







VIO概述
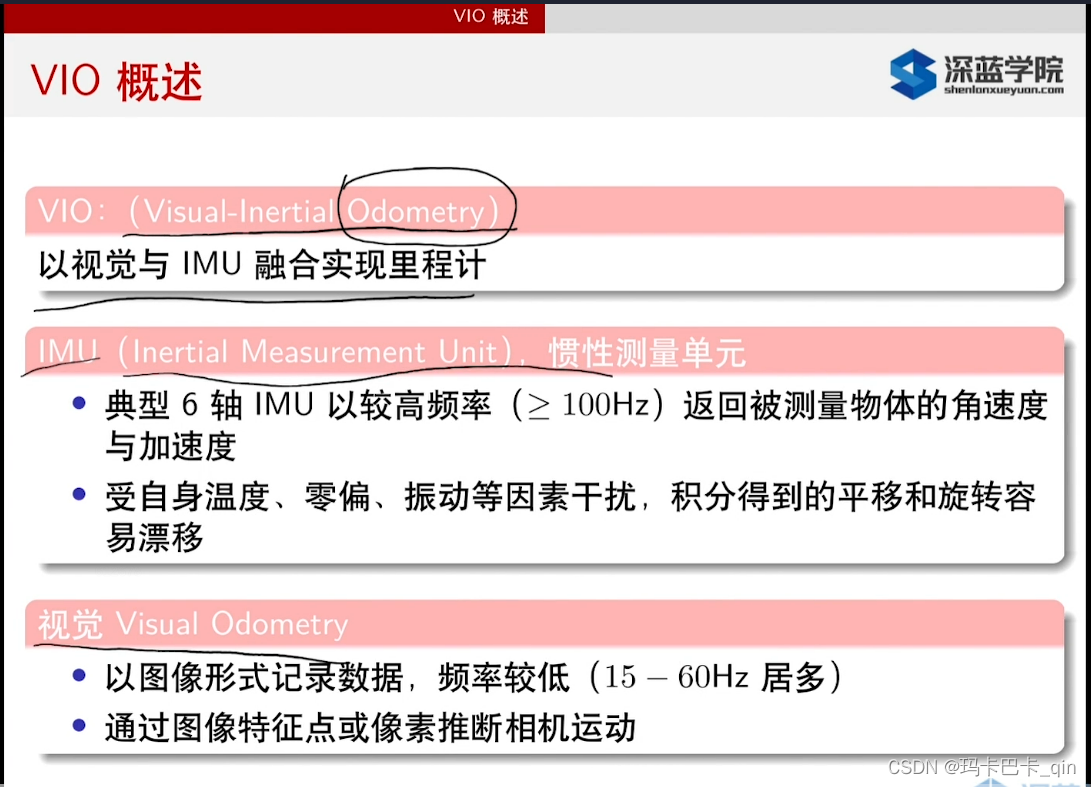
1. VIO整体概述

 松耦合:各部分自己算自己的,最后单独把数据来算
松耦合:各部分自己算自己的,最后单独把数据来算
紧耦合:同时考虑这两个问题(效果更好)
 IMU+GPS精度可以达到cm级,但是受环境影响比较大
IMU+GPS精度可以达到cm级,但是受环境影响比较大
融合方案
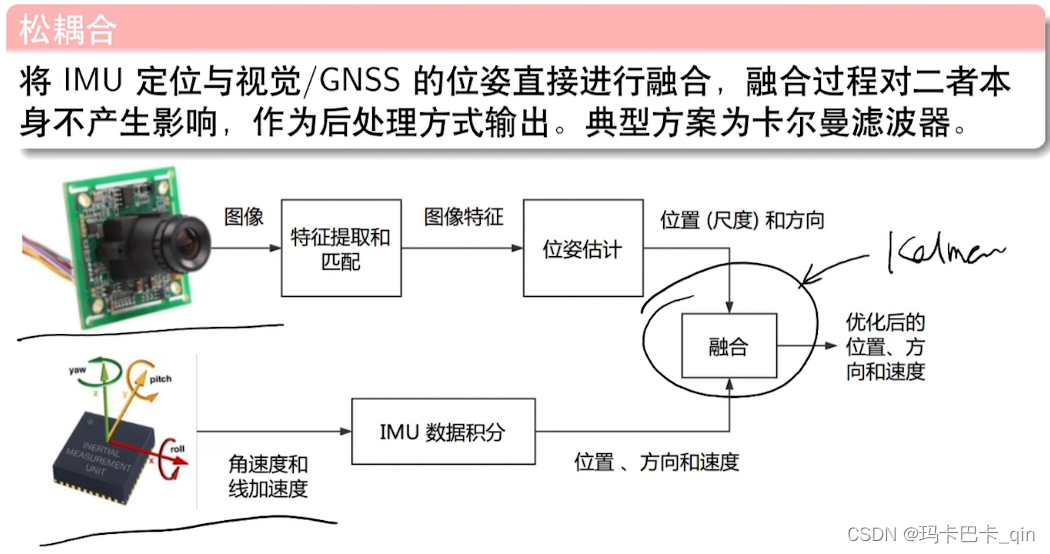 采用卡尔曼滤波,当一边数据来源不准确时,整体受影响
采用卡尔曼滤波,当一边数据来源不准确时,整体受影响


2. 预备数学知识
2.1 三维刚体运动


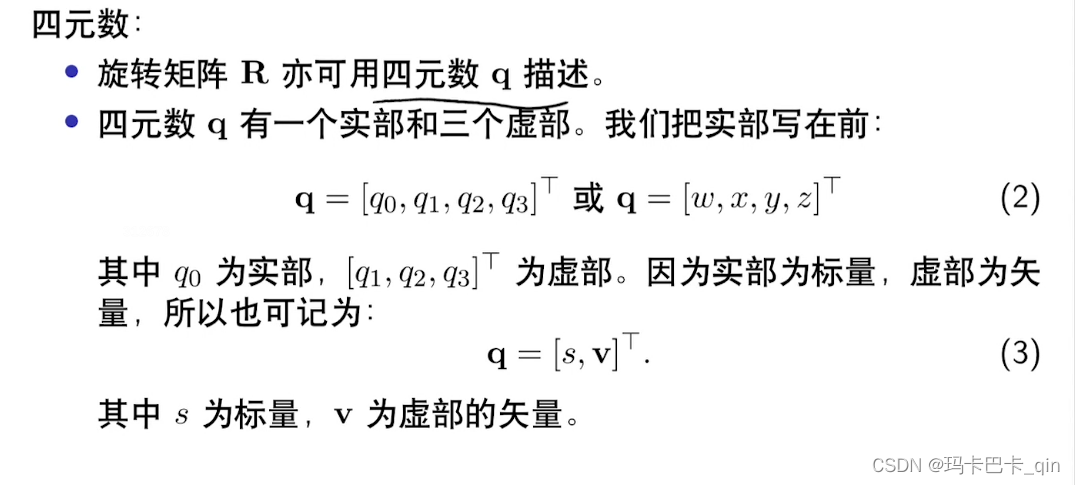
2.2 四元数
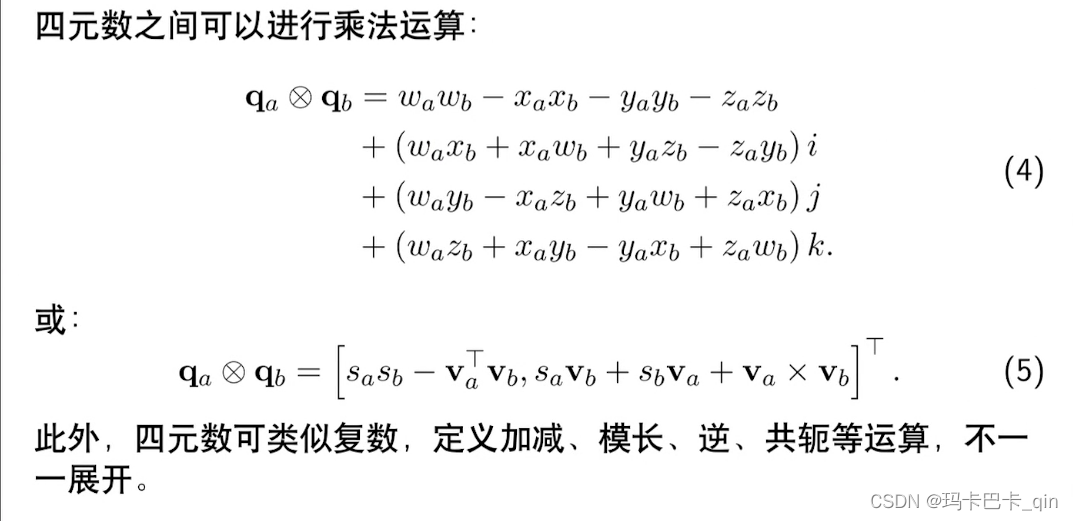
 对时间求导
对时间求导

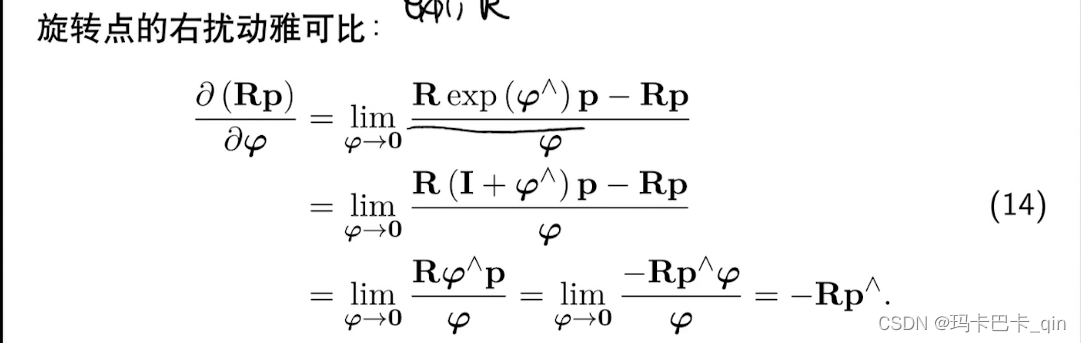
2.3 李代数





这个课程就没有怎么用
S
E
(
3
)
SE(3)
SE(3), 直接用
S
O
(
3
)
+
t
SO(3)+t
SO(3)+t
3. 作业

test.cpp
#include <iostream>
#include <ctime>
#include <Eigen/Core>
#include <Eigen/Dense>
#include <sophus/so3.h>
#include <sophus/se3.h>
using namespace std;
int main()
{
Eigen::Vector3d w(0.01,0.02,0.03);
Eigen::Matrix3d R_I = Eigen::Matrix3d::Identity();
Sophus::SO3 SO3_R_I(R_I);
Eigen::Quaterniond q_I = Eigen::Quaterniond(R_I);
// 输出更新之前的R和q
cout << endl << "before update, R is: " << endl << SO3_R_I.matrix() << endl;
cout << endl << "before update, q is: " << q_I.coeffs().transpose()<< endl;
//update
cout << "update ..." << endl;
Sophus::SO3 SO3_updated = SO3_R_I * Sophus::SO3::exp(w); //对R 进行右乘更新
cout << endl << "updated, R is: " << endl << SO3_updated.matrix() << endl;
Eigen::Quaterniond q_w(1.0,0.005,0.01,0.015);
q_w.normalize();
q_I = q_I * q_w;
cout << endl << "updated, q is: " << q_I.coeffs().transpose()<< endl;
cout << "updated, from q to R is: " <<endl << q_I.toRotationMatrix()<< endl;
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(test)
include_directories( "/usr/include/eigen3" )
# 为使用 sophus ,需要使用 find_package 命令找到它
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable( test test.cpp )
target_link_libraries( test ${Sophus_LIBRARIES} )
















 419
419











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











