






目录
配置AUTOSAR BSW中的Com过程中经常遇到的几个问题:
往期推荐
- ETAS工具链自动化实战指南<一>
- ETAS工具链自动化实战指南<二>
- ETAS工具链自动化实战指南<三>
- AUTOSAR工程师必读:Artop的核心功能
- Vector工具链自动化实战指南<一>
- isolar高手秘籍| ECU Configuration三分钟速成!
- 掌握核心步骤:RTA-BSW以太网配置全解析
- 一文详解TC399 CAN MCAL 配置
- LSL常见应用场景及示例<一>
- LSL常见应用场景及示例<二>
- LSL常见应用场景及示例<三>
- 为什么Autosar钟情arxml而非json?大揭秘!
- 深入浅出:SOME/IP-SD的工作原理与应用
- 【技术进阶】|一文掌握Autosar ComStack的精髓!
- Autosar培训笔记整理<一>
- 【AutoSAR进阶】|实战详解ETAS工具链UDS 0x2f服务核心配置!
- 实战详解ETAS工具链CanTp模块自动化配置
在这里总结下
配置AUTOSAR BSW中的Com过程中经常遇到的几个问题:
-
-
如何使用通信矩阵定义通信消息;
-
如何配置 BSW 通信模块,以便发送/接收特定消息;
-
帧、PDU 和信号之间的映射如何工作;
-
RTE 如何与 Com 和 A-SWC 进行接口;
-
A-SWC 如何与下层交换消息;
-
选择的通信协议是 CAN,以下所有信息将符合 AUTOSAR 关于 CAN 通信的规范。
-
以下通过ISOLAR-AB 及选择 通信协议 CAN为例进行相关阐述。
配置生成
ISOLAR-AB 允许导入 DBC 文件。DBC 代表 DataBase CAN,即包含以下信息的特定格式:
-
-
通信系统中的通信节点(ECUs);
-
消息的源、目标以及包含的信息;
-
消息与信号之间的映射;
-
DBC 默认消息被视为 CAN 帧。
-
导入 DBC 后,可以使用嵌入的 confGen 工具生成 BSW 配置。
DBC Importer允许选择要在 ISOLAR 项目中导入的通信节点(即 ECU)和相关消息。如果导入过程成功,在 ISOLAR 的图形视图下的system中,可以浏览消息、信号和 ECUs。
配置生成器( confGen)在命令面板中由符号 E 表示。它允许选择要使用的 BSW 生成器和要生成的 ECU。生成的配置有时是不完整的,需要根据特定的用例进行更改。
通信实体之间的映射
DBC 文件概览
DBC 文件具有独特的语法和语义来存储信息。关键字以粗体显示在括号中:
-
-
版本 (VERSION)
-
新符号 (NS_): 定义文件中使用的所有符号。需要注意的是:在 NS 中定义的符号应是实际在后续中使用的符号。如果定义了一个符号但未被使用,DBC 导入器可能会显示“DBC 文件无效”的错误信息。
-
比特定时 (BS_): 非常少见。在我们的情况下,符号仅被定义而没有参数。
-
通信节点 (BU_): 通信中的 ECU。
-
消息 (BO_): 组成通信的消息。定义新消息可能需要在 MCAL 中进行定义:在这种情况下,需要使用 MCAL 邮箱。
-
信号 (SG_): 每个消息应包含至少一个信号。
-
信号的属性、注释和类型定义;
-
通用/全局属性、定义、类型、值和信号及消息的类别;
-
CAN 消息描述
基本上,CAN 消息包含两个部分:
-
-
CAN 标识符或 CANId;
-
负载;
-
实际上,CAN 有两个不同的版本。这影响消息的解码。特别是,影响字段是 CAN 标识符,可以是 11 位(常规类型)或 29 位(扩展类型)。而负载长度最多为 64 位。因此,CAN 消息的最大长度为 96 位或 12 字节。
CAN 消息的强制属性包括以下内容,以及标识符:
-
-
消息长度(通常以字节为单位);
-
消息的源;
-
消息的目标;
-
从 CAN 消息到 DBC 文件,考虑以下消息(扩展 CAN):
![]()
CAN 标识符由 32 位中最重要的 29 位表示(较不重要的位在右侧)。因此,CAN 标识符的范围可以是 0x0 到 0x1FFFFFFF(536,870,911)。
消息的其余部分包含信号。信号描述应包含:
-
-
信号名称;
-
信号起始位(起始点是负载左侧的第一个位);
-
信号编码:
-
0 表示 BIG ENDIAN(编码从最重要的位/字节开始,按位置顺序);
-
1 表示 LITTLE ENDIAN(编码从较不重要的位/字节开始,按位置顺序);
-
-
数据符号(有符号或无符号);
-
信号值计算(最常见的是 LINEAR,对于布尔值提供 1 和 0);
-
信号下限和上限;
-
值的测量单位;
-
信号的目标节点。
-

有关 DBC 文件中消息及相关信号描述的详细信息,可查看相关文档进行详细系统学习,这里暂不做过多赘述。
在应用层和RTE层的信号管理
通常,在应用层,通信通过虚拟功能总线(Virtual Functional Bus)实现,这依赖于端口、接口和数据元素的定义。当一个实际系统被配置时,如果两个应用软件组件被映射到不同的ECU上,消息发送将通过总线系统进行。消息中包含的数据仍然由软件组件端口读取或写入,但它们会经过整个AUTOSAR stack。因此,一个应用软件组件需要以下元素:
-
-
定义一个端口,并关联相关的端口接口和数据元素(这些元素应符合信号的性质)。
-
在这个阶段,Tx和Rx信号没有区别,因此组件可以包含Tx和Rx端口的定义。
-
定义一个可运行单元(runnable)和一个相关函数以使用该端口。
-
定义一个事件以指定可运行单元与RTE的交互。
-
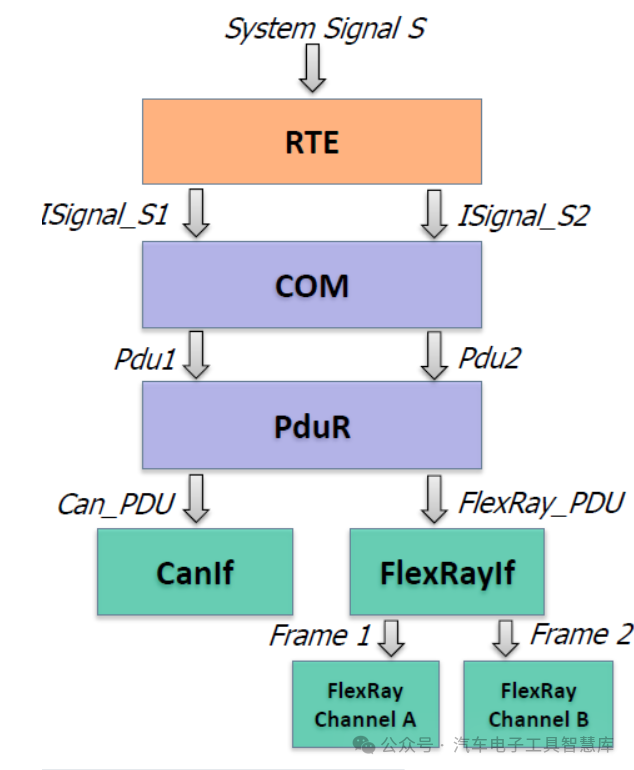
在分层架构中,信号转换的第一个步骤是在RTE和Com之间的接口中。为了生成BSW和ASW之间的RTE接口,需要从系统描述中提取出一个特定于ECU的实现。这就是ECU提取(ECU Extract)。
主要来说,系统描述包含了应用软件组件在ECU中的映射,以及系统数据映射,其中应用软件组件的端口接口与所有信号信息(如系统视图中所述)、PDU和帧(定义原始消息)相关联。请参见以下图片:
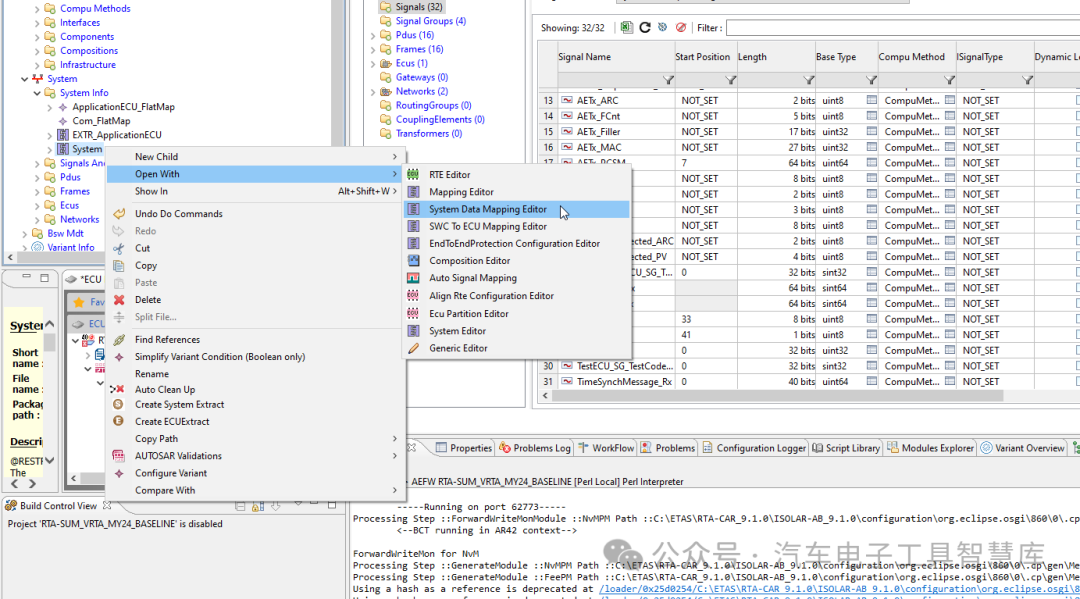
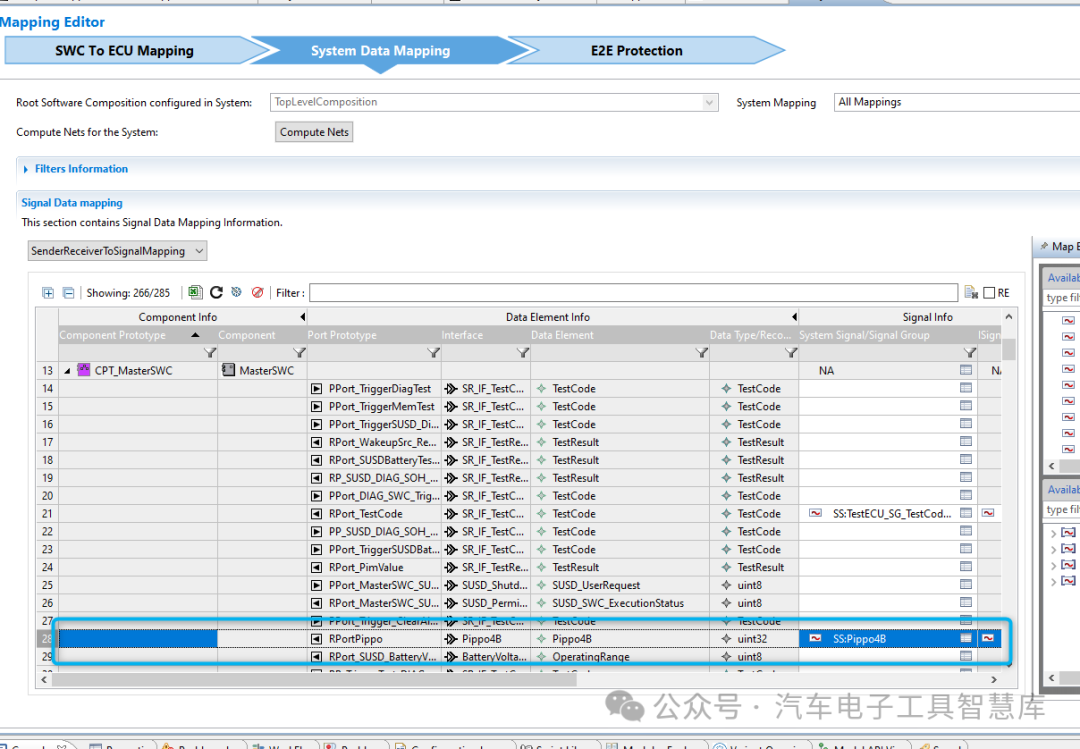
注意:COM模块(BSW)实际上将PDU和信号定义为配置容器(对象)。也就是应用层无法知晓有关单个信号的所有配置和校准方面。在Com中,主要的配置容器有:1)Com/ConfigSet/comIPdus,其中包含对2)Com/ConfigSet/ComSignal的引用。后者仍然包含对信号映射的引用,信号映射是根据系统模板(EcuC模块描述)定义的。
在BSW层的信号和消息管理
AUTOSAR BSW层包含通信栈,这些栈在服务层、ECU抽象层和微控制器抽象层之间垂直分布。此外,系统服务中还有一个通信管理器模块。所有这些BSW模块需要进行配置,以便在总线系统上允许信息交换,并将信息转发到应用层。对于ComM,configSet直接生成一个应用服务组件。
在通信服务中,主要与RTE直接“连接”的模块是Com和Dcm。基本方面包括BSW模块之间的依赖关系以及它们与BSW管理器之间的依赖关系。
通信服务可能会强烈依赖于网络管理。例如,部分网络管理将需要配置比经典通信更多的模块。LIN网络的管理也是如此。有关引用依赖关系的快速视图见下文小节。
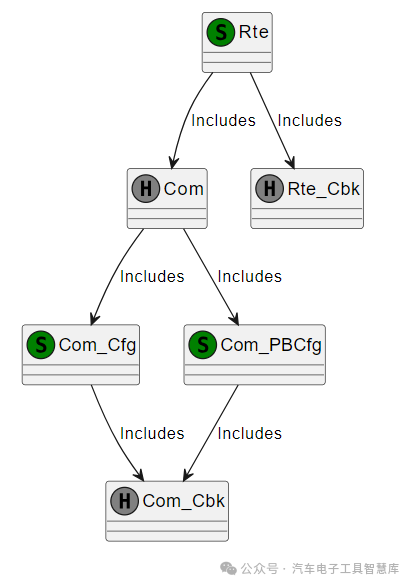
Com模块说明如下
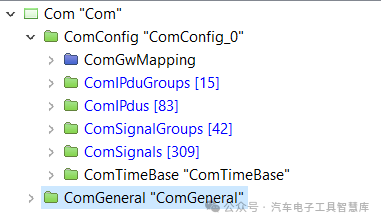
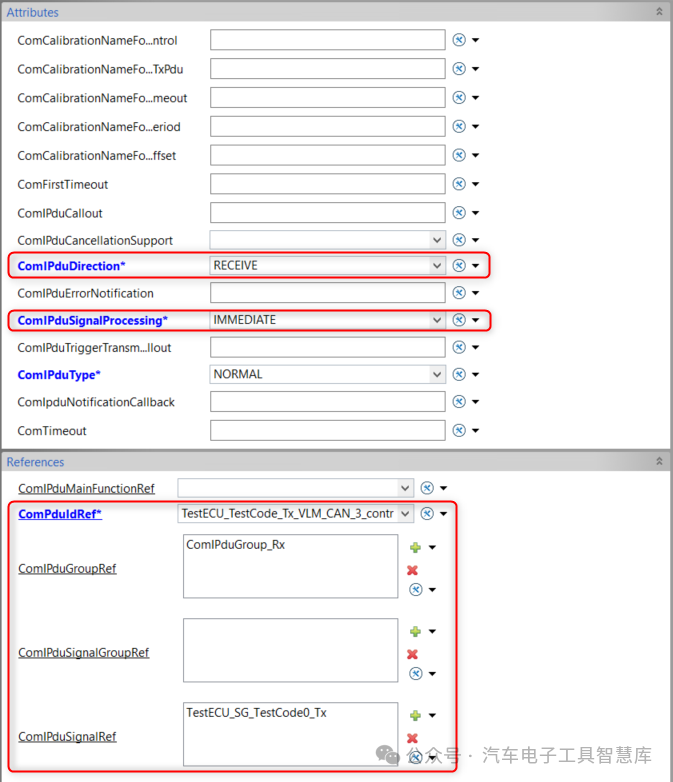
ComPdu的描述如下:
ComPduIdRef:引用EcuC中的Pdu结构定义(EcuC/ConfigSet/Pdu)。这类似于一个全局定义,可以被Com栈中的所有其他模块继承来描述Pdu。
ComIPduGroupRef:引用IPduGroup。这是一个对Com/ConfigSet的容器引用。Pdu组实际上用于部分网络管理,在此范围内非常有用。
ComIPduSignalGroupRef:引用Com/ConfigSet/ComSignalGroup。如果ComIPdu的这个引用不为空(不同于NULL),则它对ComIPduSignal的引用将为空。在这种情况下,ComNotification将为每个配置为I-PDU且引用设置为信号组的Com提供通知。
ComIPduSignalRef:引用当前Pdu中的信号。每个PDU可以包含多个信号。这些信号在Com/ConfigSet/ComSignal中进行描述。
ComSignal配置容器在应用层与BSW之间的信息交换中非常有趣。信号描述将类似如下:
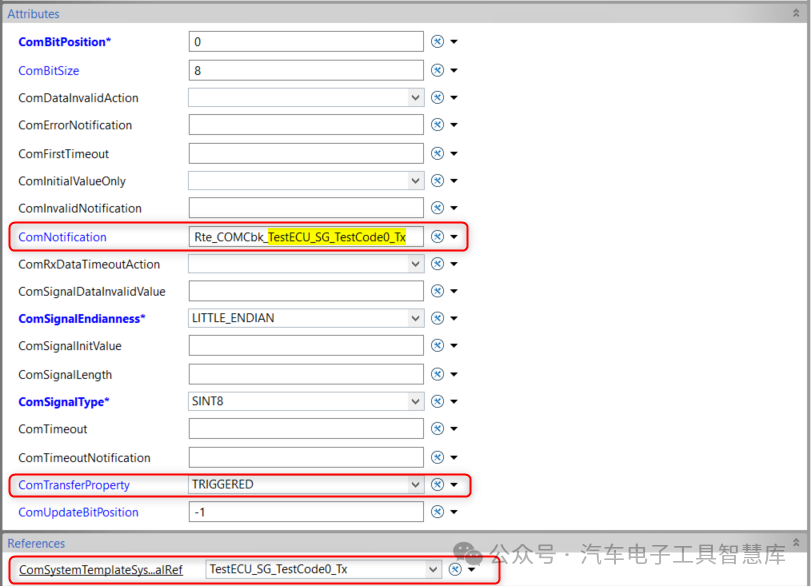
参数ComNotification可以设置为生成回调(callback)。该回调将提供通信状态的信息。ComNotification可以为以下对象配置:
发送(Tx)端
-
-
信号;
-
信号组;
-
I-PDUs。
-
接收(Rx)端
-
-
信号;
-
信号组;
-
I-PDUs。
-
发送端的回调
-
-
声明:Com_Cbk.h
-
定义:用户范围
-
调用:
void Com_Cfg::Com_TxNotify_<SignalName>(void)
-
接收端的回调
-
-
声明:
-
Com_Cbk.h:声明在ComNotification描述中配置的回调;
-
Rte_Cbk.h:声明带有静态名称的回调,形式为
Rte_Cbk_<SignalName>。
-
-
定义:根据Rte_Cbk.h中的声明,由RTA-RTE生成器在Rte.c中完成。
-
调用:
-
在实现ComNotification中配置的原型声明的用户函数中调用(用户范围 - 当应用软件组件绕过RTE调用回调时非常有用)。
-
如果回调名称与RTE生成的相同,则实现是通用的。
-
静态函数指针由RTA-BSW生成器自动分配,位于结构类型
Com_Prv_xTxSigCfg_tst中(Com_Cfg.c资源)。
-
-
ComM 说明
通信管理器(Com Manager)是一个系统服务模块,主要负责通信范围内的模式管理。它是部分网络管理的关键模块。实际上,部分网络支持通过配置参数在ComM中实现。容器Pnc(部分网络集群 - 不要与RTA-SUM_PNC = 部分网络协调器混淆!)描述了与部分网络相关的所有配置方面。
需要注意的是,部分网络在更高层次上(包括服务层)是纯粹“逻辑”的。在服务层,部分网络的上下文只是以下内容的集合:
-
-
在某个信道上通信的ECU;
-
该信道上的PDU
-
实际上,部分网络是以下两者之间的映射:
-
-
一个ECU可以通信的CAN信道;
-
在特定时刻可以在该信道上运行的已启用/禁用的PDU。
-
启用部分网络代表着允许在该信道上传输/接收映射的PDU组。此映射存在于通信系统的每个ECU中。启用和禁用模式需要模式管理器的服务,例如ComM、BswM、EcuM等。
因此,支持部分网络管理需要配置部分网络集群以及网络管理模块的配置,否则将无法成功生成BSW代码。以下图表展示了ComM与其他BSW模式之间的主要依赖关系:
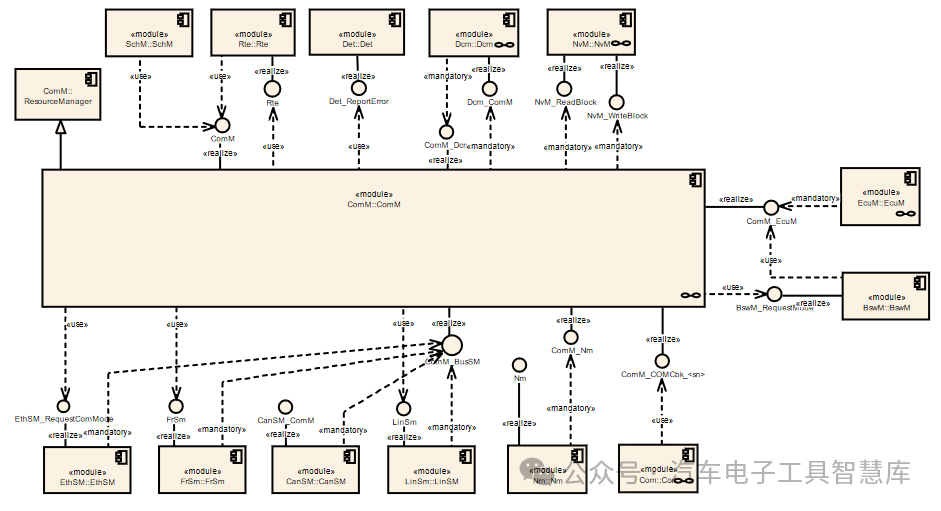
部分网络集群作为一个有限状态机(Finite State Machine)工作,以管理通信模式。每个部分网络集群是一个独立的有限状态机,服务于特定的ComM用户(ComMUser)。ComM用户是用于跟踪ECU分区内通信的对象(在实际RIP中未使用,但可用于安全概念)。如果部分网络集群被启用,系统通信中的节点将使用NM帧交换信息,主要包括请求和释放。每个部分网络集群将在NM中为自己使用一个专用的位位置。
mailbox
DBC只是用于通信的系统描述,这种描述仅足够用于生成服务层的配置。请记住,消息最初是物理信息。要将其转换为逻辑信息,消息必须在MCAL(驱动程序)和CanIf(接口)中定义。借助mailbox的功能,这种定义才得以实现。mailbox是在MCAL中定义的,必须在ISOLAR项目的CanIf配置中体现。
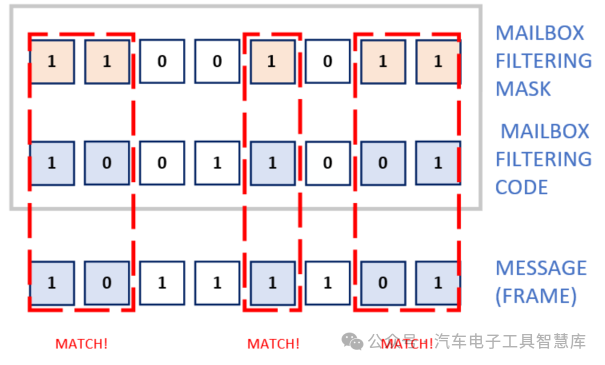
mailbox是容器,可以将多个消息分组。分组是通过CAN消息标识符实现的:如果CAN消息标识符通过了适合特定mailbox的过滤值,那么它将被分组到同一个mailbox中。当然,过滤值的定义应与CAN的类型匹配:扩展版应为29位,普通版为11位。每个mailbox可以包含一个或多个消息。
mailbox可以通过TresOS 16工具进行配置。该工具允许以图形方式定义掩码,而不是手动处理掩码。请记住,邮箱是硬件对象,因此受目标系统硬件资源的限制。有关这些限制的所有信息应从目标系统的用户手册中获取。Tresos可能需要为每种目标系统使用专用编译器。
关于ISOLAR:mailbox的配置也必须在ISOLAR项目中体现。这是因为其他模块会使用多个引用,例如EAL(ECU抽象层)中的接口模块。如果查看ISOLAR中Can的配置描述,就会注意到以下信息:
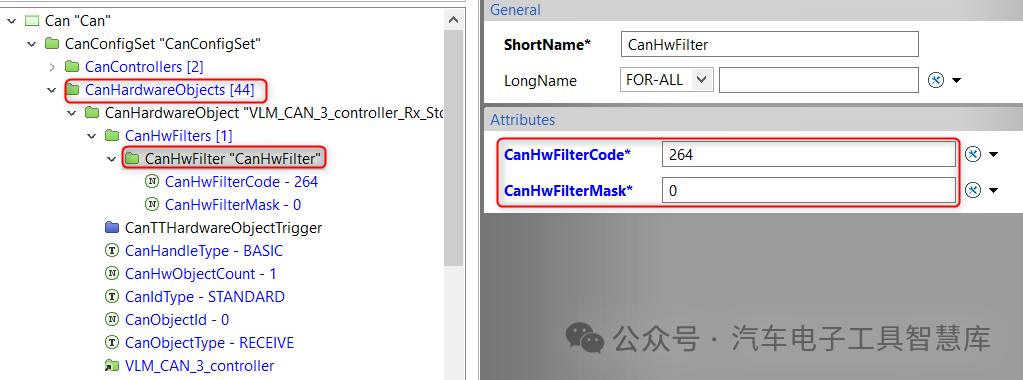
CanHardwareObject容器引用了一个邮箱。子容器**CanHwFilter**包含关于邮箱过滤机制的所有信息。两个参数是:
-
CanHwFilterCode:指定通过硬件过滤的标识符范围。传入的消息必须匹配该值的特定位位置。
-
CanHwFilterMask:定义基于硬件的CAN标识符过滤掩码。掩码通过1来标识需要关注的传入消息位位置,而忽略位位置则用0表示。
过滤机制的示例
mailbox作为硬件对象由CanIf的配置集引用,如下所示:
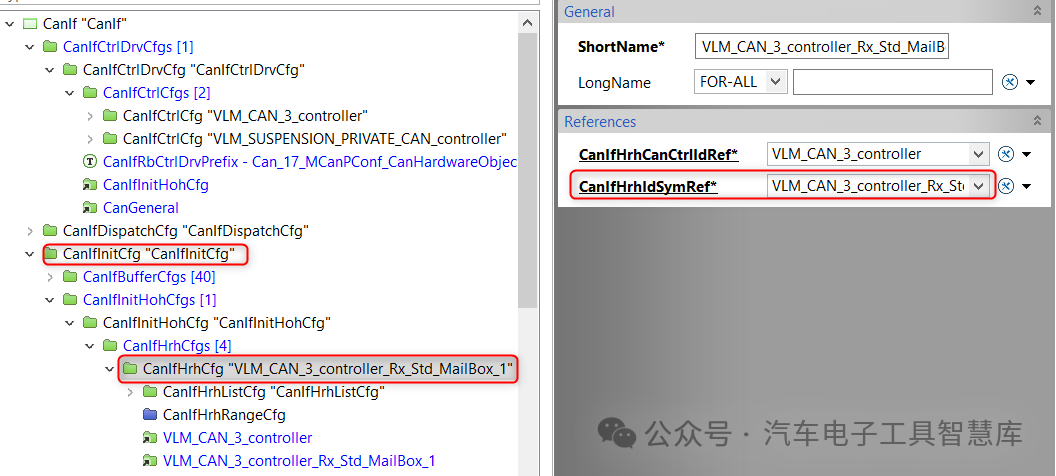
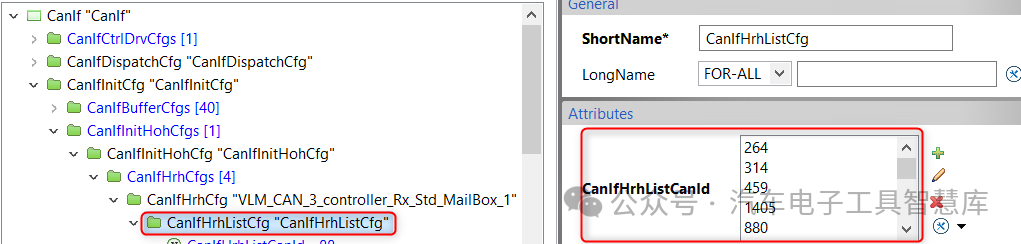
该引用指向mailbox硬件对象的定义,其中包含过滤代码和过滤掩码值。深入配置结构,可以找到根据mailbox配置的所有可能接收消息的列表:


















 294
294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









