






引言:从模块化到端到端的范式转移
在汽车工业百年发展史上,2020年代正见证着最具颠覆性的技术革命——智能驾驶系统正从传统"感知-决策-控制"的模块化架构,向基于深度学习的端到端(End-to-End)架构快速演进。这种范式转移不仅重构了自动驾驶技术栈,更将重塑整个汽车产业的竞争格局。特斯拉在2023年推出的FSD V12版本,首次实现了完全基于神经网络的驾驶决策,标志着端到端智能驾驶技术正式进入商业化前夜。本文将深入解析这一技术体系的核心逻辑、关键技术突破及未来演进方向。
第一章 端到端智能驾驶的基本概念
1.1 定义与核心特征
端到端智能驾驶(E2E Autonomous Driving)是指通过单一深度学习模型,直接将传感器原始数据映射为车辆控制指令的技术范式。其核心特征表现为:
-
数据驱动:完全依赖海量驾驶数据训练,而非人工规则编程
-
全局优化:感知、预测、决策在统一模型中进行联合优化
-
涌现智能:通过自监督学习获得超越人类设计规则的行为模式
1.2 与传统架构的本质差异
传统自动驾驶系统采用模块化架构(图1):
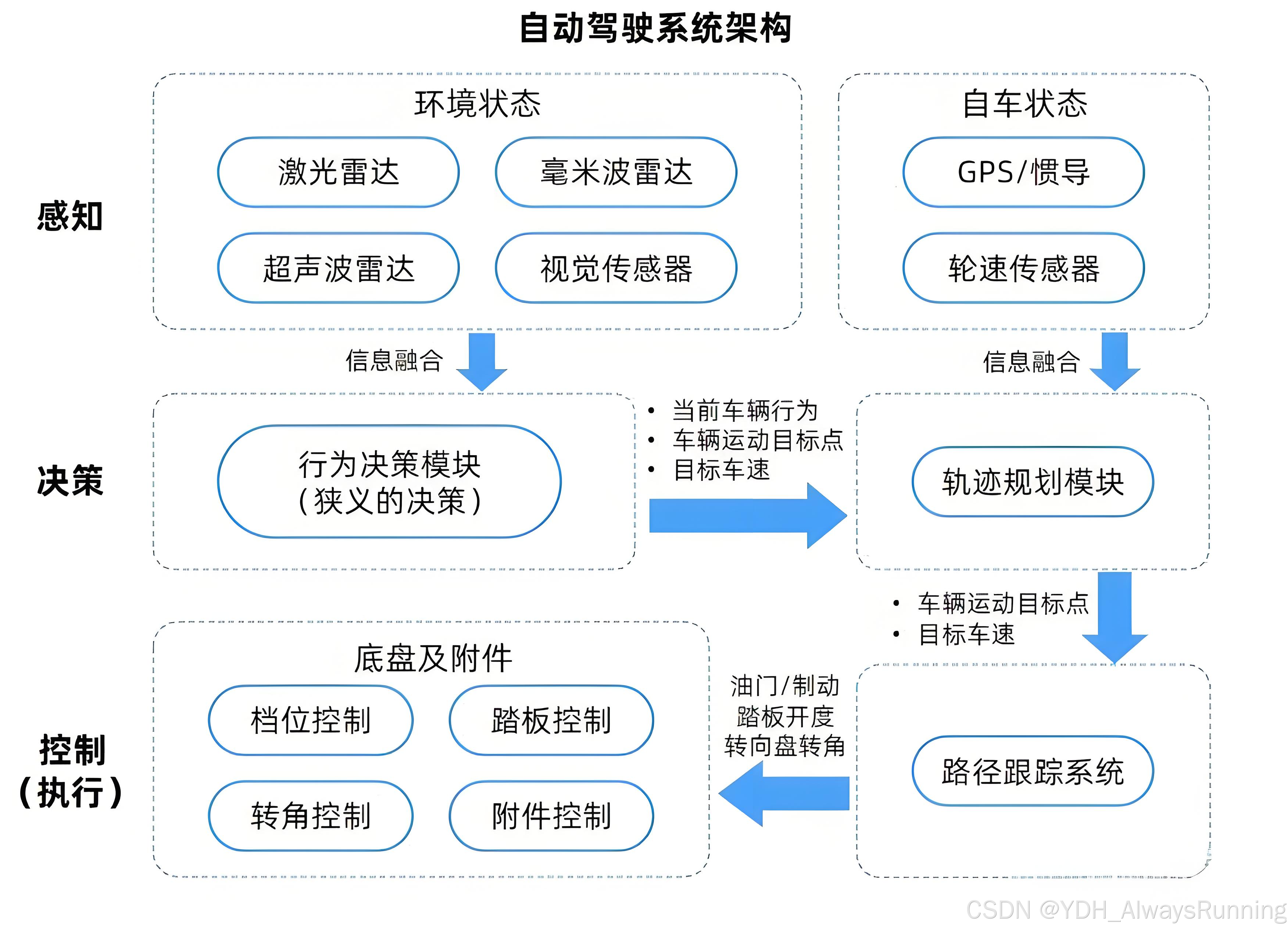
每个模块独立开发,依赖人工特征工程,存在误差累积和场景泛化瓶颈。
端到端架构(图2)则构建统一模型:
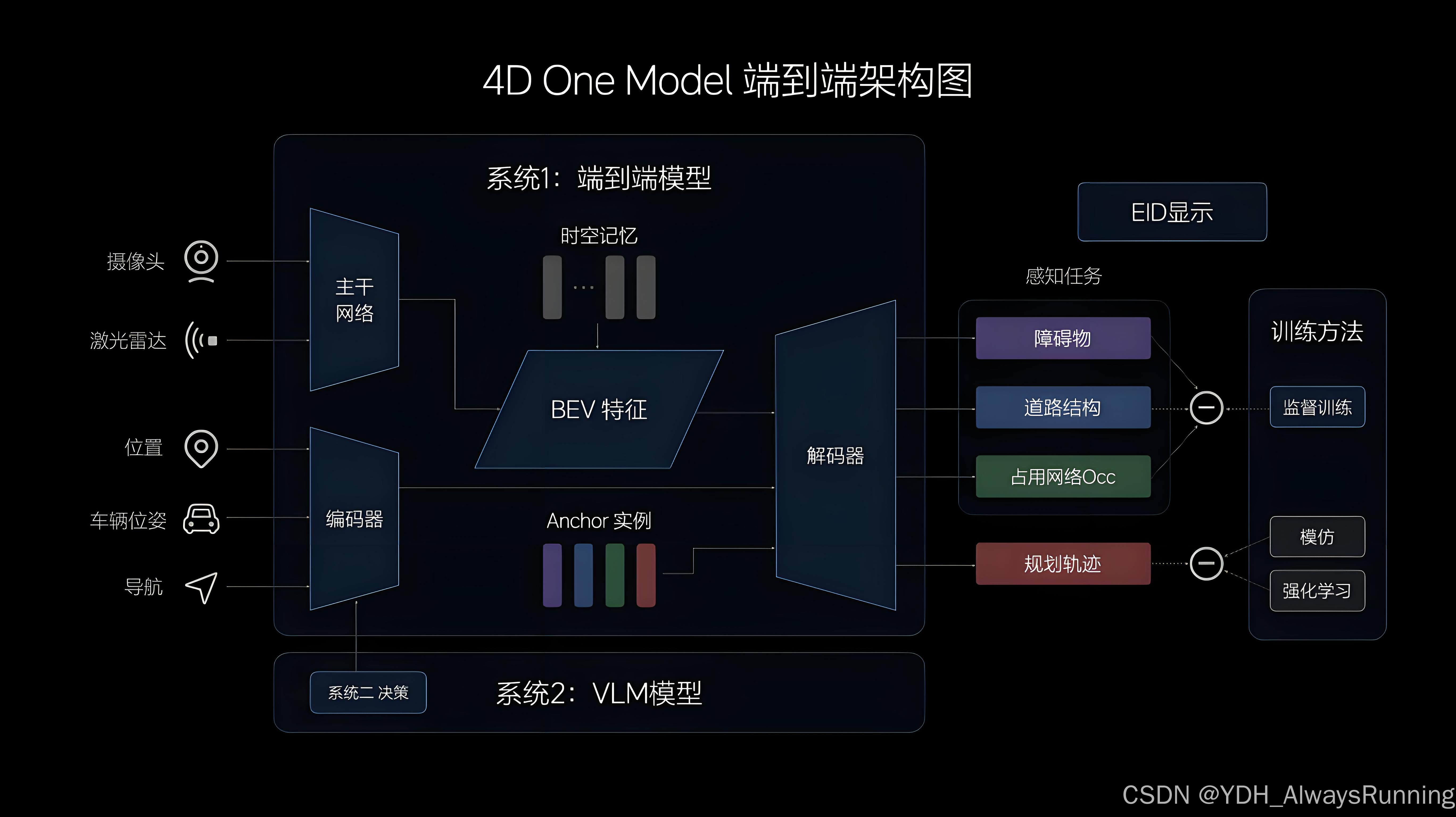
通过端到端优化,直接建立"像素到扭矩"的映射关系,实现更高效的场景适应能力。
1.3 技术优势与挑战
优势:
-
减少模块间信息损失
-
提升长尾场景处理能力
-
降低系统复杂度和开发成本
挑战:
-
黑箱模型的可解释性问题
-
数据采集与标注的规模需求
-
功能安全认证的范式冲突
第二章 行业典型应用场景
2.1 乘用车辅助驾驶系统
-
特斯拉FSD:采用纯视觉方案,2023年实现城市道路端到端驾驶
-
小鹏XNGP:基于BEV+Transformer架构,支持无高精地图城市导航
-
华为ADS 2.0:融合激光雷达点云与视觉特征的多模态系统
2.2 无人驾驶出行服务(Robotaxi)
-
Waymo Driver:基于5代硬件迭代的L4级系统,累计路测超2000万英里
-
Cruise Origin:取消方向盘的全无人驾驶车辆,专为共享出行设计
-
百度Apollo RT6:成本降至25万元级的L4量产车,2023年落地广州
2.3 特定场景自动驾驶
-
港口物流:西井科技Q-Truck实现24小时无人化集装箱运输
-
矿区运输:踏歌智行露天矿无人驾驶方案提升效率40%
-
末端配送:新石器无人配送车日均完成5000单社区配送
第三章 技术体系与核心组件
3.1 硬件架构演进
传感器配置:
-
视觉主导派:8摄像头+4D毫米波雷达(特斯拉方案)
-
多模态融合派:激光雷达+摄像头+毫米波雷达(蔚来ET7)
-
事件相机:索尼IMX636动态视觉传感器,解决高速运动模糊
计算平台:
-
英伟达Thor:2000TOPS算力,支持Transformer模型加速
-
地平线征程6:128TOPS能效比达153TOPS/W
-
特斯拉Dojo:自研D1芯片构建的超级计算集群
3.2 软件算法突破
感知革命:
-
BEV(鸟瞰图)感知:将多相机输入统一到三维空间表征
-
Occupancy Network:动态构建三维占据栅格,替代传统障碍物检测
-
NeRF技术:从2D图像重建高精度三维场景
决策范式:
-
模仿学习:通过人类驾驶数据克隆行为策略
-
强化学习:在仿真环境中优化长期收益函数
-
大语言模型:将驾驶任务转化为自然语言推理问题
3.3 数据闭环体系
-
影子模式:特斯拉每天收集1600亿帧真实驾驶视频
-
场景引擎:Waymo的Carcraft仿真平台支持每日2500万次虚拟测试
-
自动标注:毫末智行MANA体系实现98%标注自动化率
第四章 关键技术深度解析
4.1 Transformer架构
-
时空序列建模:通过自注意力机制捕捉道路要素的时空关联
-
多模态融合:统一处理视觉、雷达、语言等多源输入
-
模型蒸馏:将大规模基础模型压缩至车端可部署规模
4.2 世界模型(World Model)
-
神经渲染:NeRF技术构建动态场景数字孪生
-
物理推理:Graph Network预测交通参与者的交互行为
-
认知映射:将驾驶知识编码为可解释的语义图层
4.3 安全验证体系
-
形式化验证:使用数学方法证明系统安全边界
-
对抗训练:注入对抗样本提升模型鲁棒性
-
安全岛设计:硬件级隔离确保控制指令的确定性
第五章 技术发展趋势
5.1 多模态大模型驱动
-
视觉语言模型:CLIP架构实现开放场景语义理解
-
具身智能:将驾驶任务纳入通用人工智能训练框架
-
知识蒸馏:将GPT-4的推理能力迁移到车载模型
5.2 车路云协同进化
-
5G-V2X:实现200ms级时延的群体智能决策
-
边缘计算:路侧单元实时提供上帝视角环境感知
-
联邦学习:跨车企数据协同训练不泄露隐私
5.3 轻量化部署创新
-
神经架构搜索:自动生成适应车载芯片的模型结构
-
混合精度计算:FP8量化技术保持精度降低功耗
-
存算一体芯片:打破"内存墙"提升计算效率
5.4 安全与伦理突破
-
因果推理:建立可解释的决策逻辑链条
-
道德建模:构建符合人类价值观的紧急避险策略
-
数字身份:区块链技术确保数据主权归属
第六章 产业影响与未来展望
6.1 重塑汽车产业价值分配
-
软件价值占比将从当前15%提升至2030年的60%
-
车企核心竞争力转向数据资产与算法迭代能力
-
Tier1供应商向"软件定义硬件"模式转型
6.2 催生新型商业模式
-
里程订阅制:按实际使用量支付自动驾驶服务费
-
功能即时开通:通过OTA远程激活预埋硬件能力
-
数据交易市场:合规驾驶数据成为可交易生产要素
6.3 社会效益与挑战
-
交通效率:预计可减少30%的城市交通拥堵
-
能源变革:协同智能驾驶提升电动车续航15%
-
伦理困境:事故责任认定面临法律体系重构
结语:通向完全自主的进化之路
当端到端智能驾驶系统在2025年突破"百万公里接管率"门槛,人类将见证机器驾驶能力首次系统性超越人类驾驶员的里程碑时刻。这场技术革命不仅意味着出行方式的颠覆,更预示着人工智能在物理世界的真正觉醒。在可见的未来,具备持续进化能力的自动驾驶系统,将推动汽车从"载具"进化为"移动智能体",开启人机共生的交通文明新纪元。

















 324
324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









