






激光SLAM从理论到实践:
里程计运动模型及标定:
运动模型大致分为两种:一、两轮差分底盘的运动学模型,二、三轮全向底盘运动模型。
一,两轮差分底盘的运动学模型:
差分模型与运动解算(线速度和角速度的计算过程分析)
- 差分运动底盘它其实是一个欠驱动的模型,他的自由度是三个,x,y,角度C塔。但是他的驱动数和输入数是两个,一个是左轮的速度VL和右轮速度VR,它的运动是耦合的,它只能做圆弧运动。
- d为左轮或者右轮到车底盘中心的距离,假设左轮与右轮d相等,最左边的点为圆心,现在要让机器人围绕这个圆心做圆弧运动,r为圆心到机器人底盘中心的距离,也就是机器人做圆弧运动的半径。
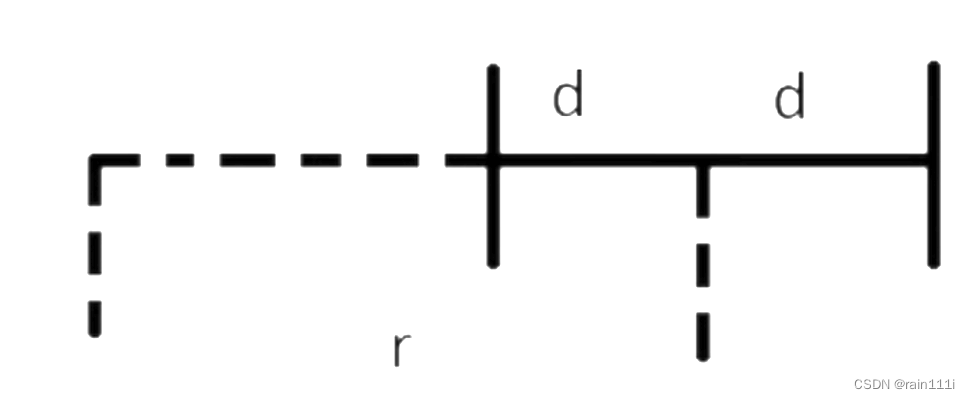
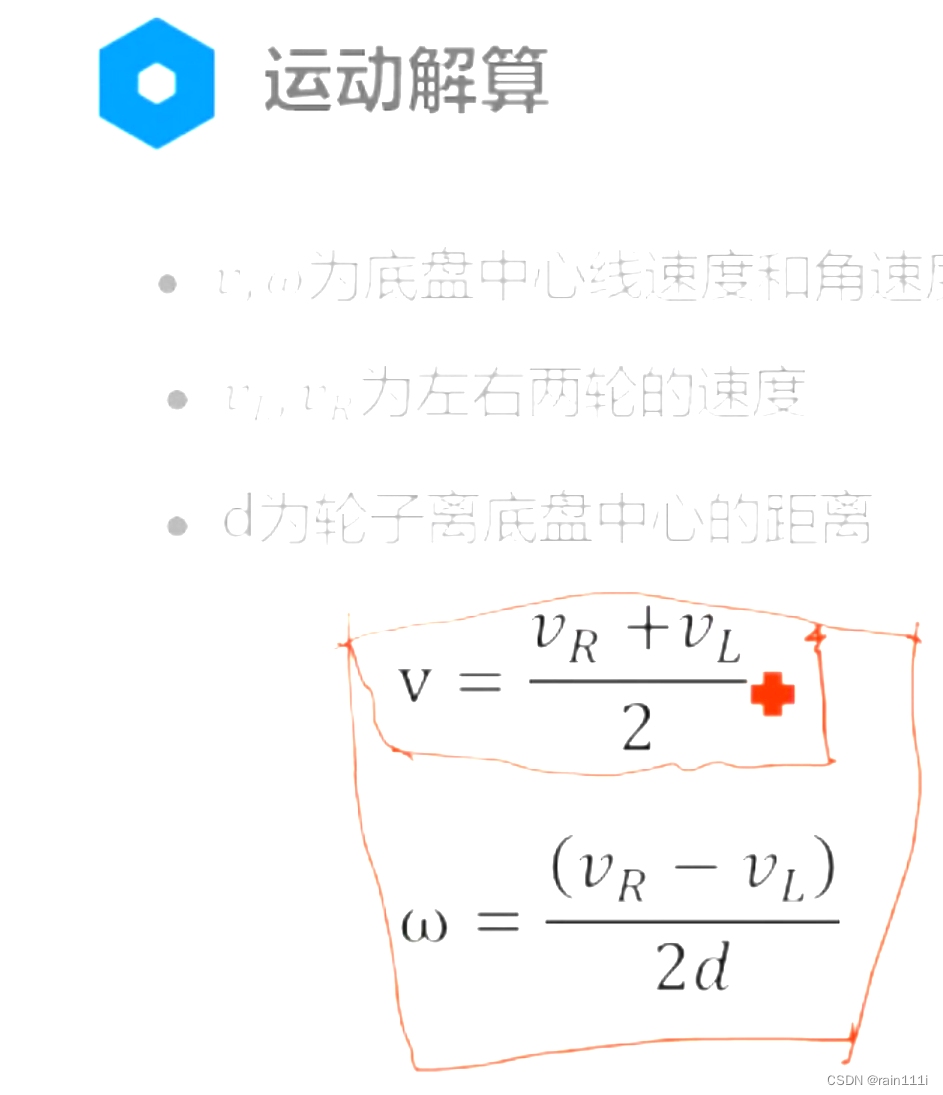
该运动符合下列公式:
二、三轮全向底盘运动模型:
整体公式如下:
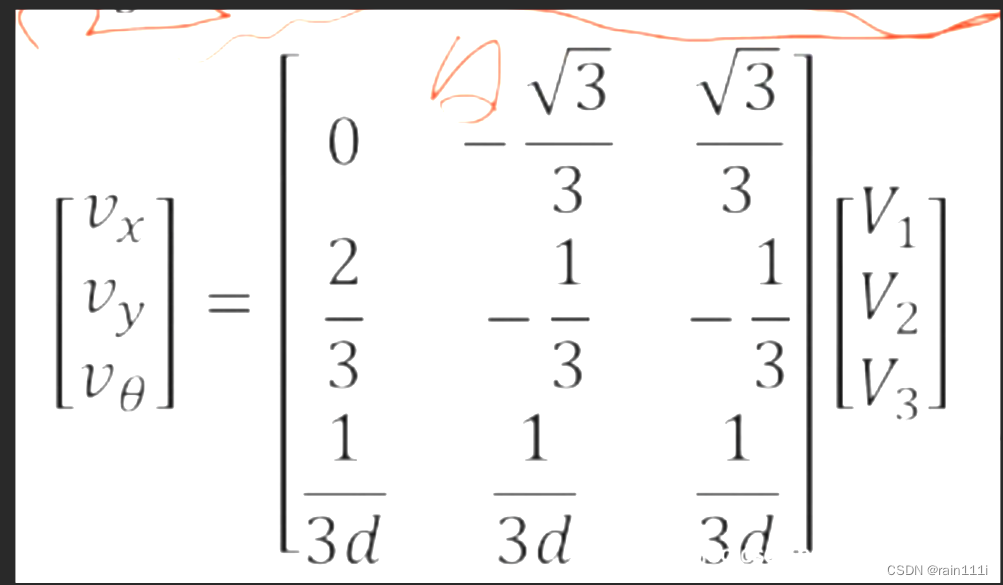
- 这样就可以通过编码器测得V1、V2、V3,计算得到Vx(x方向的线速度)、Vy(y方向的线速度)、Vc塔(角速度)。当然也可以通过转换前的公式,在ROS下发线速度和角速度时,STM32接收并计算转速随后控制机器人运动。
- 求出x、y方向得线速度和旋转的角速度有什么用?
- 因为这不仅仅是关于速度的,还有关与距离和角度,试想矩阵两边同时乘以△t,也就是积分就得到了dx、dy、dc塔,也就是位移和转过的角度了。这也就是里程计的模型了
- 总结一下里程计的模型:
- 不管是差分还是三轮全向,他们的运动学模型,就是根据他们自身的特性和编码器测量来的数据(差分是VL和VR,全向是V1、V2、V3)怎么去得到一个dx、dy、和dc塔的一个过程。
- 底盘的任务就是计算编码器的tick值,然后计算线速度,通过IMU计算角速度上发到给ROS
- ROS端控制时就直接发送的线速度和角速度信息给STM32,随后STM32再计算成转速然后再通过PID控制输出PWM驱动电机
---------------------------------------------------------------------------------------------------------------
里程计标定:
里程计标定是指在机器人或自动化系统中校准或校验里程计(odometry)的过程。里程计是一种用于测量移动机器人位置和方向变化的技术,通常通过传感器(如轮速编码器)来收集运动数据。然而,由于各种因素(如轮胎磨损、地面摩擦等)可能导致里程计的误差积累,因此需要定期进行标定以确保准确性。
里程计标定的主要目的包括:
1.确保机器人在移动时能够准确地知道自己的位置和方向。
2.优化路径规划和导航算法的性能,以确保机器人能够有效地到达目标位置。
3.提高机器人在环境中的定位精度,从而增强其执行任务的能力。
4.降低机器人系统中误差积累的影响,提高系统的稳定性和可靠性。
在进行里程计标定时,通常会使用一系列已知位置的参考点或地标,并通过比较机器人测量的位置与实际位置之间的差异来调整里程计参数。这个过程可以是自动化的,也可以是手动的,取决于系统的要求和可用的技术。















 5794
5794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









