






一、实物连接

记得下载这个库,如果你是python3
pip3 install pymavlink
二、查找设备
最简单的方法,就是连接前后输入
ls /dev/
我这里是tty/ACM0,ttyACM 中的 ACM 是 “Abstract Control Model” 的缩写,表示这类设备通过 USB 提供虚拟串口接口。
记得赋予权限
chmod 777 /dev/ttyACM0
三,运行测试脚本
import time
from pymavlink import mavutil
master = mavutil.mavlink_connection("/dev/ttyACM0", baud=115200)
print("Waiting for heartbeat...")
master.wait_heartbeat()
print("Heartbeat received. Pixhawk is ready!")
while True:
msg = master.recv_match(type='ATTITUDE',timeout=1) # 设置超时时间为1秒
if msg:
print(msg)
else:
print("No message received.")
time.sleep(0.1)
新建脚本,其中设备号改成你自己的,我这里是ACM0
msg = master.recv_match(type='ATTITUDE',timeout=1)
我这里是指定特定的信息ATTITUDE,你可以直接
msg = master.recv_match(timeout=1)
来获取所有信息
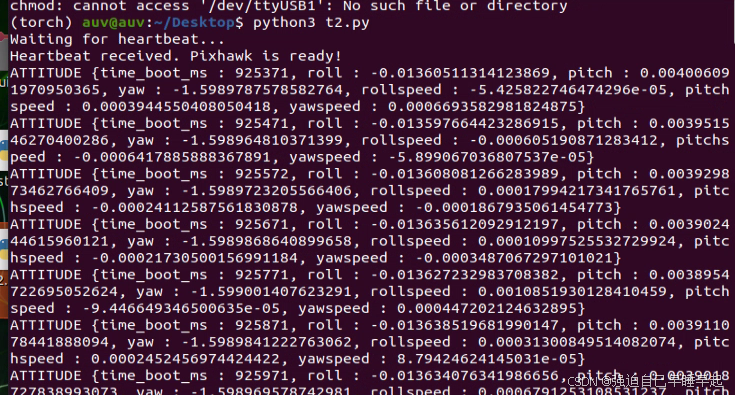
运行脚本,可以看到已经连接成功接收信息了


















 1637
1637

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









