







项目介绍
技术:单片机、C语言等
摘要:
智能车辆是目前世界车辆研究领域的热点和汽车工业新的增长点。智能车辆是含括了自动化、传感、计算机、通信、信息、导航人工智能等技术的一种高新技术综合体,可以实现环境感知、路径规划以及自动驾驶等。
本文设计了一个可以由红外遥控器操控并且可以能够可以自动寻迹的智能小车控制系统。以STC90C516RD+为单片机的控制核心,利用VS1838B红外接收头将遥控器的红外发射信号转化为单片机可识别的数字信号,通过控制直流电机不同的转动状态,实现遥控器对小车的前进、后退、左转、右转的操控;同时,也利用位于车前底部的ST188三路传感器,检测地面的黑线情况,通过所接受地面反射光的不同状态而产生的不同电信号,使其能够按照既定黑线的轨迹寻迹行驶。
以此作为研究基础,可以设计出在军事、民用和科学研究等方面应用的智能机器人,对解决交通安全问题提供一种新的途径。
关键字
STC90C516RD+,红外解码,pwm调速,直流电机,黑线寻迹
效果图


目录:
毕业设计(论文)任务书 I
摘要 IV
Abstract: V
1 引言 1
1.1 绪论 1
1.2 智能小车的研究意义 2
1.3 可行性分析 2
2 系统概要设计 3
2.1 总体方案设计 3
2.2 方案选择论证 3
2.2.1 遥控检测系统 5
2.2.2 循迹检测系统 5
2.3 电机驱动系统 6
2.4 电机驱动芯片 7
2.5 显示模块 8
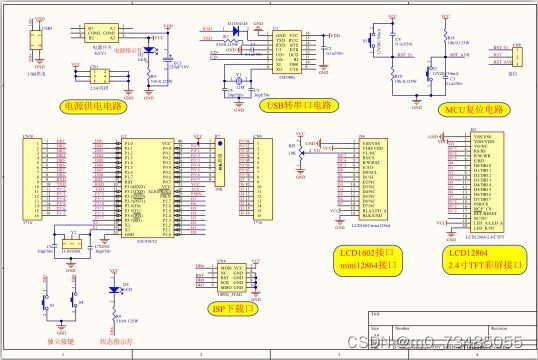
3 硬件选型与设计 10
3.1 主控芯片性能 10
3.1.1 单片机的外部结构: 14
3.1.2 单片机内部 I/O 部件: 16
3.1.3 单片机内部软件硬件: 18
3.2 红外遥控模块 19
3.2.1 红外遥控 19
3.2.2 红外接收 21
3.3 红外循迹传感器模块 23
3.4 电源管理 24
3.5 电机及驱动模块 25
3.5.1 电机驱动 25
3.5.2 PWM调速 27
3.6 液晶显示模块 29
4 软件设计 31
4.1 遥控模块算法思想 32
4.2 遥控算法实现代码 33
4.3 循迹模块程序设计 35
4.4 循迹算法实现代码 36
5. 测试 38
5.1 测试项目 38
5.2 测试例程 38
5.2.1 红外遥控例程 38
5.2.2 黑线循迹例程 39
5.3 测试结果 40
6. 总结 42
主要参考文献(资料) 43
致谢 44
程序清单 45
外文翻译 48















 3464
3464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









