





@[TOC](多传感器融合导航论文积累)
# 知识点总结
## 因子图
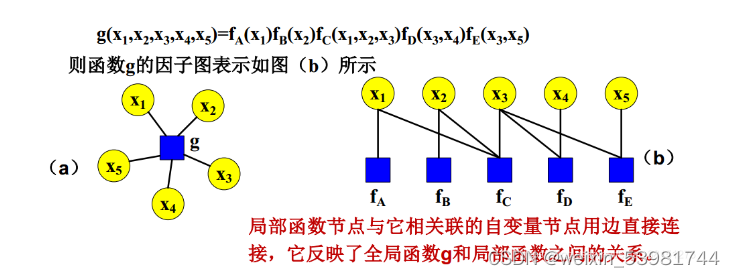
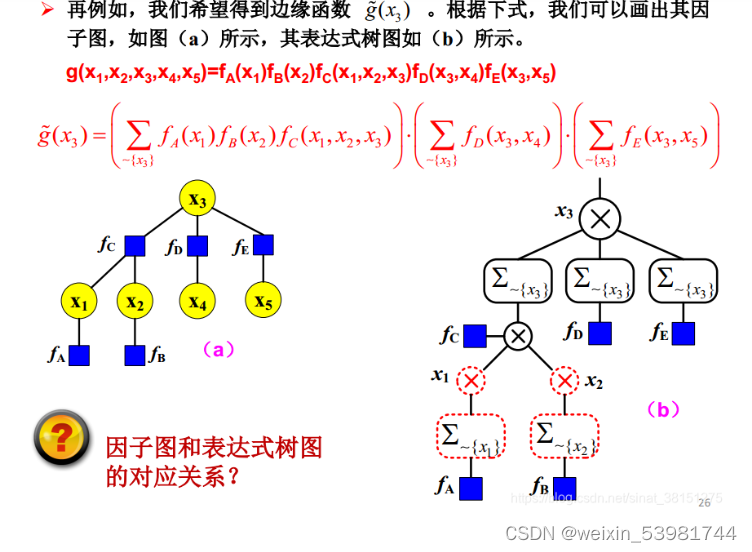
Factor Graph 是概率图的一种,是对函数因子分解的表示图,一般内含两种节点,变量节点和函数节点。
因子图存在着:**两类节点: 变量节点和对应的函数节点**变量节点所代表的变量是函数节点的自变量。 同类节点之间没有边直接相连。
## 一致因子图
一致性指的是在该框架中能够保持一致性地更新变量的值,使得整个概率图模型中的变量和因子之间的关系是一致的。
# 文献阅读笔记[IF 18.6]
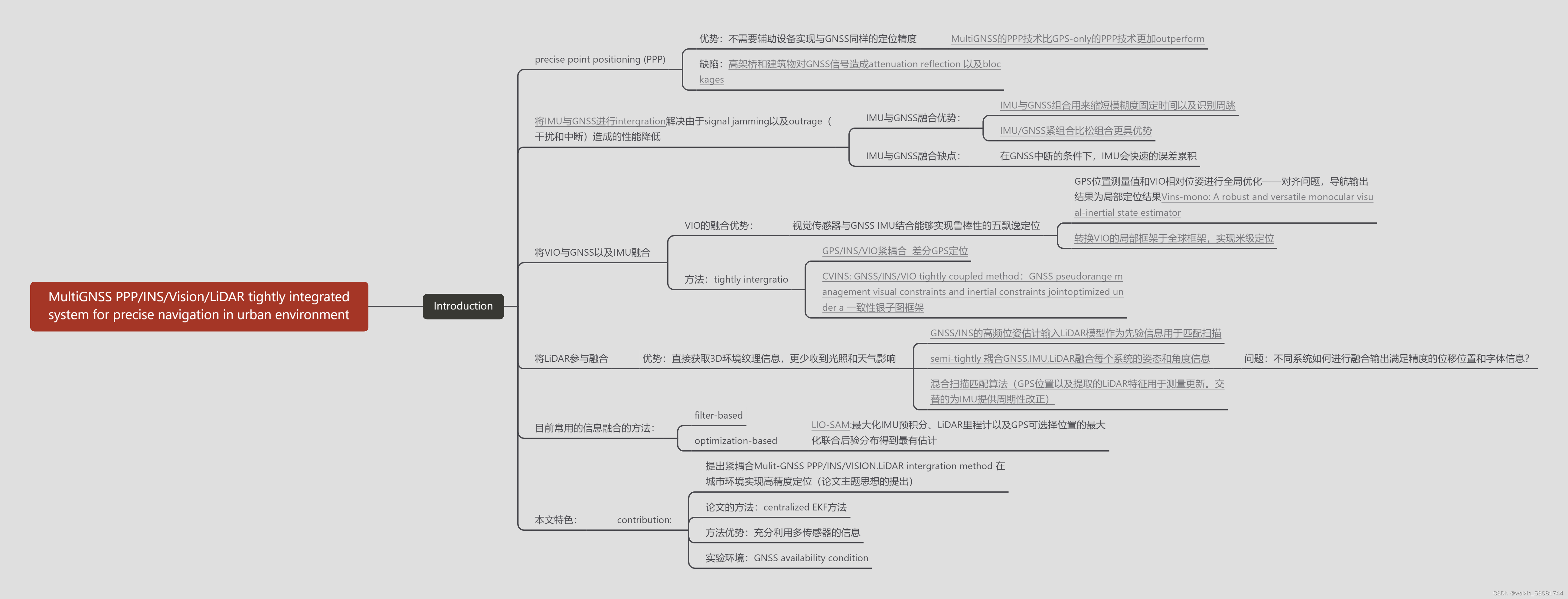
文章阅读总结:多传感器融合:GNSS微弱信号场景的补救措施
最新推荐文章于 2024-07-25 01:51:24 发布

 本文介绍了因子图的基本概念,包括变量节点和函数节点的构成,以及一致因子图在保持模型一致性方面的特点。重点回顾了IF18.6文献中关于这一主题的内容。
本文介绍了因子图的基本概念,包括变量节点和函数节点的构成,以及一致因子图在保持模型一致性方面的特点。重点回顾了IF18.6文献中关于这一主题的内容。















 1502
1502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









