






针对市场上存在的小车和相关ROS-SLAM课程,笔者发现他们存在以下两个问题:
-
提供实体小车的商家,一般只会提供基础的课程和小车使用说明,缺少配套实战性、操作性均优的ROS-SLAM课程。
-
提供课程的商家往往没有配套的智能小车。让学员从0到1搭建出一辆小车,对于新手来说,通常是比较困难的,容易浪费时间。
针对上述缺点,3D视觉工坊联合主讲老师大兀开发了一款性能强、通用性好、配套实战课程的NanoBot A001智能小车。
通过该小车和配套课程,学员能够快速、系统、全面地学习ROS1和2D激光SLAM,快速入门SLAM和提升自身专业技能。
NanoBot A001智能小车实物图

ROS-SLAM两轮差速小车NanoBot A001
| NanoBot A001智能小车 | |
|---|---|
| 主控制器 | jetsonNano 4G版本 |
| 微控制器 | 树莓派主控 |
| 激光雷达 | 思岚A1 |
| 相机 | 160度镜头(CSI接口) |
| 音频 | 支持麦克风和喇叭 |
| 电机 | 高性能直流电机+高精度编码器 |
| 无线网络 | 双模无线网卡(双频wifi+蓝牙) |
| 其他配置 | 电池电压检测、1寸OLED显示屏等 |
NanoBot A001智能小车亮点在哪
1.用料扎实,选择主流、高性能的芯片、硬件等
2.支持功能丰富(详见下表)
3.课程配套完善,首期有完善的ROS和2D激光SLAM课程
4.通用性强,jetson nano主控板可拆卸复用在其它产品上。
NanoBot A001智能小车支持的功能
| NanoBot A001支持的功能 | |
|---|---|
| 功能点 | 功能介绍 |
| SLAM 激光雷达构建地图 | 支持轮式里程计,IMU,激光雷达等多传感器融合建图 |
| 路径规划 自主导航 动态避障 | 支持单、多点导航,路径规划,动态避障等 |
| 视觉处理 AI检测 | 支持AI目标检测,目标分割,物体追踪,目标测距等 |
| 视觉SLAM应用开发 | 支持视觉slam建图 |
| 音频应用开发 | 同时支持“听”、“说” |
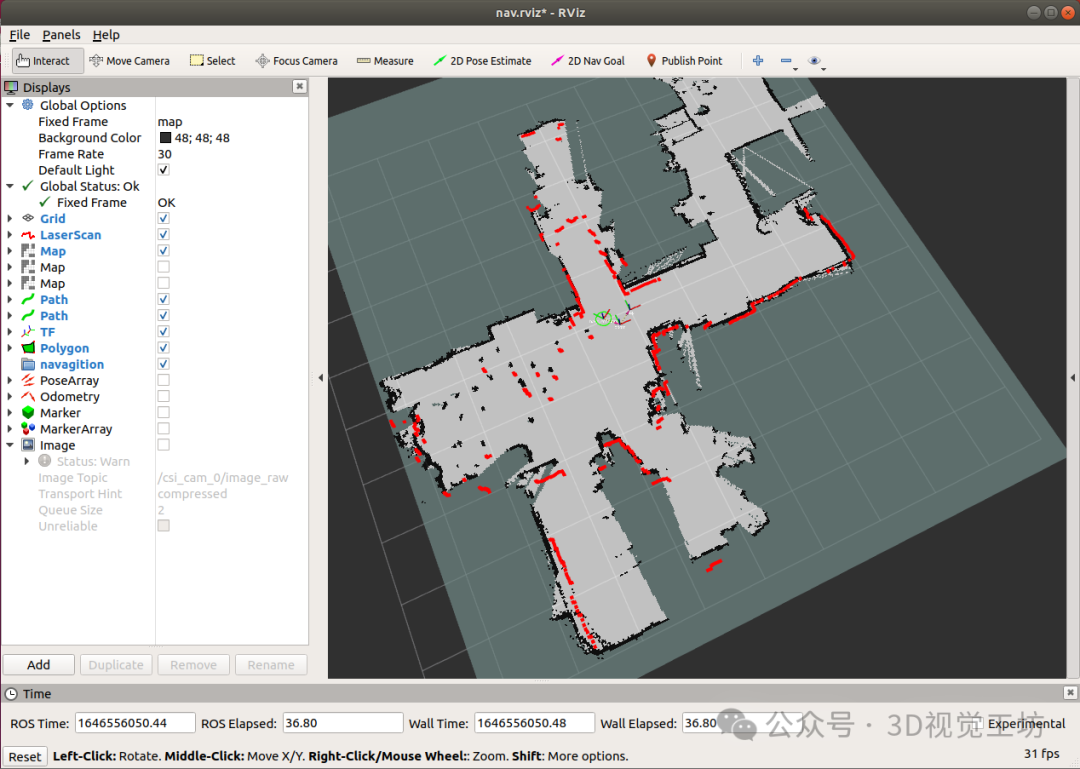
SLAM 激光雷达构建地图
支持轮式里程计,IMU,激光雷达等多传感器融合建图
如Gmapping, Hector, Karto, Cartographer等建图算法
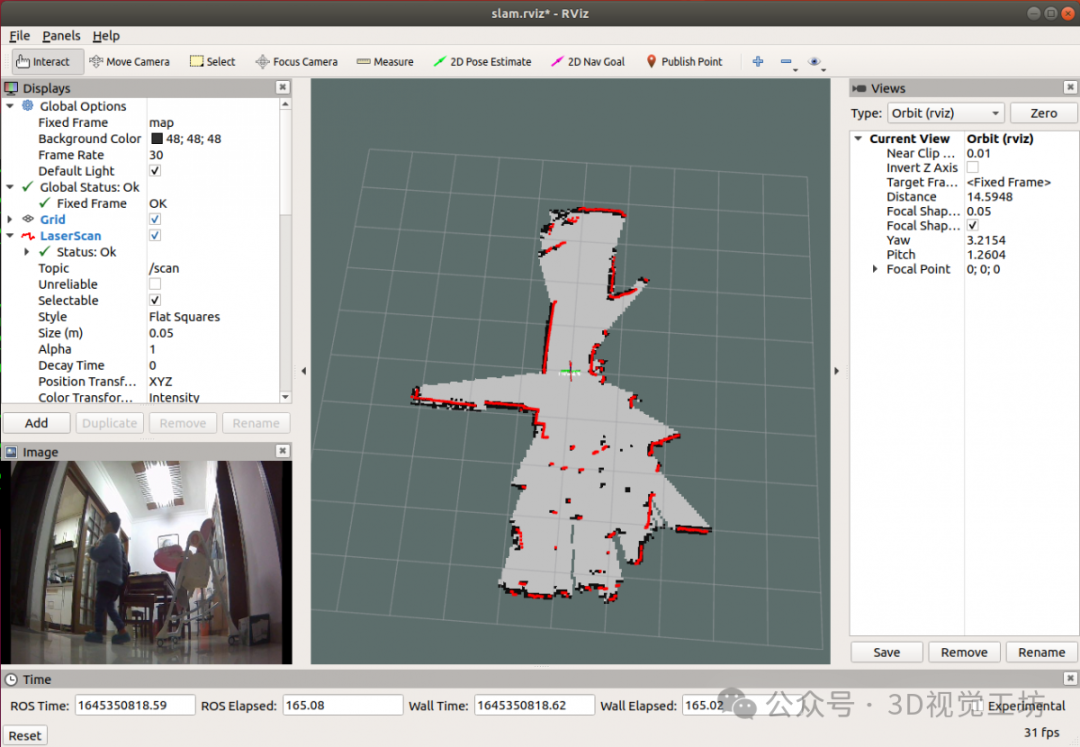
Gmapping算法建图效果
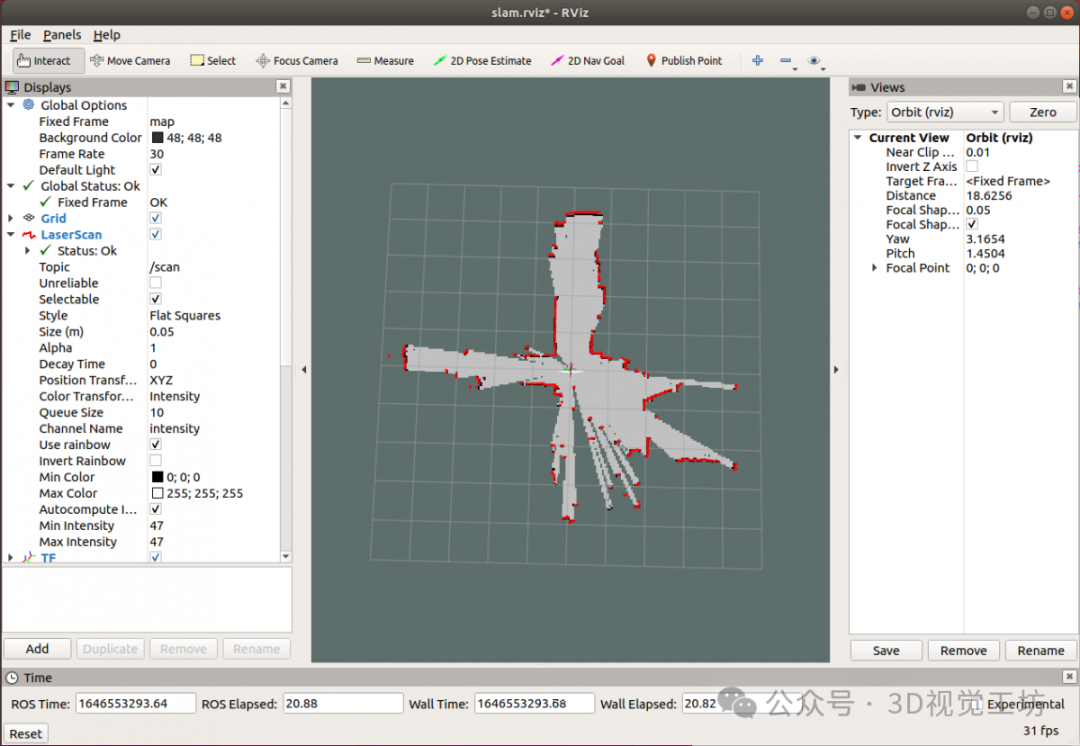
Hector算法建图效果
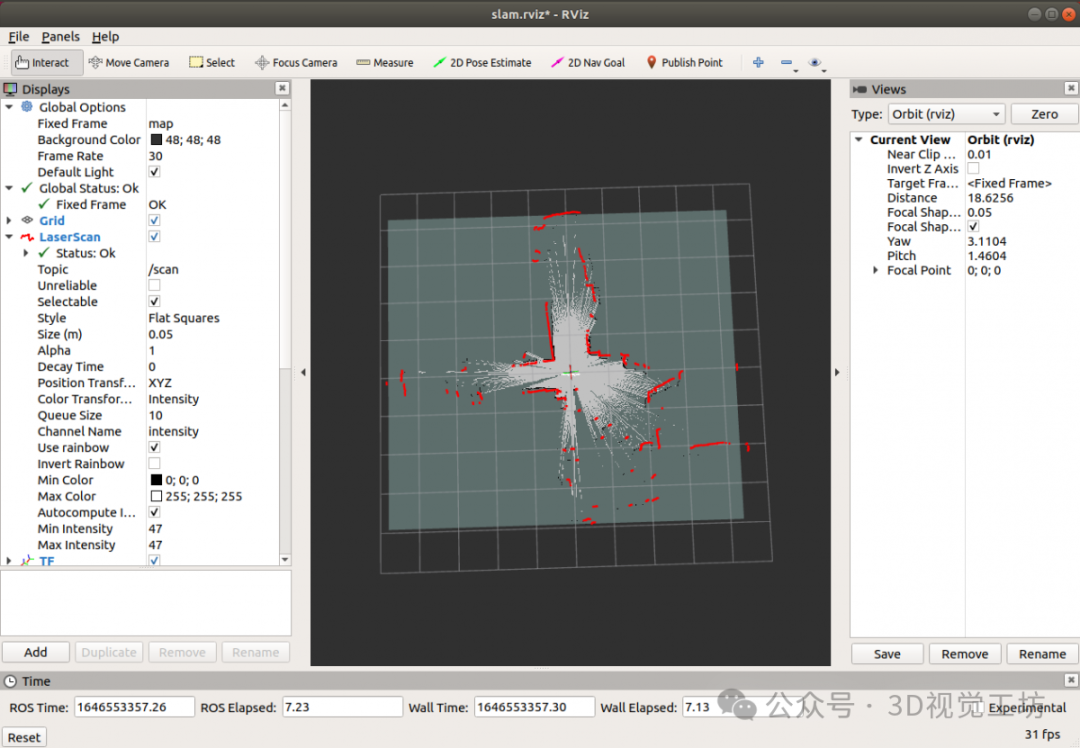
karto算法建图效果
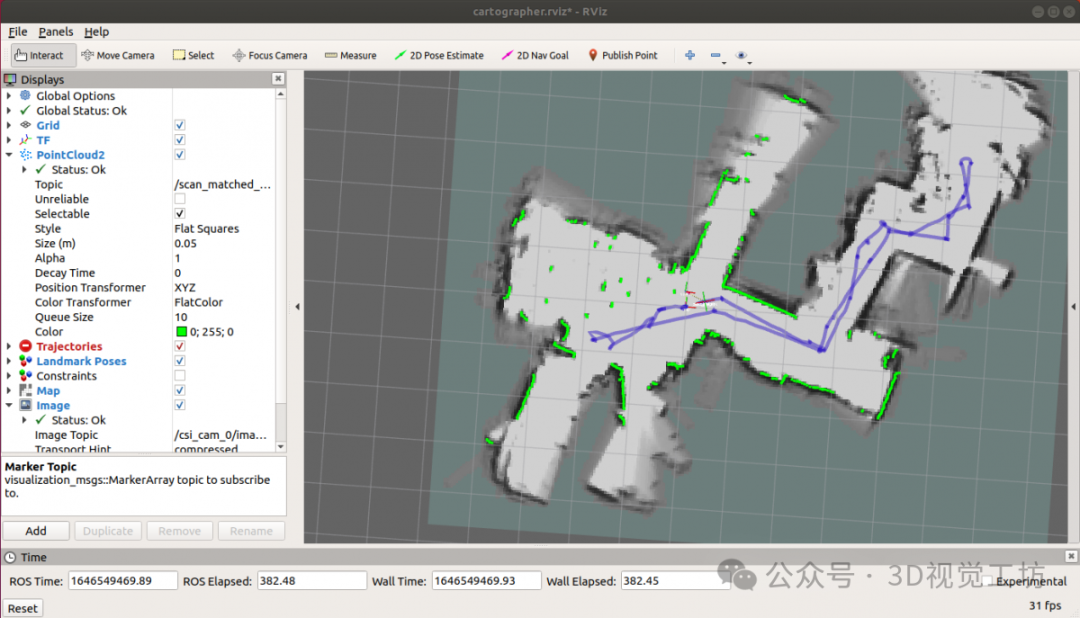
cartographer算法建图效果。图中绿色点为点云数据而非雷达数据,蓝色为小车运动路径
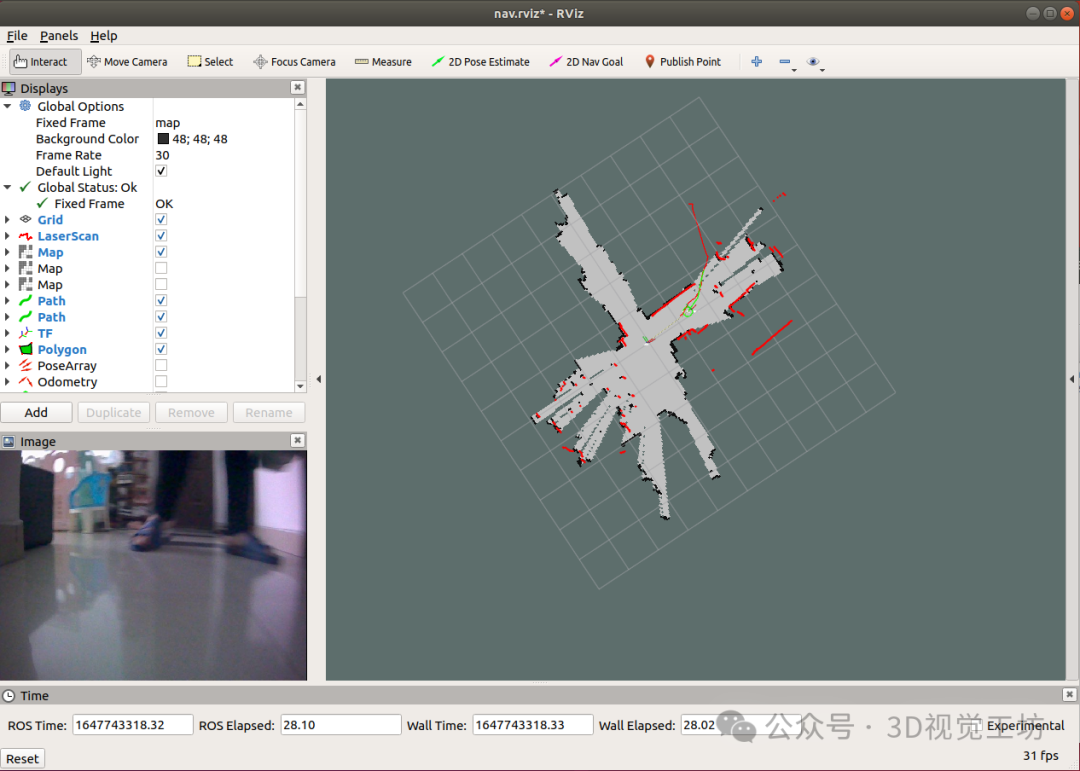
路径规划 自主导航 动态避障
AMCL自适应蒙特卡洛定位
支持单点导航,多点巡逻导航,边导航边建图

单点导航:发布导航目标位置,机器人将自动规划路径导航到目标位置
多点巡逻导航:添加导航点,机器人将在导航点之间巡航导航
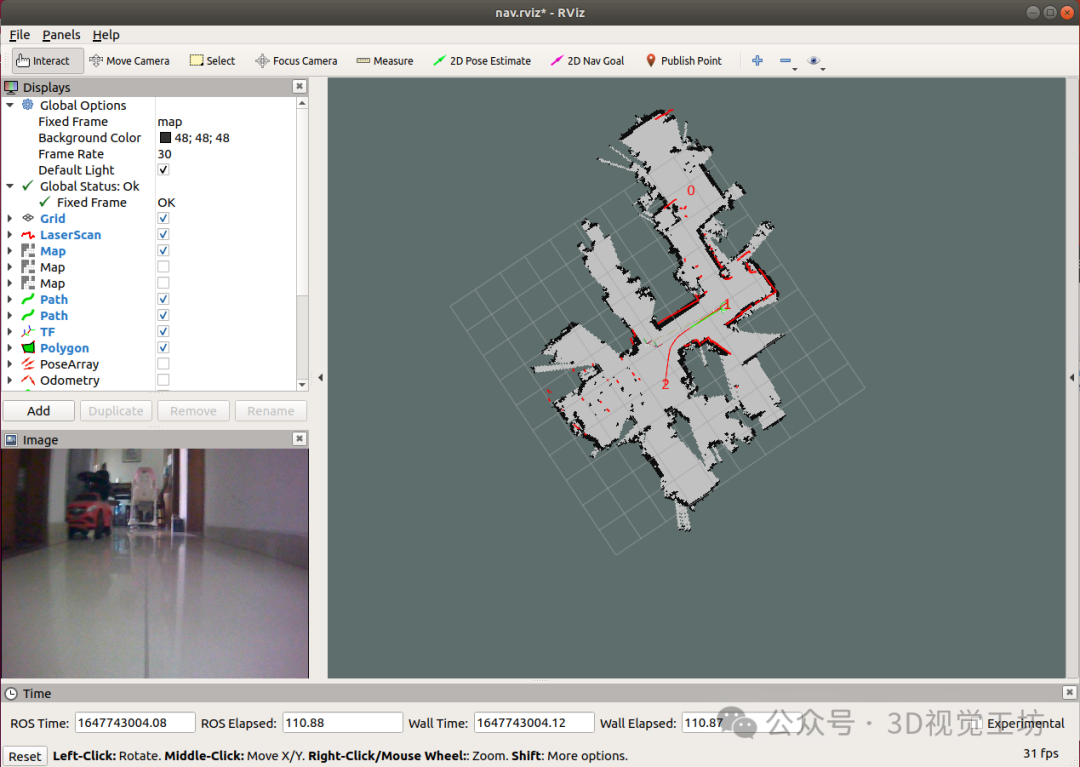
边导航边建图:可以发布导航目标位置,机器人将自动探索路径导航到目标点,而且边扫描地图边发布
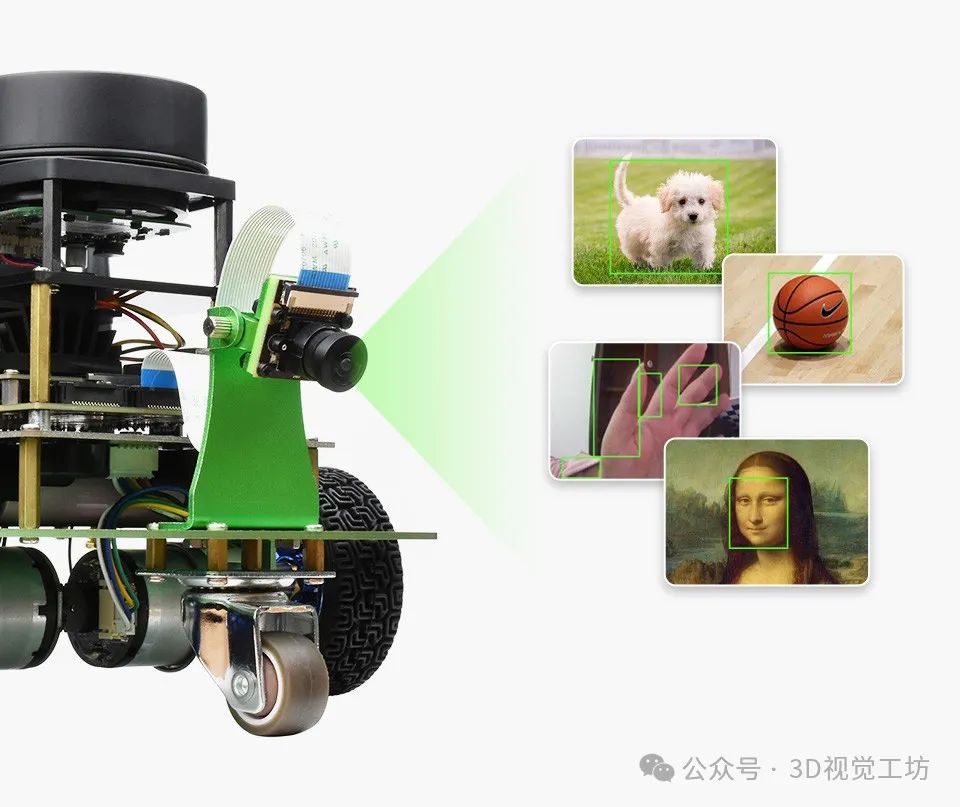
视觉处理AI检测
适合OpenCV视觉开发,AI目标检测,物体追踪,自动驾驶等AI功能
视觉SLAM应用开发
4G版jetson Nano支持开发视觉slam应用(3D视觉工坊官方示例开发中,尚未发布)。

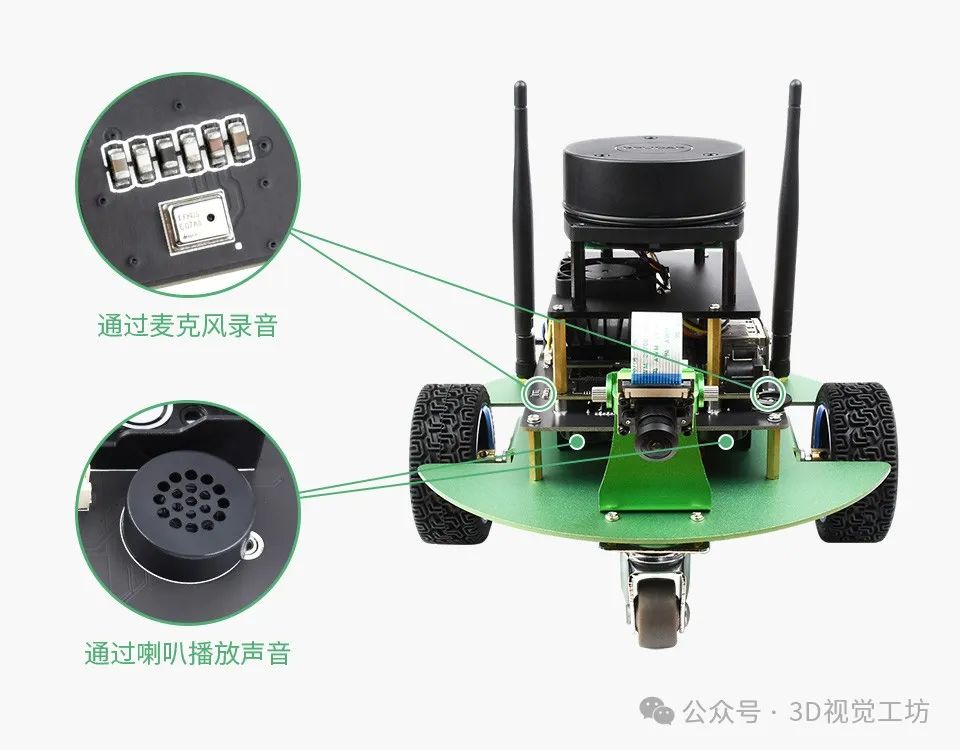
音频应用开发
板载两个高质量 MEMS 硅麦克和双喇叭,支持立体声录音和立体声播放, 从此机器人也有了耳朵和嘴巴,能"听"会"道",轻松实现智能语音交互
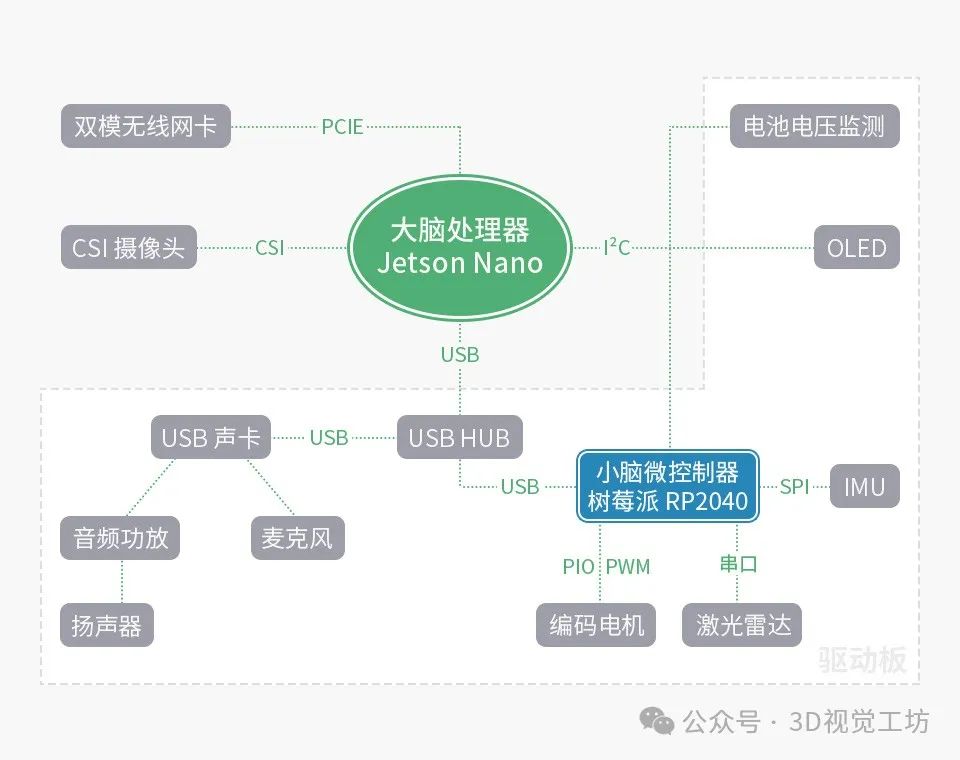
系统框图
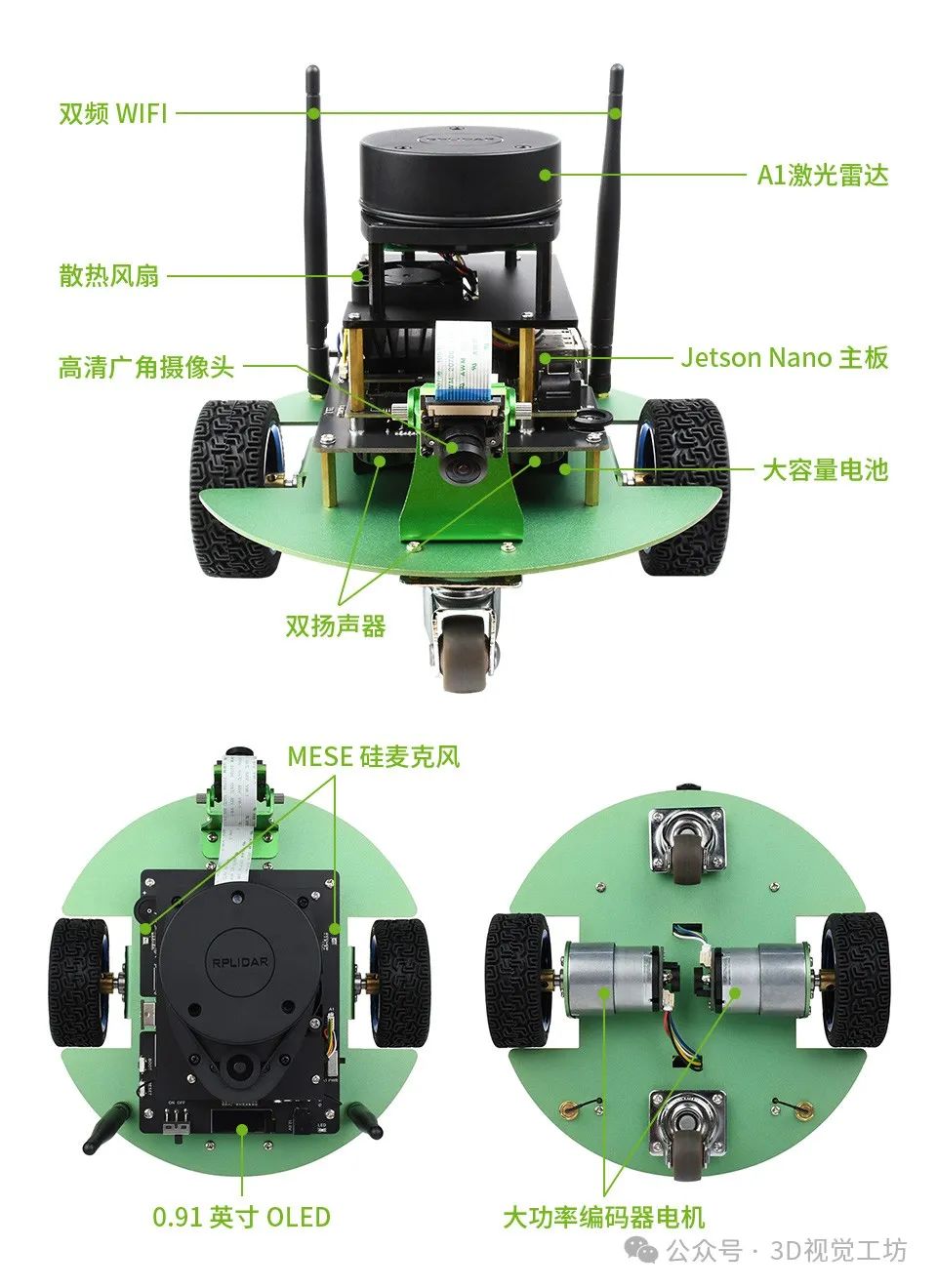
产品结构解析
产品尺寸

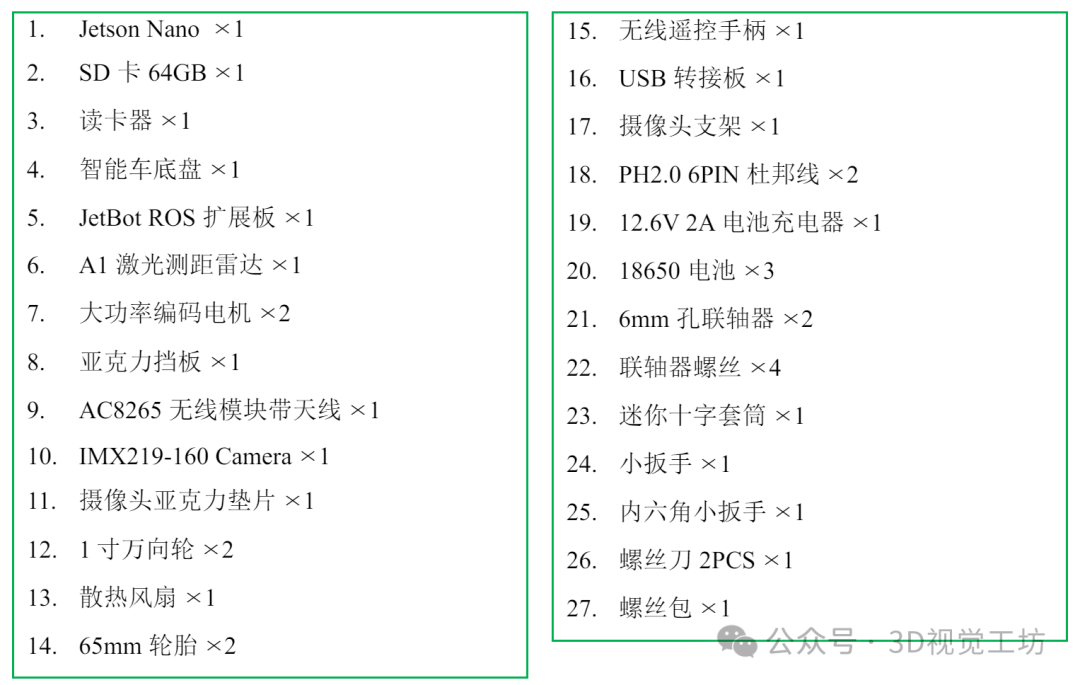
发货清单

配套课程
本硬件搭配视频课程为《零基础入门ROS-SLAM小车仿真与实践[理论+仿真+实战]视频课》,体验更佳。
学完课程,可以掌握哪些技能?
1.掌握ROS1基础的、核心的知识
2.看懂ROS1代码,会用C++编写ROS节点
3.掌握2D激光SLAM基础的、核心的知识
4.会用C++实现SLAM核心算法
5.会使用gazebo、rviz进行2d激光slam仿真
6.会使用C++编写一个2d激光slam简易仿真
7.对智能小车硬件和系统组成有直观认识和理解
8.在智能小车上修改和部署自己的算法和功能
购买硬件

扫码购买相关硬件
硬件咨询

扫码添加微信咨询相关硬件















 651
651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









