



上篇博客主要介绍了Radiance Field辐射场和Rendering,最后还进行了NeRF和3DGS的对比,详情请看3DGS基础初了解(一)
本篇博客将重点介绍3DGS的一些原理性内容(不涉及具体原理推导和代码)
参考论文A Survey on 3D Gaussian Splatting
1 Basic
1.1 3DGS突破点
简而言之:在不依赖深度神经网络的情况下,实现实时、高分辨率的图像渲染
1.2 properties
- center (position) μ —— 位置
- 3D covariance matrix Σ —— 协方差矩阵 →决定形状和方向
- opacity α —— 不透明度 →所有属性都可以通过后传播来学习和优化
- color c —— 颜色 →由球形谐波来表示,依赖视图外观
2 Rendering
- objective目的 : generate an image from a specified camera pose
我在学习的时候是将NeRF与3DGS进行对比来理解3DGS到底“优”在何处,所以下面也将从NeRF开始
- NeRf : computationally demanding volumetric ray-marching , sampling 3D space points per pixel
- NeRF的drawback : high-resolution image systhesis fail to achieve real-time rendering, especially for platforms with limited computing resources
在了解3DGS具体是如何进行Rendering之前我先介绍几个基础的概念
- 前向映射(forward mapping):3D对象的每个点直接映射到2D屏幕空间,也就是光栅化(rasterization)
- 反向映射(backward mapping):从2D屏幕的像素出发,反向追踪到3D场景中的点,比如射线追踪(ray tracing)
- 体素渲染:沿着射线积分颜色和透明度,需要累积每个采样点的贡献
- splatting : 将3D点或者小体素投影到2D,形成覆盖区域的点或形状,然后混合颜色
接下来看图理解
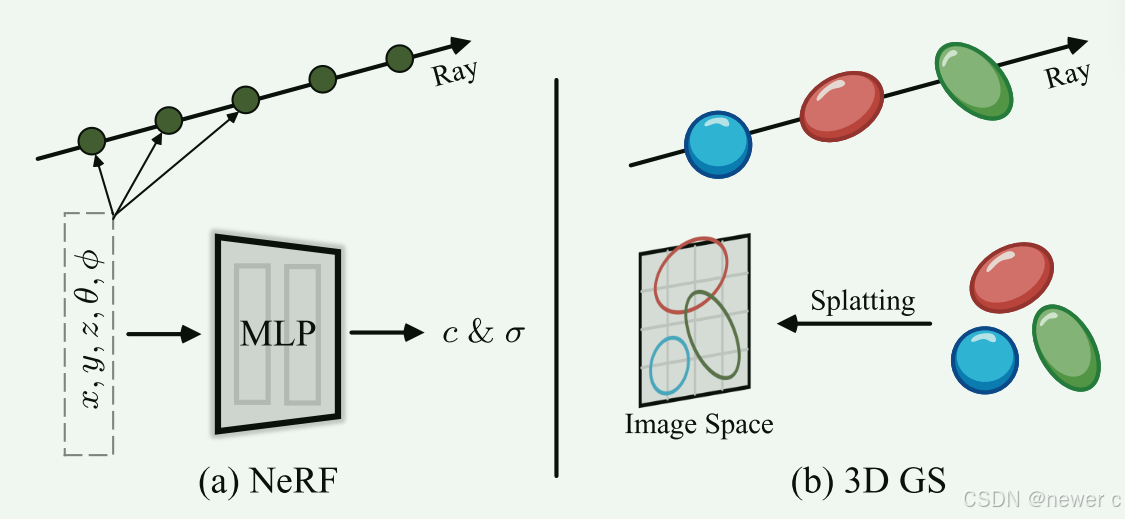
- NeRF 是如何得到最终像素的颜色呢?
→ 反向映射(Ray tracing)——NeRF对每个像素,发射一条射线到场景中,沿着射线采样多个点,每个点通过MLP计算出颜色和密度,然后通过体素渲染(volume rendering)将这些采样点的结果累积起来,得到最终像素的颜色 - 3DGS是如何得到最终像素的颜色呢?
→ 前向映射(Rasterization) → 颜色混合
前向映射的核心流程:
(1)Splatting : 3D高斯→椭圆
- 1️⃣将3D高斯从世界坐标转换为相机坐标
- 2️⃣splatting these Gaussians into 2D image place via an approximation of the projective transformation(投影变换)
计算表征投影的2D高斯的2D协方差矩阵∑’:其中,∑是3D协方差矩阵,描述了3DGS的空间分布;W是转换矩阵;J是投影变换的雅可比矩阵,描述局部线性近似
Σ
′
=
J
W
Σ
W
T
J
T
\Sigma ' = JW\Sigma W^TJ^T
Σ′=JWΣWTJT
- 3️⃣Rendering by Pixels : 给定像素的位置,通过视角变换矩阵W计算与所有重叠高斯的距离,形成排序表N,然后使用Alpha混合得到最终的颜色。
我初读这句话的时候每个字都认识但是连在一起就不知道讲什么,所以下面是我拆解这句话的解释(有点啰啰嗦嗦的,可以直接跳过)
- “通过视角变换矩阵W计算与所有重叠高斯的距离” : 通过视角变换矩阵W,把每个3D高斯的位置转换成相机视角下的目标,得到他们到相机的深度(即距离)。讲人话就是:把3D场景里的物体位置转换成**“距离相机多远”**的数据
- 怎么“形成排序表N”? 把所有覆盖这个像素的高斯按距离排序,生成一个由近到远(或由远到近)的列表(N)
下面的公式是权重的计算:权重表示该高斯对当前像素的颜色贡献强度,随距离高斯中心越远而指数衰减。
α
n
′
=
α
n
×
e
x
p
(
−
1
2
(
x
′
−
μ
n
′
)
T
Σ
n
′
−
1
(
x
′
−
μ
n
′
)
)
α_n' = α_n × exp(-\frac{1}{2}(\mathbf{x} '-\mathbf{μ}_n' ) ^T\Sigma '^{-1}_n(\mathbf{x}'-\mathbf{μ}_n') )
αn′=αn×exp(−21(x′−μn′)TΣn′−1(x′−μn′))
在上面的公式中,x’n和μ’n是投影空间中的坐标
- 使用Alpha混合怎么算颜色?从最远的高斯开始逐个叠加颜色,同时考虑它们的透明度(越透明的高斯对最终的颜色影响越小)
下面的公式进行颜色混合的计算:
C
=
∑
n
=
1
∣
N
∣
c
n
α
n
′
∏
j
=
1
n
−
1
(
1
−
α
j
′
)
C=\sum_{n=1}^{|\mathcal{N}|} c_{n} \alpha_{n}^{\prime} \prod_{j=1}^{n-1}\left(1-\alpha_{j}^{\prime}\right)
C=n=1∑∣N∣cnαn′j=1∏n−1(1−αj′)
在上面公式中连乘项表示将所有前面高斯的“未被遮挡比例”(1-wj)连乘,得到当前高斯能“透过”高斯的剩余可见性。
讲的通俗易懂就是:当计算后面高斯的颜色贡献时,必须考虑前面高斯的不透明度,因为前面高斯可能部分遮挡后面高斯。如果前面高斯的α值高,那么后面高斯的可见部分就会减少。
Parallel Rendering 并行渲染
避免为每个像素推导高斯分布的成本计算,3DGS将精度由像素级转移到面片级细节(from pixel-level to patch-level detail)
下图引用自论文A Survey on 3D Gaussian Splatting,该图完整地展现了整个forward process

- (a)splatting过程,详细解析可会看前面
- (b)divides the image into multiple non-overlapping patches:每个3D高斯投影到屏幕后,会覆盖一定的像素区域(椭圆泼溅)。根据其覆盖的像素范围,将高斯分配到可能重叠的图块中。
- (c)3D GS replicates the Gaussians which cover several tiles, assigning each copy an identifier, i.e., a tile ID.
- (d)By rendering the sorted Gaussians, we can obtain all pixels within the tile. Note that the computational workflows for pixels and tiles are independent and can be done in parallel.
按照我的理解(啰哩吧嗦):3D Gaussians是一个个小椭球,Image Space相当于是墙,将一个个椭球往墙上扔,留下的痕迹就是图(b)中的左边的小图,然后将墙面切割成4个Tiles,接着就知道每个椭球会分别在哪几个Tiles中,罗列出来就是图(c)中的左边。因为我的处理是处理Tiles,所以根据深度的顺序将同一个Tile的“ID Card”(我将一个标有Tile X : Depth的方框理解为一个“ID Card”)进行整理排序可以得到图(c)中的“Sorted 2D Gaussians”。然后对一个Tile内的每个像素进行并行计算颜色(Parallel Rendering),最后将所有处理完的结果合并就形成完整图像。(如果该理解有错误,请各位佬评论区指正🫡)
这里最精彩的部分就是并行处理:
- 图块级并行:每个图块独立处理:不同图块的计算流程互不依赖,GPU可以同时处理多个图块(如同时处理图块A、B、C)
- 像素级并行:每个像素独立计算:在一个图块内的所有高斯按深度排序后形成一个列表,但排序过程仅在局部进行(不影响其他图块)
- 高斯排序的并行优化:每个图块内的所有高斯按深度排序后形成一个列表
3 Optimization
3DGS的核心:lies an optimization procedure devised to construct a copious collection of 3D Gaussians 旨在构建大量的3D高斯集合的优化程序
- 如何进行Parameter Optimization
- Loss Function : be optimized by stochastic gradient descent(随机梯度下降) using the ℓ1 and D-SSIM loss functions (λ ∈ [0, 1] is a weighting factor)
L = ( 1 − λ ) L 1 + λ L D − S S I M \mathcal{L}=(1-\lambda) \mathcal{L}_{1}+\lambda \mathcal{L}_{\mathrm{D}-\mathrm{SSIM}} L=(1−λ)L1+λLD−SSIM - Parameter Update : Most properties of a 3D Gaussian can be optimized directly through back-propagation
- 补充:directly optimize the covariance matrix ∑ can result in a non-positive semi-definite matrix -> in order to circumvent this issue : 3DGS optimize a quaternion q(rotation) and a 3D vector s(scale)——这种方法将协方差矩阵∑重建如下:where R is the rotation matrix derived from the quaternion q, and S is the scaling matrix given by diag(s)
Σ = R S S T R T \Sigma =RSS^TR^T Σ=RSSTRT - To avoid the cost of automatic differentiation, 3D GS derives the gradients for q and s so as to compute them directly during optimization
4 Density Control
4.1 Initialization
- starts with the initial set of sparse points from SfM or random initialization
- 初始化对于convergence and reconstruction quality很重要
- control the density of 3D Gaussians : point densification and pruning(下面将会重点介绍)
4.2 Point Densification
- adaptively increase the density of Gaussians to better capture the details of a scene
- focuses on areas with missing geometric features or regions where Gaussians are too spread out
- It involves either cloning small Gaussians in under-reconstructed areas or splitting large Gaussians in over-reconstructed regions(相当于缺就补,超就减)
- be performed at regular intervals —— focusing on those Gaussians with large view-space positional gradients (i.e., above a specific thresh-old)
- 目的:寻求高斯在3D空间中的最佳分布和表示,提高整体重建的整体质量
4.3 Point Pruning
- regularization process : involves the removal of superfluous or less impactdul Gaussians
- eliminating Gaussians that are virtually transparent (with α below a specified threshold) and those that are excessively large in either world-space or view-space
- prevent unjustified increases in Gaussian density near input cameras : the alpha value of the Gaussian is set close to zero often a certain number of iterations
- 目的:control the density of Gaussians,节省计算资源,确保模型中的高斯模型对场景的表示保持精确有效

















 1339
1339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









