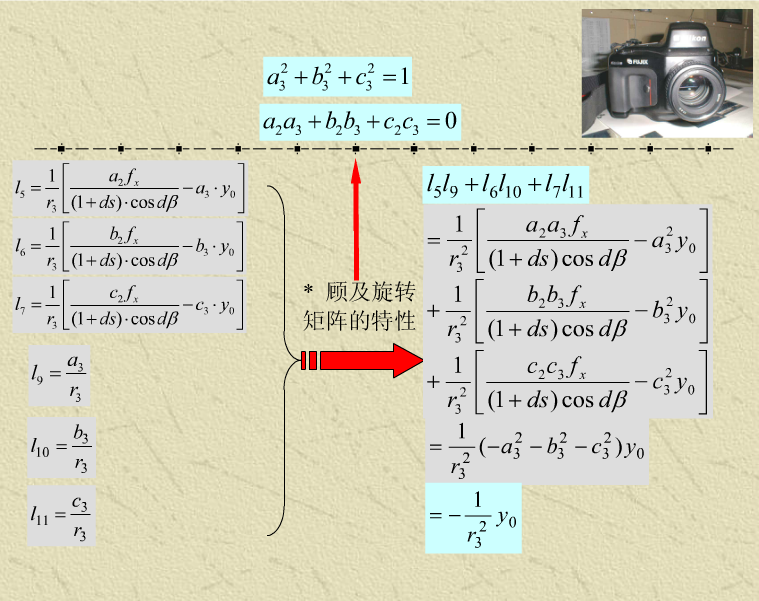
内方位元素 x0,y0 的解算
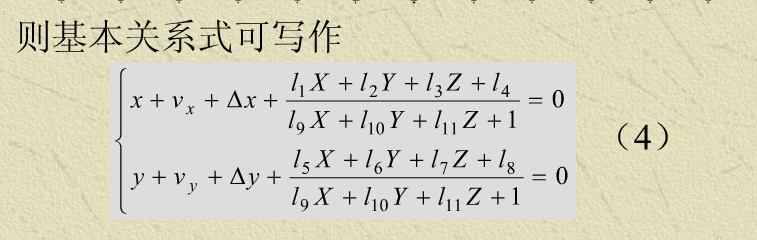
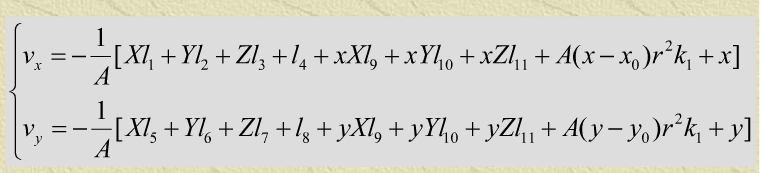
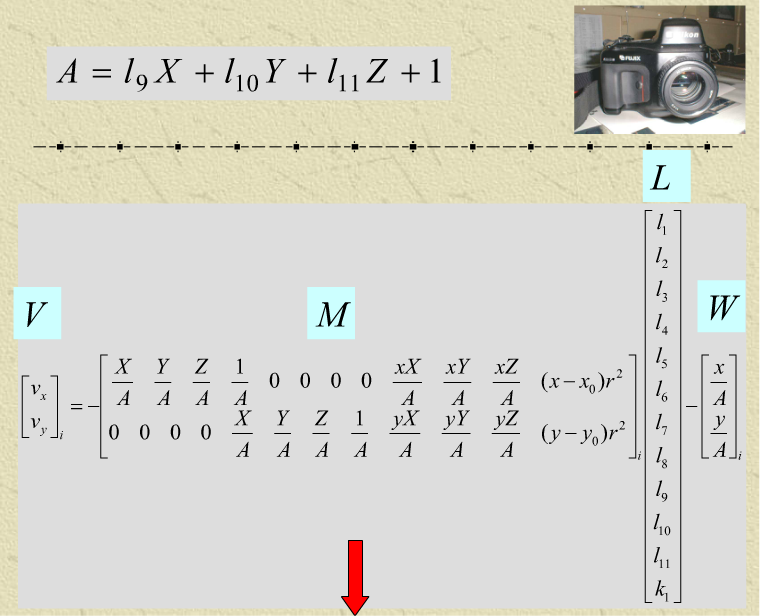
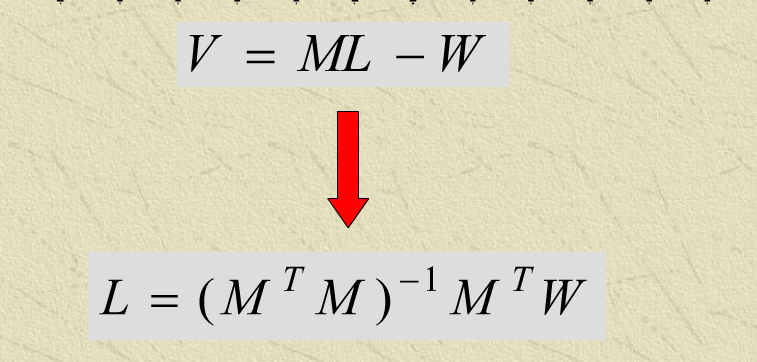
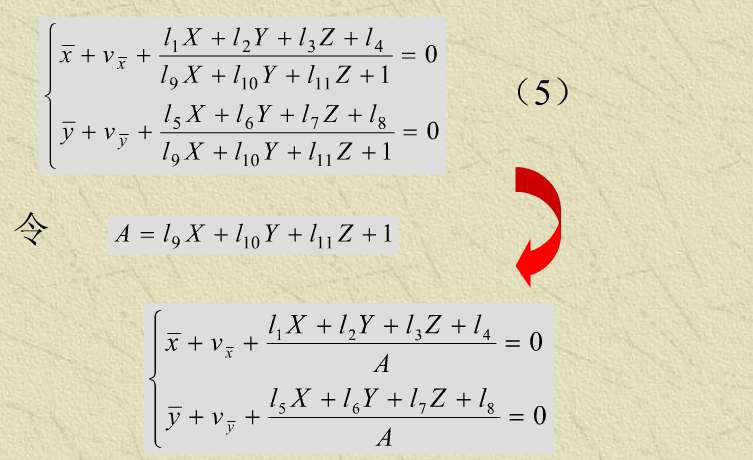
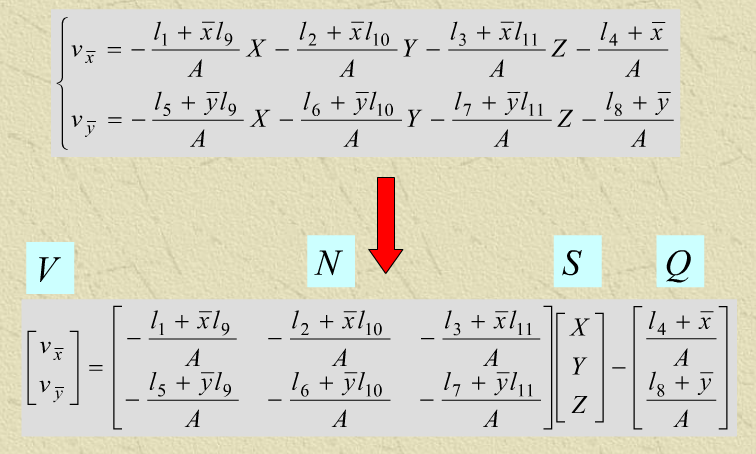
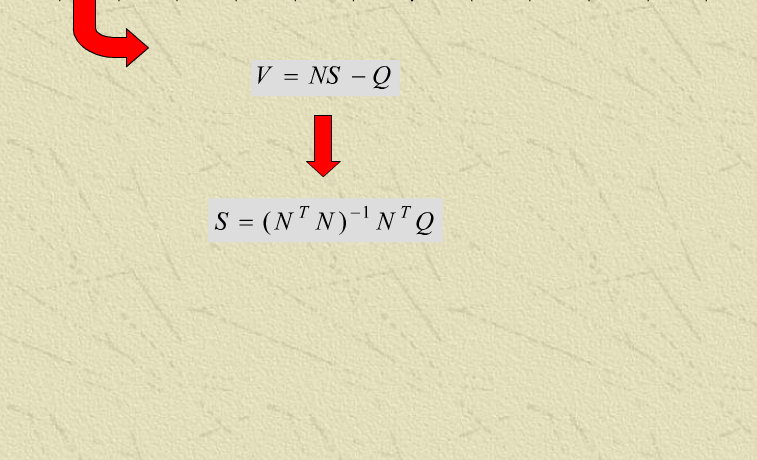
li系数精确值的解算
其中 vx、vy 为控制点的像点“坐标仪坐标”观测值改正数。
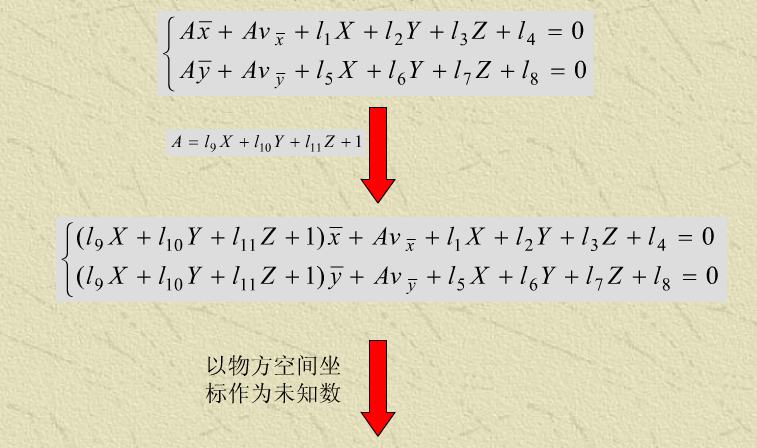
A的计算过程也为迭代计算过程,每次迭代A值得计算是通过控制点求得的。
牛顿迭代法:
待定点像点“坐标仪”的系统误差改正
待定点物方空间坐标近似值的解算
由li系数精确解及带定点的像点“坐标仪坐标”解算
未知数个数:3个
所摄像片数至少 2张影片
只需要选取3个方程解算3个未知数
即,从两张以上的像片中挑出1.5张,列3个方程解算待定点物方空间坐标精确值的解算·
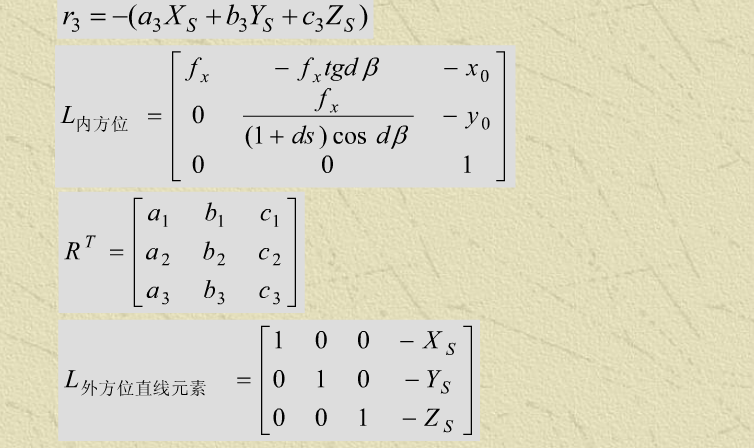
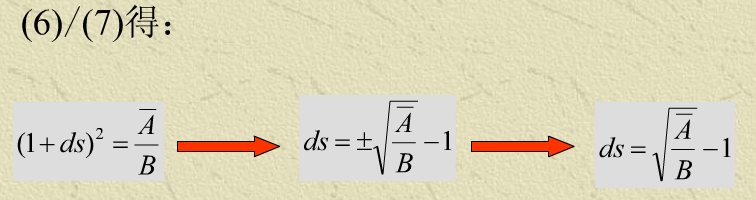
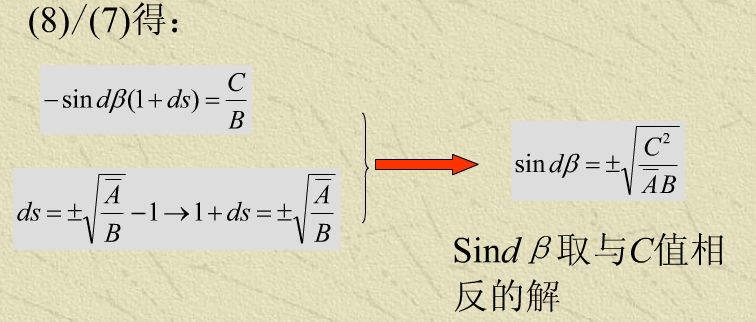
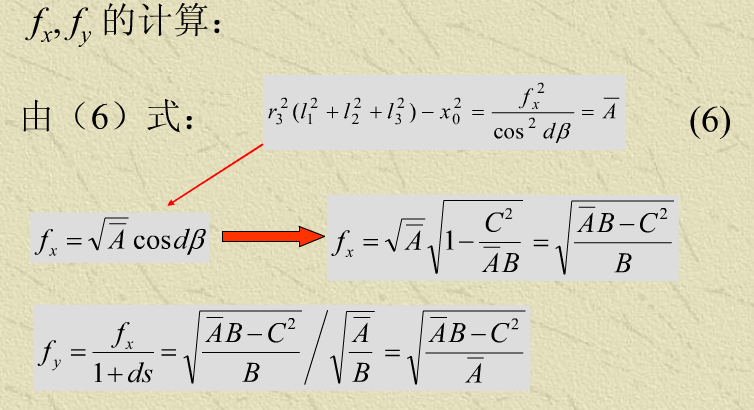
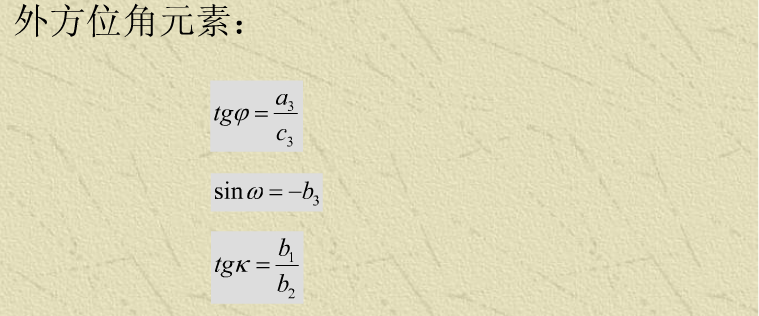
内外方位元素及ds、 dβ 的解算
















 7503
7503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









