







 本文介绍了一种基于OpenCV的火灾烟雾识别系统,通过混合高斯模型进行目标检测和背景建模,利用HSI模型提取颜色特征,结合形态学操作和Sobel算子进行烟雾区域的检测。文章详细描述了数据集的创建、实验过程以及关键代码示例。
本文介绍了一种基于OpenCV的火灾烟雾识别系统,通过混合高斯模型进行目标检测和背景建模,利用HSI模型提取颜色特征,结合形态学操作和Sobel算子进行烟雾区域的检测。文章详细描述了数据集的创建、实验过程以及关键代码示例。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于OpenCV的火灾烟雾识别检测系统
设计思路
一、课题背景与意义
火灾是一种严重的灾害,对人类生命和财产安全造成巨大威胁。及早发现和准确识别火灾烟雾是预防和控制火灾的关键。而基于计算机视觉技术的火灾烟雾识别检测系统可以通过分析图像和视频数据,实时监测火灾烟雾的存在并发出相应的预警,帮助人们及时采取措施,减少火灾带来的损失。
二、算法理论原理
2.1 目标检测
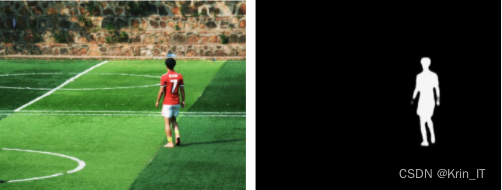
背景建模是一种计算机视觉和图像处理技术,用于提取图像或视频序列中的静态背景信息。混合高斯模型是常用的背景建模方法,它将背景表示为多个高斯分布的混合,通过对观测像素进行建模来区分背景和前景像素。混合高斯模型背景建模的核心思想是假设背景像素的灰度值可以由多个高斯分布来描述。通过学习和更新背景模型的参数,如均值和方差,可以适应场景中的变化。然后,通过与观测像素的概率密度值进行比较,将像素分类为背景或前景。这种方法可以应对场景中的光照变化和动态背景等复杂情况。
基于混合高斯模型的运动检测是一种常用的计算机视觉技术,用于检测图像或视频中的运动目标。下面是基于混合高斯模型的运动检测的一般流程:
- 初始化背景模型:首先,需要初始化一个背景模型,该模型由多个高斯分布组成。每个高斯分布代表一个像素位置的背景灰度值的可能性。初始时,可以将背景模型的所有高斯分布均设置为背景灰度值的初始估计。
- 观测帧的处理:针对每个输入的观测帧,首先进行背景建模,将像素根据与背景模型的差异进行标记为背景或前景。然后,对被标记为背景的像素进行模型更新,通过更新对应高斯分布的参数来适应场景变化。最后,根据像素的标记结果提取前景像素,生成前景掩码,用于表示运动目标的位置。
- 后处理和目标提取:对前景掩码进行后处理操作,如降噪、填充孔洞等,以得到更准确的运动目标区域。
2.2 特征提取
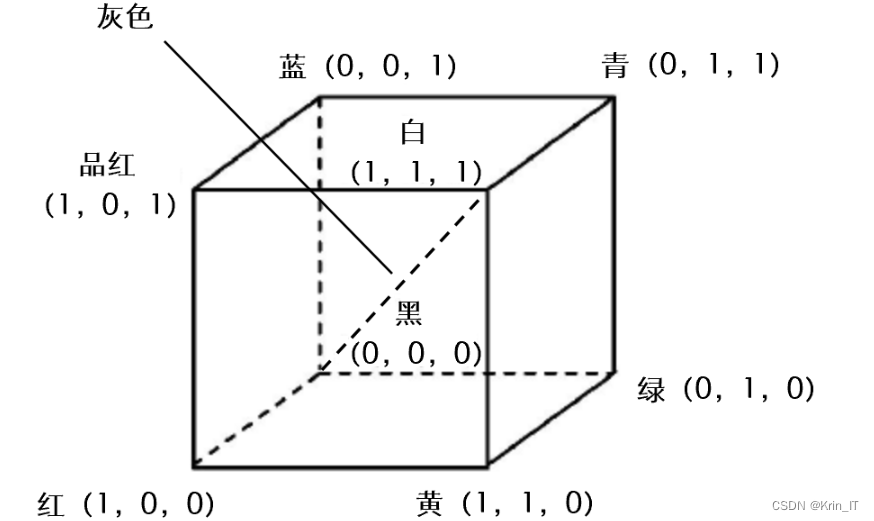
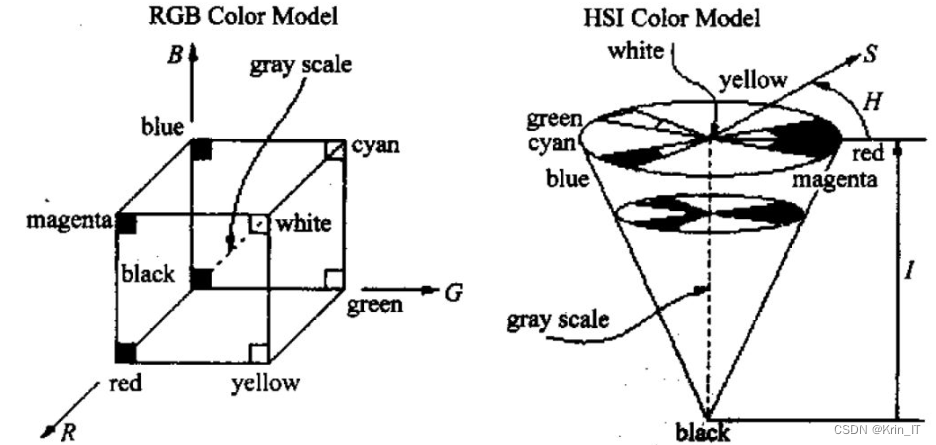
RGB模型是一种加法颜色模型,它使用红、绿和蓝三个基色的不同强度组合来表示各种颜色。在RGB模型中,颜色由三个分量的数值表示,每个分量的取值范围通常为0到255。RGB模型广泛应用于显示器、摄像头和数字图像处理等领域,因为它直接对应于光的三原色。HSI模型是一种色调、饱和度和强度的颜色模型。它将颜色的感知属性进行分离,色调表示颜色的基本色调属性,饱和度表示颜色的纯度或浓度,强度表示颜色的亮度。HSI模型在处理颜色信息时更接近人类对颜色的感知,并且能够更好地分离亮度和色彩信息。
烟雾通常会导致场景中的亮度变化。HSI模型将亮度(Intensity)作为一个独立的分量,可以更好地捕捉到亮度变化,使得烟雾的影响能够在亮度分量中得到体现。 烟雾的颜色特征可能与背景颜色不同。HSI模型中的色调(Hue)分量能够更好地描述颜色的基本属性,可以用来区分烟雾和背景的颜色差异。 HSI模型的饱和度(Saturation)分量可以表示颜色的纯度或浓度,对于分析烟雾的浓度或密度变化有一定的帮助。
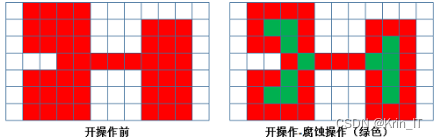
形态学中的腐蚀操作用于收缩前景区域并消除噪声点,提高疑似烟雾区域的边缘平滑性,去除独立于边缘的噪声点。膨胀操作用于扩张前景区域并增强边缘平滑性。在数字图像处理中,可以结合腐蚀和膨胀操作进行开运算和闭运算。开运算先进行腐蚀操作再进行膨胀操作,可以消除运动检测和颜色特征提取引起的独立噪声点,使得结果具有完整的外部轮廓、准确的边缘信息和良好的目标区域连通性。闭运算先进行膨胀操作再进行腐蚀操作,可以填补前景区域内部的空洞和孔洞,平滑边缘并连接不连续的目标区域。
基于形态学的疑似烟雾区域滤波方法通常采用开运算,即先进行腐蚀操作再进行膨胀操作。这种处理方法能够有效消除噪声点,提高疑似烟雾区域的准确性和连通性,有助于后续对疑似烟雾区域的动态特征提取和分析。
Sobel算子是一种常用的边缘检测算子,它通过计算图像中每个像素点的灰度值与其周围像素点之间的差异来获取边缘信息。Sobel算子分别对图像在水平和垂直方向进行卷积操作,得到水平方向上的边缘强度(Gx)和垂直方向上的边缘强度(Gy)。通过Sobel算子可以获取图像中疑似烟雾区域的边缘信息,即灰度变化较明显的像素点集合。利用这些边缘信息,可以计算出边缘的周长和区域内像素点的个数(面积)。然后,将周长和面积代入圆形度的计算公式,可以得到圆形度的值。
三、检测的实现
3.1 数据集
由于网络上没有现有的合适的数据集,我决定进行网络爬取和相机拍摄来收集相关数据。通过搜索火灾烟雾的图像和视频,我从多个公开的图片和视频网站爬取了大量的火灾烟雾场景数据,并进行了整理和标注。这个自制的数据集包含了各种火灾烟雾的样本图像和视频片段,涵盖了不同类型的火灾场景和烟雾情况。利用图像处理和数据增强技术,我对自制数据集中的火灾烟雾图像进行了旋转、翻转、缩放等操作,生成了更多的变体和扩充图像。此外,我还模拟了不同烟雾密度和火灾场景的情况,生成了更多的样本。

3.2 实验及结果分析
火灾烟雾识别检测系统的设计思路可以分为以下几个关键步骤:
- 图像采集:使用摄像头或其他图像采集设备获取监控区域的实时图像。这些图像将用于烟雾区域的分析和检测。
- 图像处理:对采集到的图像进行预处理,包括去噪、图像增强、颜色空间转换等操作,以提高后续烟雾区域检测的准确性和效果。
- 烟雾区域检测:利用图像处理技术和算法,对预处理后的图像进行烟雾区域的检测。可以使用基于灰度变化、纹理特征或边缘检测等方法来识别图像中的烟雾区域。
- 圆形度计算:对检测到的烟雾区域进行圆形度的计算。根据烟雾区域的周长和面积,可以利用相关公式计算圆形度的值。如果圆形度超过设定的阈值,则判定该区域为烟雾区域。
相关代码示例:
def filter_smoke_regions(image):
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 二值化处理
_, binary = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
# 形态学操作:开操作和闭操作
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
opened = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, kernel)
# 寻找轮廓
contours, _ = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制疑似烟雾区域
filtered_image = np.zeros_like(image)
for contour in contours:
area = cv2.contourArea(contour)
if area > 100: # 根据需要调整疑似烟雾区域的最小面积
cv2.drawContours(filtered_image, [contour], -1, (0, 255, 0), 2)
return filtered_image
# 读取图像
image = cv2.imread('smoke_image.jpg')
# 应用滤波方法
filtered_image = filter_smoke_regions(image)实现效果图样例:




创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 603
603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









