







💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
本文包括:
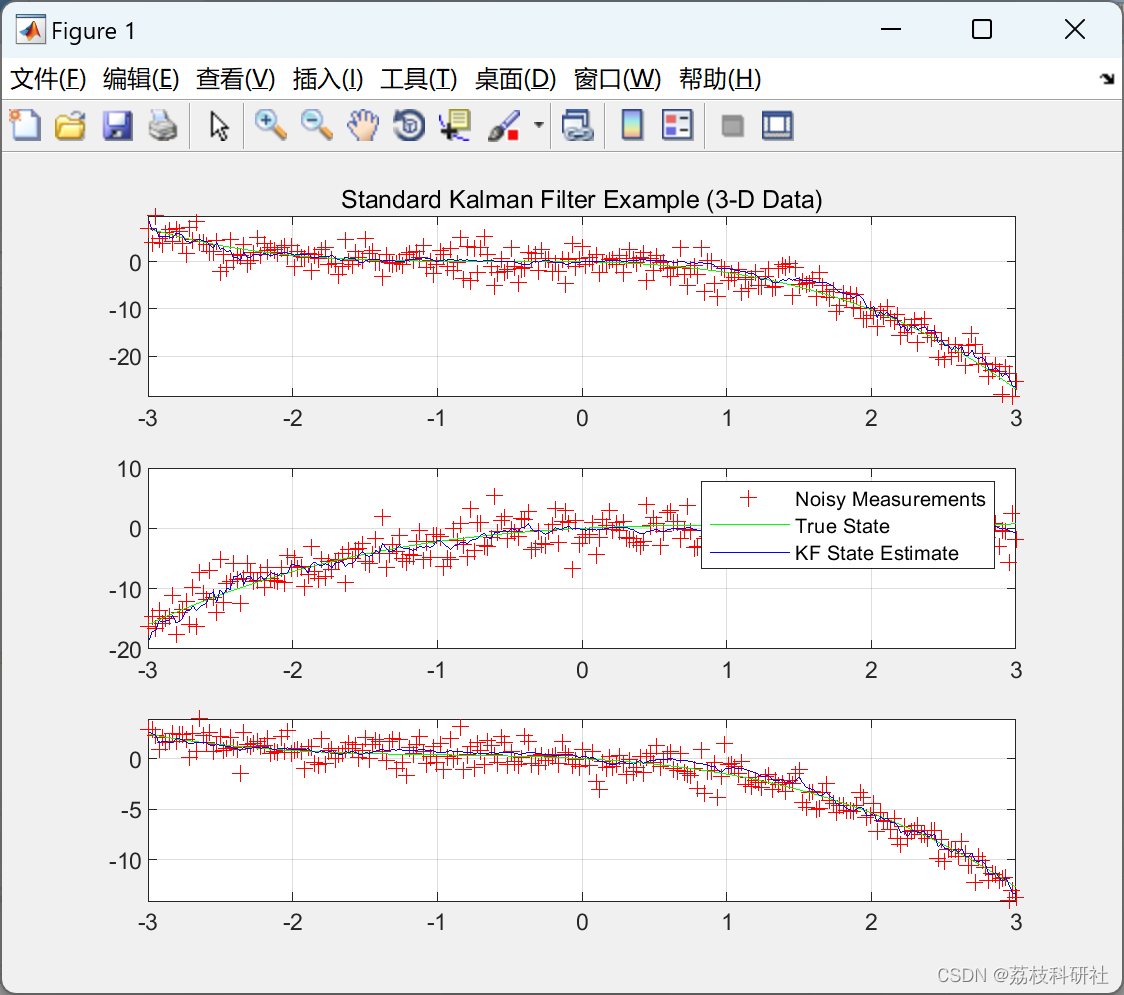
1) 标准卡尔曼滤波器 2) 扩展卡尔曼滤波器 3) 双卡尔曼滤波器 4) 平方根卡尔曼滤波器
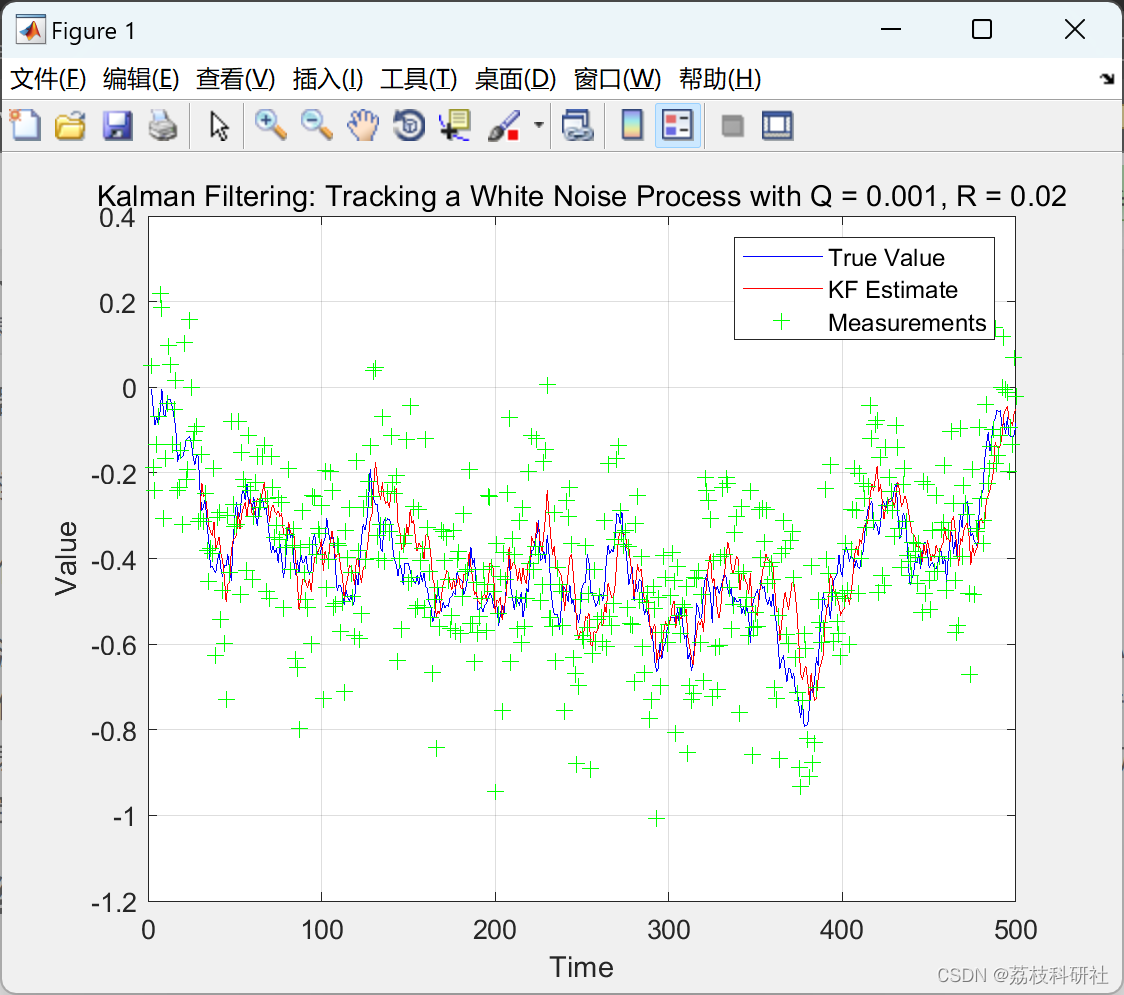
在所有 4 种情况下,KF 函数都接受多维系统的噪声样本作为输入,并根据噪声样本中固有的时变过程/噪声协方差生成真实系统状态的 KF 估计值。
指数加权(或未加权)移动平均线用于估计噪声测量的时变系统协方差。
标准卡尔曼滤波器是最基本的卡尔费休实现。它假设一个模型,即噪声测量包含真实的系统状态和白噪声。
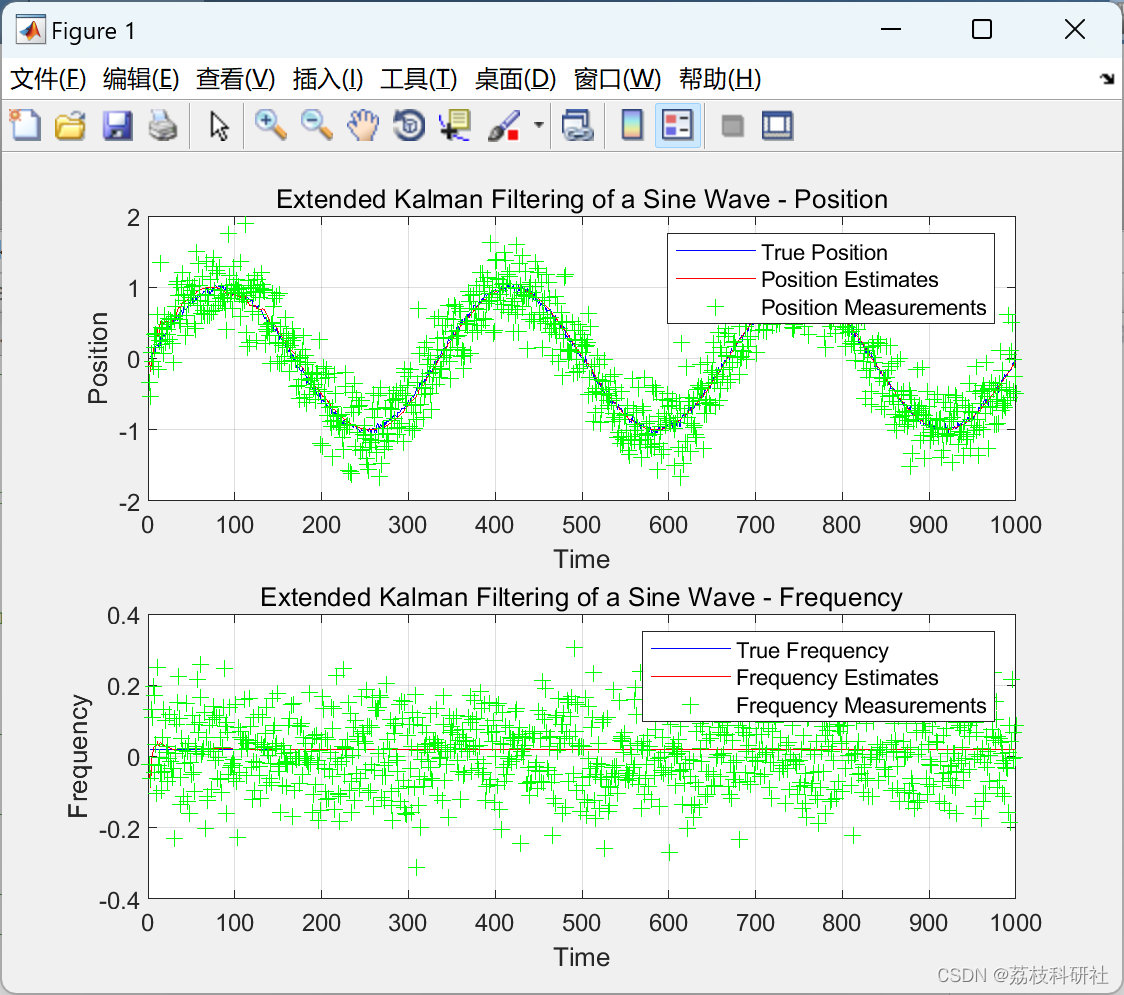
扩展卡尔曼滤波器是标准卡尔曼滤波器的推广,允许用户指定非线性系统模型,然后在 EKF 执行期间迭代线性化。
双卡尔曼滤波器同时解决了两个标准卡尔曼滤波器问题:
1) 将自回归模型拟合到数据并应用卡尔曼滤波来更新 AR 模型
2) 在执行标准 KF 更新之前,在每次迭代中应用 AR 模型
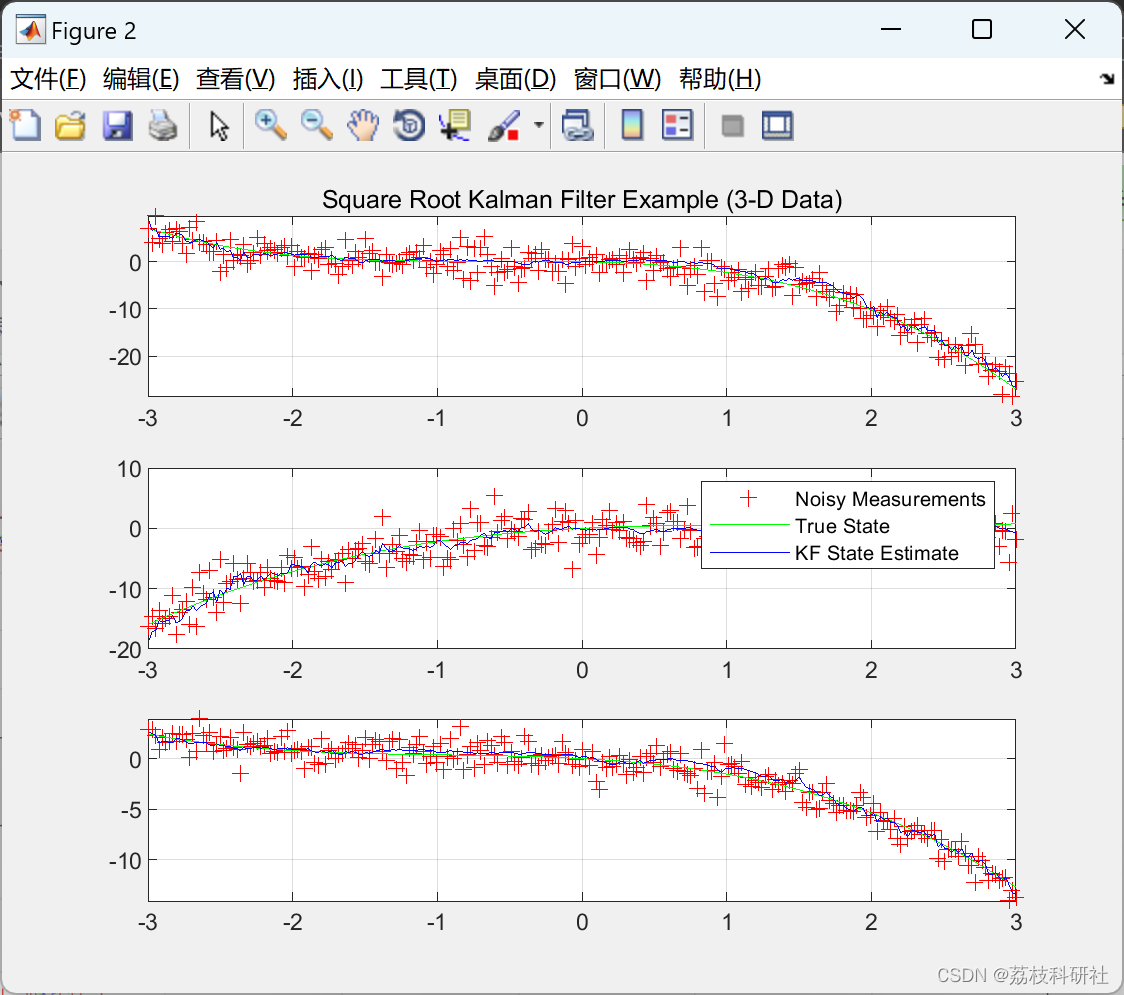
平方根卡尔曼滤波是执行标准/双卡尔曼滤波的更稳健且数值稳定的方法,尤其是当感兴趣的协方差矩阵条件不佳或几乎不是正定矩阵时。平方根卡尔曼滤波思想是以平方根形式 P = U D U' 传播过程误差协方差 P,其中 U 和 D 迭代更新,P 未显式计算。这样做将保证P是正定的,从而增加KF的数值稳定性。
📚2 运行结果


 部分代码:
部分代码:
% Number of iterations
N = 1000;
% True State
x = zeros(2,N);
% Apriori state estimates
x_apriori = zeros(2,N);
% Aposteriori state estimates
x_aposteriori = zeros(2,N);
% Apriori error covariance estimates
P_apriori = zeros(2,2,N);
% Aposteriori error covariance estimates
P_aposteriori = zeros(2,2,N);
% Measurements
z = zeros(2,N);
% Kalman Gain
K = zeros(2,2,N);
%--------------------------------------------------------------------------
%--------------------------------------------------------------------------
% Knobs to turn
%--------------------------------------------------------------------------
% True initial state
x(:,1) = [ 0 ;
3*pi/500 ];
% Initial aposteriori state estimate
x_aposteriori(:,1) = [ 1 ;
1*pi/500 ];
% Process noise covariance
Q = [ 0.001 0 ;
0 0 ];
% Measurement noise covariance
R = [ 0.1 0 ;
0 0.01 ];
end
%--------------------------------------------------------------------------
%--------------------------------------------------------------------------
% Plot Results
%--------------------------------------------------------------------------
figure
subplot(2,1,1)
% Actual state position
b = plot(2:N,x(1,2:N),'b');
hold on
% State position estimates
r = plot(2:N,x_aposteriori(1,2:N),'r');
% State measurements
g = plot(2:N,z(1,2:N),'g+');
title('Extended Kalman Filtering of a Sine Wave - Position');
legend([b r g],'True Position','Position Estimates','Position Measurements');
xlabel('Time')
ylabel('Position')
grid on
subplot(2,1,2)
% Actual state frequency
b = plot(2:N,x(2,2:N),'b');
hold on
% State frequency estimates
r = plot(2:N,x_aposteriori(2,2:N),'r');
% Frequency measurements
g = plot(2:N,z(2,2:N),'g+');
title('Extended Kalman Filtering of a Sine Wave - Frequency');
legend([b r g],'True Frequency','Frequency Estimates','Frequency Measurements');
xlabel('Time')
ylabel('Frequency')
grid on
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]景仙林,魏永虎.自回归的卡尔曼滤波算法在UWB定位中的应用[J].地理空间信息,2023,21(05):117-119.
[2]李成城,马立森,田原,贾运红,贾曲,田伟琴,张凯.基于CLAHE与卡尔曼滤波的掘进机机载视频稳像算法[J].工矿自动化,2023,49(05):66-73.DOI:10.13272/j.issn.1671-251x.2022100002.
[3]岳兴春,彭勇,宋威,黄嘉诚,周钰琛.融合EMA和卡尔曼滤波的MEMS去噪研究与应用[J].仪表技术与传感器,2023(04):83-86+92.















 5968
5968











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









