







Halcon中阈值二值化的算子众多,通常用得最多的有threshold、binary_threshold、dyn_threshold等。
第1种 .threshold是最简单的阈值分割算子,理解最为简单;。 .固定阈值。
第2种 binary_threshold是自动阈值算子,它可以自动选出暗(dark)的区域,或者自动选出亮(light)的区域,理解起来也没有难度。
对某些项目,材料反光 不一致。 用固定阈值可能就不稳定了。
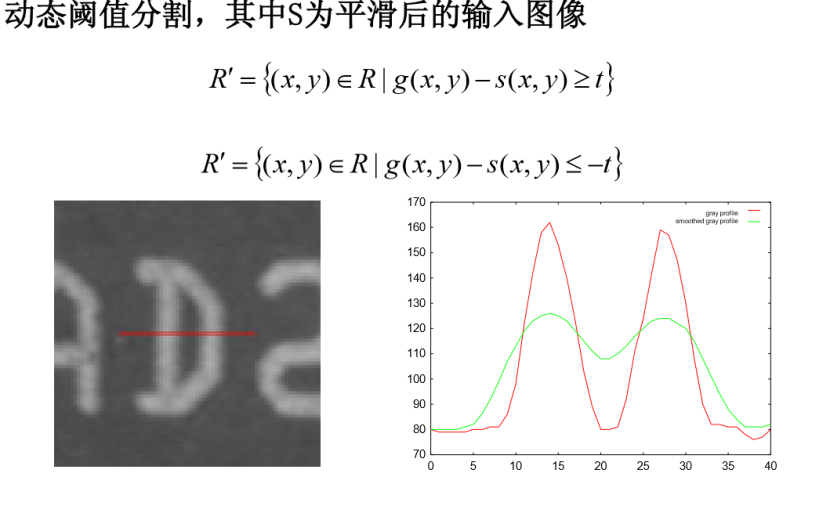
第3种 动态阈值算子
dyn_threshold.理解起来稍微复杂一点,使用dyn_threshold算子的步骤基本是这样的:
① 将原图进行滤波平滑处理。
② 用原图和平滑后的图逐个像素做比较,它可以根据参数分割出原图比平滑后的图灰度高(或者低)若干个灰度值的区域。(不是绝对值大于15),差值 ,明亮部分肯定是大于, dark ,肯定是小于。
第4种 Dual_threshold
第5种 Var_threshold
举例如下:
处理程序是这样的:
1 read_image (Image, 'C:/Users/happy xia/Desktop/dynPic.png')
2 mean_image (Image, ImageMean, 9, 9)
3 dyn_threshold (Image, ImageMean, RegionDynThresh, 10, 'dark')
程序分析:本例中,将图片模糊后,点阵字的黑色扩散了,随之就是字的黑色不如原图那么黑了,那么通过给定的限值“10”和“dark”,就可以将原图比模糊后的图暗10个灰阶以上的区域(即黑色文字部分)选出来了。
以上所说的三个算子并不是本文的重点,但却是理解下面的两个阈值分割算子的准备知识。
1、dual_threshold
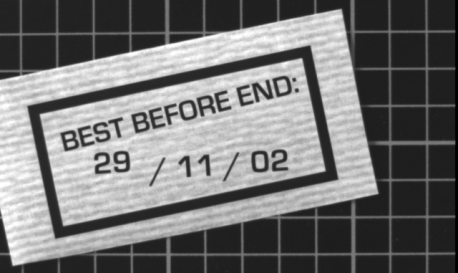
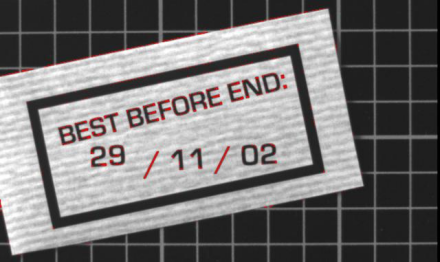
先看程序和效果图再分析。
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 dual_threshold (Image, RegionCrossings, 174, 200, 180)
dual_threshold(Image : RegionCrossings : MinSize, MinGray, Threshold : )
该算子签名中:Threshold 表示用于分割的阈值数值,MinSize表示分割出来的区域的最小面积(即数像素的数目个数),MinGray表示分割出来的区域对应的原图中图像像素的最高灰度不能低于MinGray设定值。
注意图中蓝色矩形小色块的面积是175个像素,因此当MinSize = 174时,它可以被分割出来。
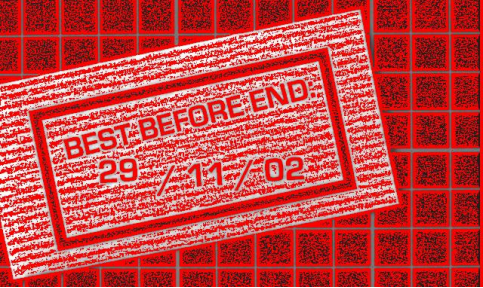
OK,我知道这么说比较拗口。下面我边改变参数边观察效果图,并做简要分析:
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 dual_threshold (Image, RegionCrossings, 176, 200, 180)
效果图如下:
由于最小面积设置为176,那么面积为175像素的矩形小色块就没有被分割出来。
再来改变MinGray参数:
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 dual_threshold (Image, RegionCrossings, 176, 216, 180)
此时观察到,最右边那个齿轮本来分割出来的区域没有了!
通过取色器观察可知,这块区域最亮的灰度大概比211高一点点。
我们把这个值略微调低再看看:
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 dual_threshold (Image, RegionCrossings, 176, 210, 180)
最右边那个齿轮右下角那一块又被分割出来了!
相信通过这样参数的反复调节,大家已经彻底明白了dual_threshold算子的意义和用法。
我们看这个算子的名称——dual是“双”的意思,也就是双阈值。如果我们让参数列表中的MinGray = Threshold,那就是单阈值了。
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 dual_threshold (Image, RegionCrossings, 176, 180, 180)
这个算子是很高效的。如果要完成上面这个程序这样的功能,用threshold算子的话,代码要这样写:
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
2 threshold (Image, Region, 180, 255)
3 connection (Region, ConnectedRegions)
4 select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 176, 9999999)
也就是说dual_threshold一条算子顶这三条算子。
dual_threshold算子的缺陷:它只能分割出灰度值高的亮区域,不能分割出灰度值低的暗区域。
下面介绍var_threshold算子。
2、var_threshold
先看var_threshold算子的签名:
var_threshold(Image : Region : MaskWidth, MaskHeight, StdDevScale, AbsThreshold, LightDark : )
MaskWidth、 MaskHeight是用于滤波平滑的掩膜单元;StdDevScale是标准差乘数因子(简称标准差因子);AbsThreshold是设定的绝对阈值;LightDark有4个值可选,'light'、'dark'、'equal'、'not_equal'。
需要强调的是var_threshold算子和dyn_threshold算子极为类似。不同的是var_threshold集成度更高,并且加入了“标准差×标准差因子”这一变量。
举例:
1 read_image (Image, 'C:/1.png')
2 var_threshold (Image, Region, 4, 4, 0.2, 12, 'dark')

在该程序中,先用4×4的掩膜在图像上逐像素游走,用原图中的当前像素和对应掩膜中16个像素的灰度均值对比,找出暗(dark)的区域。当原图像素灰度比对应的掩膜灰度均值低(0.2,12)个灰阶时,该区域被分割出来。本程序中StdDevScale = 0.2, AbsThreshold = 12,问题的关键就是理解如何通过StdDevScale和AbsThreshold来确定用于分割的阈值。
var_threshold的帮助文档中是这么写的:、

说明:
1、d(x,y)指的是遍历每个像素时,掩膜覆盖的那些像素块(本例中是4×4 = 16个像素)灰度的标准差;StdDevScale 是标准差因子。
2、当标准差因子StdDevScale ≥ 0 时,v(x,y) 取(StdDevScale ×标准差)和AbsThreshold 中较大的那个。
3、当标准差因子StdDevScale < 0 时,v(x,y) 取(StdDevScale ×标准差)和AbsThreshold 中较小的那个。实测发现,这里的比较大小是带符号比较,由于标准差是非负数,当StdDevScale < 0 时,(StdDevScale ×标准差)≤ 0恒成立。所以此时的取值就是(StdDevScale ×标准差)。
文档是这么说的:
If StdDevScale*dev(x,y) is below AbsThreshold for positive values of StdDevScale or above for negative values StdDevScale, AbsThreshold is taken instead.
大致意思是:
当StdDevScale为正时,如果StdDevScale*dev(x,y) 低于 AbsThreshold,则采用AbsThreshold。
当StdDevScale为负时,如果StdDevScale*dev(x,y) 高于 AbsThreshold,则采用AbsThreshold。
我找了一块黑白过渡处4×4的像素块,求得它的灰度标准差为51.16(或49.53):
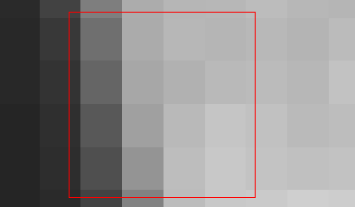
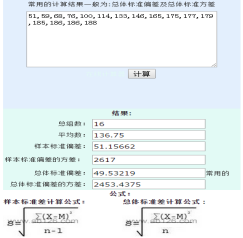
帮助文档中StdDevScale 的推荐值范围是-1~1,一般通过上面的例子可知,一般的明显的黑白过度处的标准差在50左右,乘以StdDevScale即-50 ~ 50 ,50的灰度差异,对于分割来说一般是够了的。
文档还说:推荐的值是0.2,如果参数StdDevScale太大,可能分割不出任何东西;如果参数StdDevScale太小(例如-2),可能会把整个图像区域全部输出,也就说达不到有效分割的目的。(……with 0.2 as a suggested value. If the parameter is too high or too low, an empty or full region may be returned.)
最后再看看是怎么分割像素的:
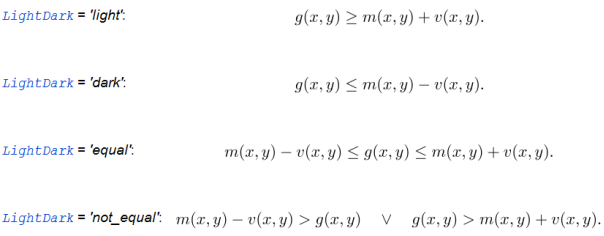
其中g(x,y)指的是原始图像当前像素的灰度值;m(x,y)指的是遍历像素时,掩膜覆盖的像素的平均灰度值(mean)。
以LightDark = ‘dark’为例,当满足m(x,y) - g(x,y) ≥ v(x,y)时(即原始图像对应像素灰度比掩膜像素灰度均值低v(x,y)个灰度值以上),相应的灰度值低的暗像素被分割出来。
最后看几个例子体会一下:(对比之前的例子var_threshold (Image, Region, 4, 4, 0.2, 12, 'dark')的效果)
① 将AbsThreshold 由12改成30,此时分割出的区域变小。
1 read_image (Image, 'C:/1.png')
2 var_threshold (Image, Region, 4, 4, 0.2, 30, 'dark')
② AbsThreshold 保持12不变,将StdDevScale由0.2改成0.7,此时分割出的区域变小。

③ 将参数改为var_threshold (Image, Region, 4, 4, -0.01, 12, 'dark'),此时分割出的区域大大增加,由前面的分析可知,此时参数AbsThreshold = 12无效,事实上,此时将AbsThreshold 改为1、50甚至200都对最终结果没有任何影响。
通过本人的分析,我认为StdDevScale取负值意义不大,因为它会分割出大量的不需要的区域,故一般推荐使用该算子时,StdDevScale取正值。
需要强调的是:在黑白过渡处,一般掩膜覆盖的像素的标准差较大,而在其他平缓的地方,标准差较小;因此最终采用的分割阈值随着掩膜在不断遍历像素的过程中,在(StdDevScale×标准差)和AbsThreshold 之间不断切换。
var_threshold和dyn_threshold的区别和联系:
dyn_threshold是将原图和滤波平滑后的图对比,var_threshold是将原图和对应像素掩膜覆盖的像素的平均灰度值对比。
在算子var_threshold中,如果参数StdDevScale = 0,那么就可以用动态阈值的方式非常近似地模拟。以下两种算法的效果极为类似:
1 read_image (Image, 'C:/1.png')
2 var_threshold (Image, Region, 4, 4, 0, 12, 'dark')
1 read_image (Image, 'C:/1.png')
2 mean_image (Image, ImageMean, 4, 4)
3 dyn_threshold (Image, ImageMean, RegionDynThresh, 12, 'dark')
两种方法的效果图:

那么当StdDevScale > 0 时,var_threshold对比dyn_threshold还存在什么优点呢?我认为是在黑白过渡处能减少分割出不需要的区域的概率。(因为黑白过渡处标准差大,当然前提是StdDevScale 不能设置得太小)。
作者:xh6300
出处:xh6300 - 博客园
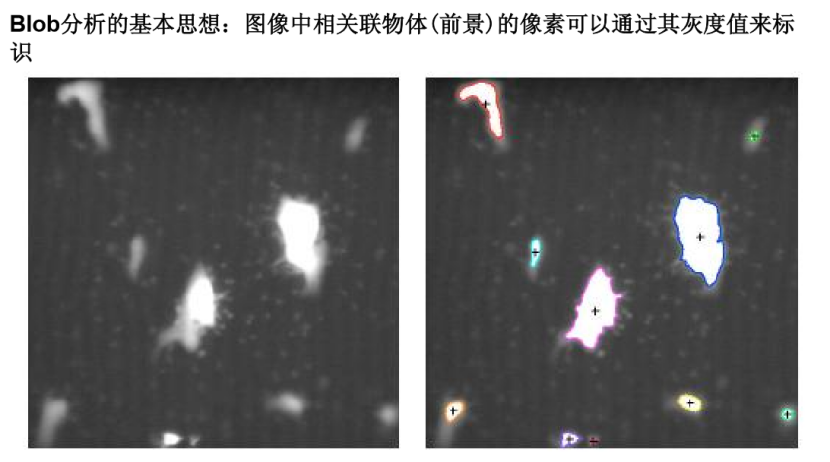
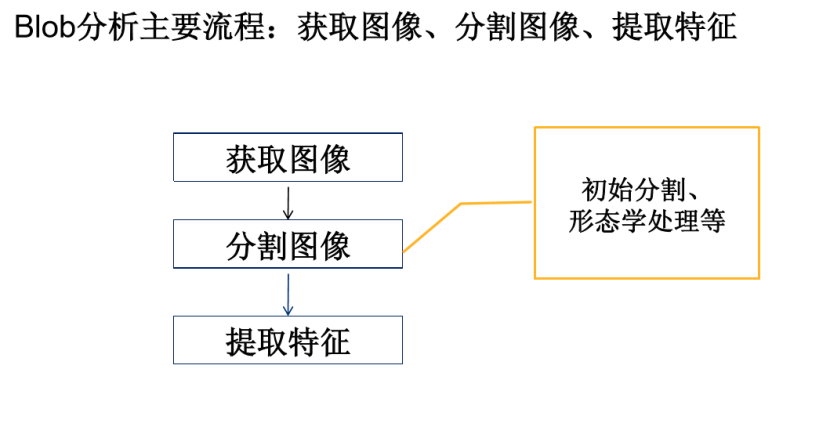
BLOB分析基础之一
一个简单的例子(非常理想的情况)
read_image (Image, ’particle’)
threshold (Image, BrightPixels, 120, 255)
connection (BrightPixels, Particles)
area_center (Particles, Area, Row, Column)
HALCON实际应用: Blob分析
threshold定义

• threshold算子HALCON中速度最快使用频率最高的分 割算法
• 如果目标体与背景之间存在灰度差,则threshold首先被 使用
• 如果环境稳定,阈值可在离线状态下 一次确定
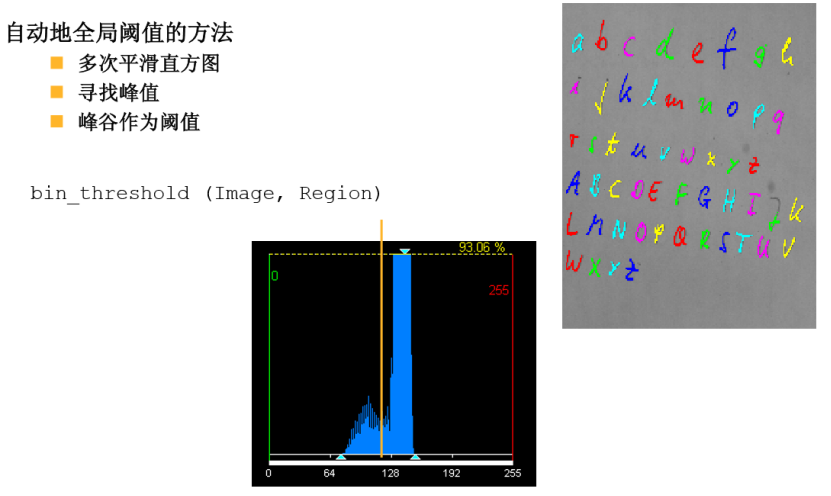
分割 : Binary Threshold
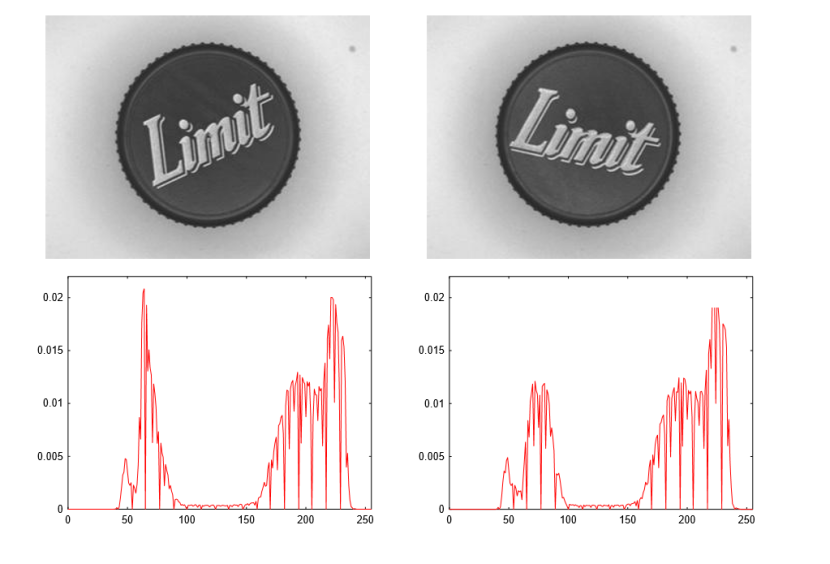
分割 : Histogram
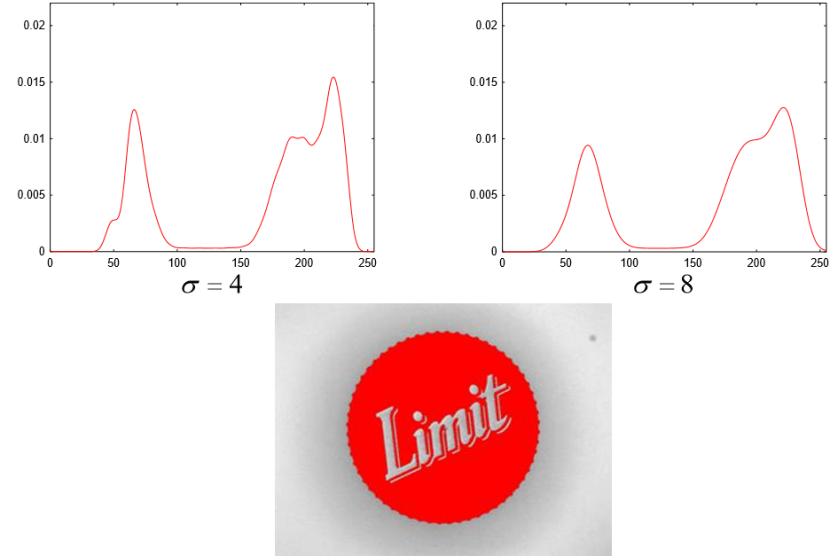
自动地全局阈值的方法
1.统计直方图 n
2.寻找出现频率最高的灰度值
3.把比最高灰度值小一定灰阶值的灰度值作为阈值
gray_histo (Image, Image, AbsoluteHisto, RelativeHisto)
PeakGray := sort_index(AbsoluteHisto)[255]
threshold (Image, Region, 0, PeakGray-25)
分割: 动态阈值
动态阈值分割
• 很多情况下由于背景不均一,无 法确定全局阈值
• 目标体经常表现为比背景局部亮 一些或暗一些
• 需要通过其邻域找到一个合适的 阈值进行分割
• 如何确定其邻域? 可以通过一些平滑滤波算子来确 定邻域,例如mean_image binomial_filter等
分割: 动态阈值
全局阈值与动态局部阈值的比较
滤波:接受(通过)或者拒绝一定频率的分量。
- 通过低频的滤波器成为低通滤波器 。
作用:均值滤波器 高斯滤波器。平均化处理,达到一个平滑的作用。
2.通过高频的滤波器 成为高通滤波器 。
作用:图像增强 去噪声 ,边缘检测 特征提取。 边缘部分灰度值 突变比较大
{
工程上根据输出端口对信号频率范围的要求,设计专门的网络,置于输入—输出端口之间,使输出端口所需要的频率分量能够顺利通过,而抑制或削弱不需要的频率分量,这种具有选频功能的中间网络,工程上称为滤波器。
}
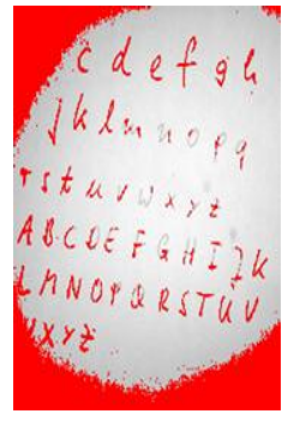
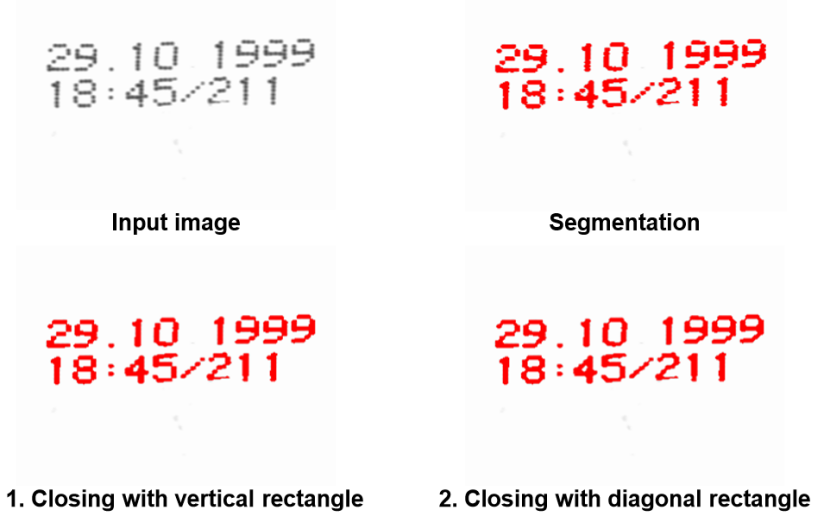
动态局部阈值 –通过均值滤波确定邻域 –滤波器mask尺寸大于字符笔画的宽度 –选择所有比其邻域暗的像素
mean_image (Image, ImageMean, 21, 21)
dyn_threshold (Image, ImageMean, Region, 15, 'dark')

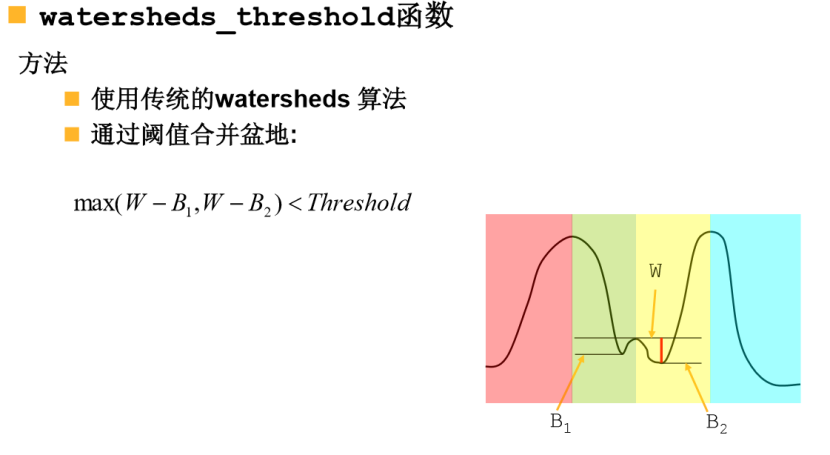
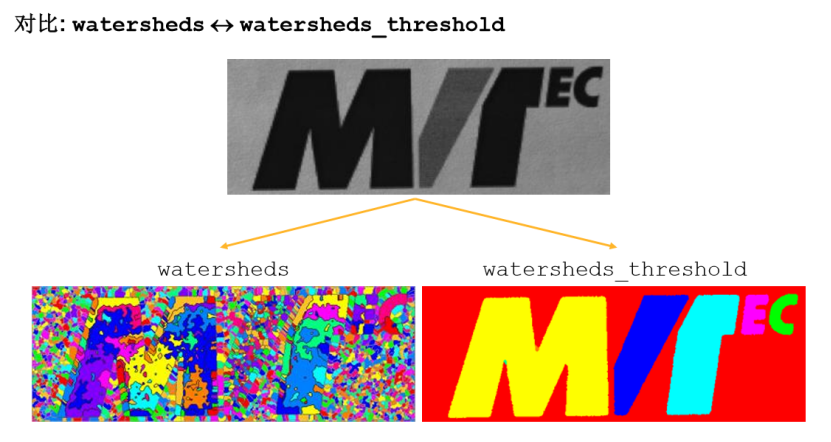
Watershed 分割
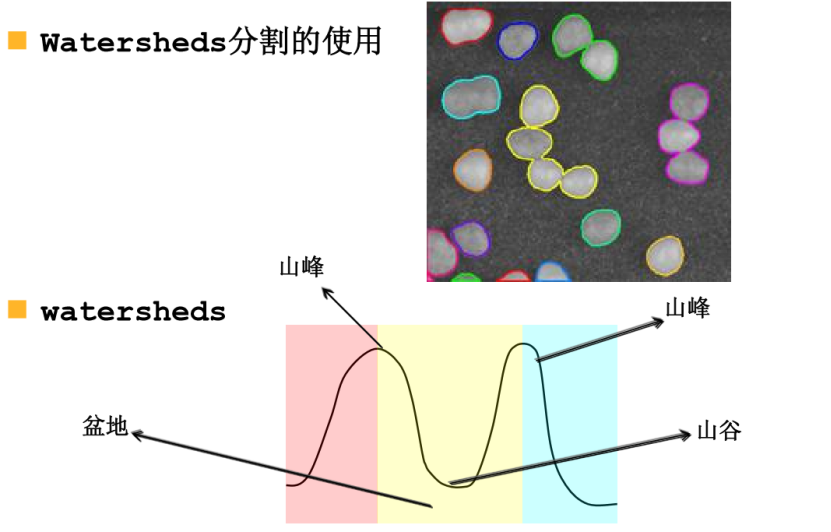
进一步地 Watershed Segmentation
logoWatershed: 示例
形态学处理
•分割之后,往往需要对区域做进一步处理才能满足要求
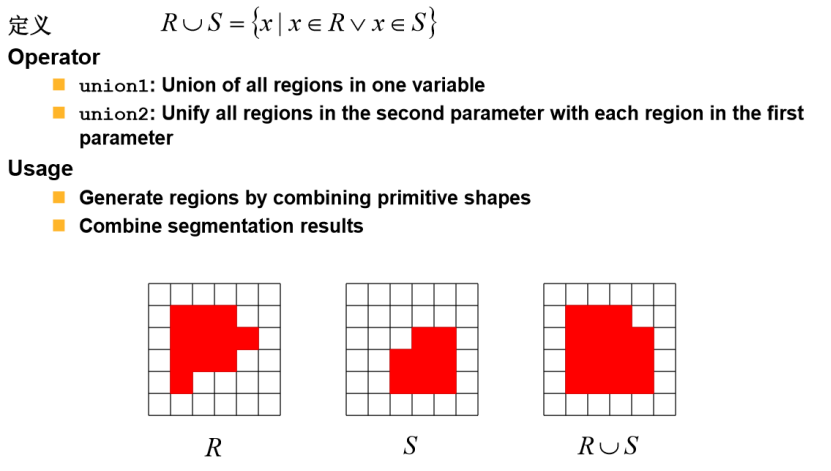
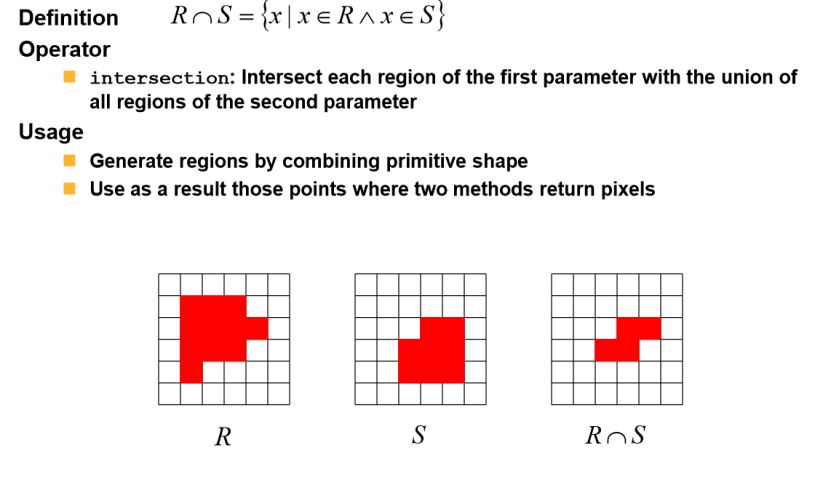
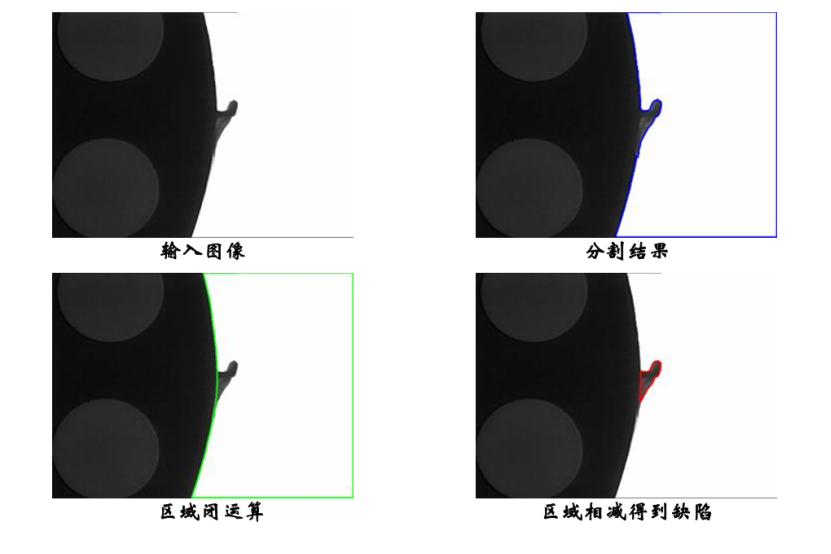
•常用形态学相关算子 connection, select_shape, opening_circle, closing_circle, opening_rectangle1, closing_rectangle1, difference, intersection, union1, shaps_trans, fill_up
•高级算子 boundary, skeleton等
连通区域 connetion
阈值分割后,需要提取目标物体,为了提取目标物体不得不先找到连通区域 n
提取连通域的关键是领域搜索的类型 n
在Halcon所有的案例中8领域法是默认的
HALCON的特点之一 n
任意的结构元素 n
任意尺寸的结构元素 n
非常有效的处理 n
巨大的算子集合: 44个算子 n
经典算子 n Erosion, dilation, opening, closing
高级算子 n top-hat, bottom-hat, hit-or-miss, boundary
特殊算子 n Fitting, pruning, thickening, thinning, skeleton
形态学示例:
Union
--Intersection
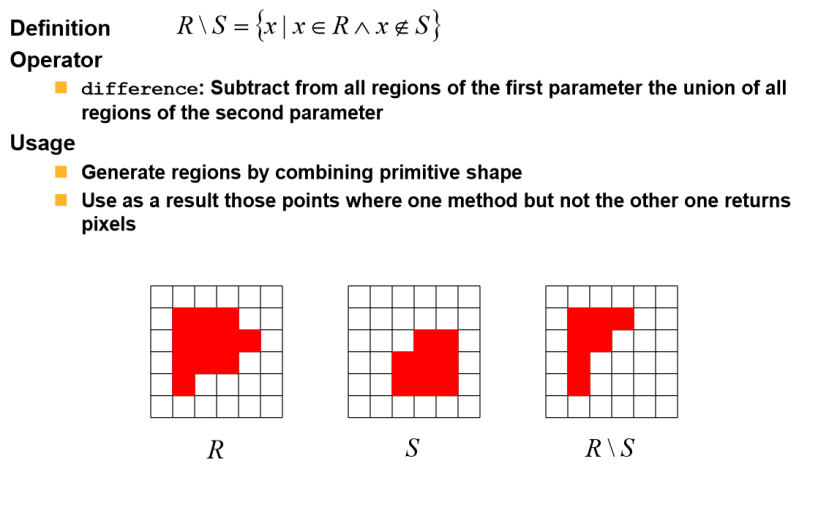
Difference
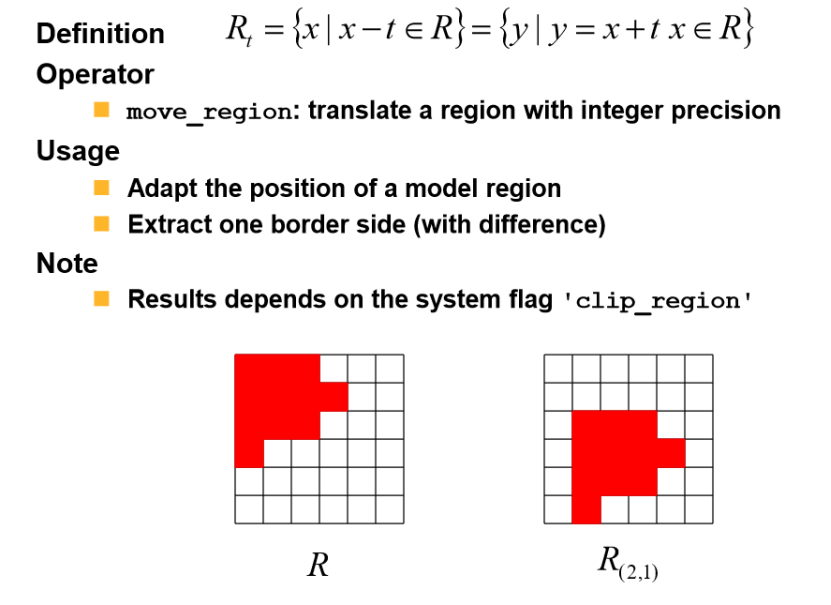
Translation
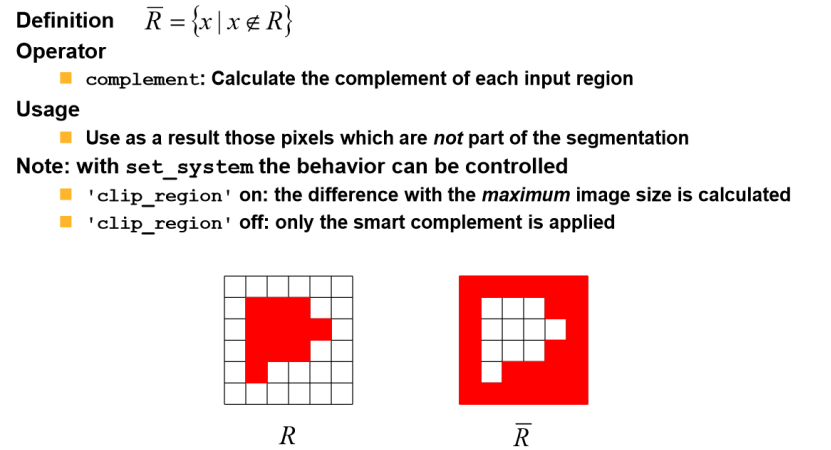
Complement
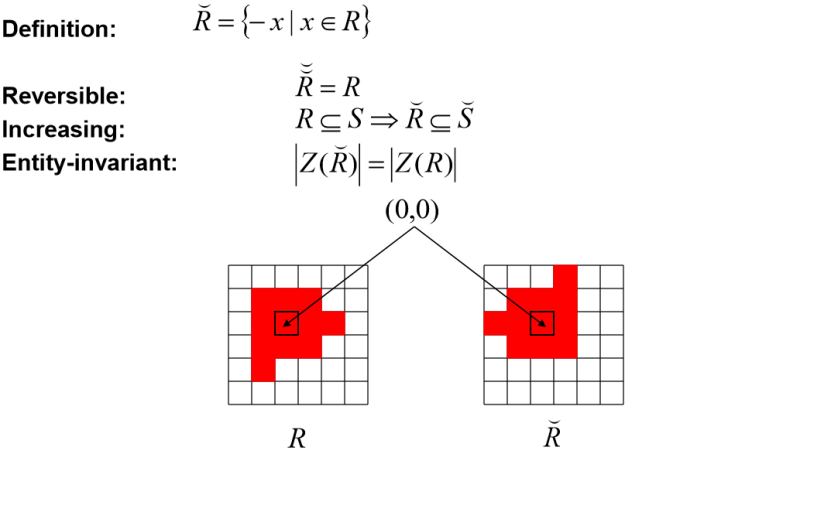
Transposition
Dilation
Example: Dilation / Intersection
Erosion
、
Example:Erosion/Dilation
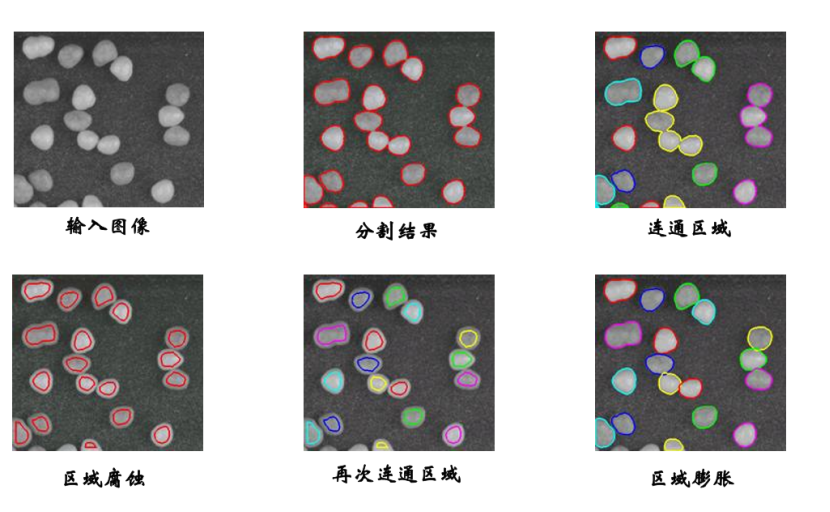
Closing
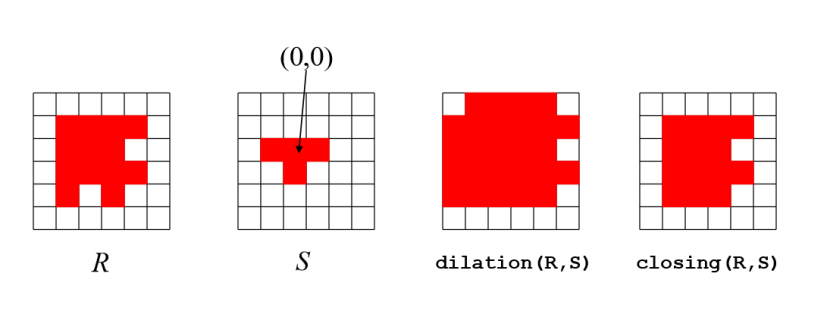
Example: Closing

















 495
495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









