






中断系统:在主程序出现特定的触发条件使得CPU暂停当前运算程序去处理其他程序,并对现有程序形成保护,当触发程序结束后回到主程序继续操作。
中断执行的流程
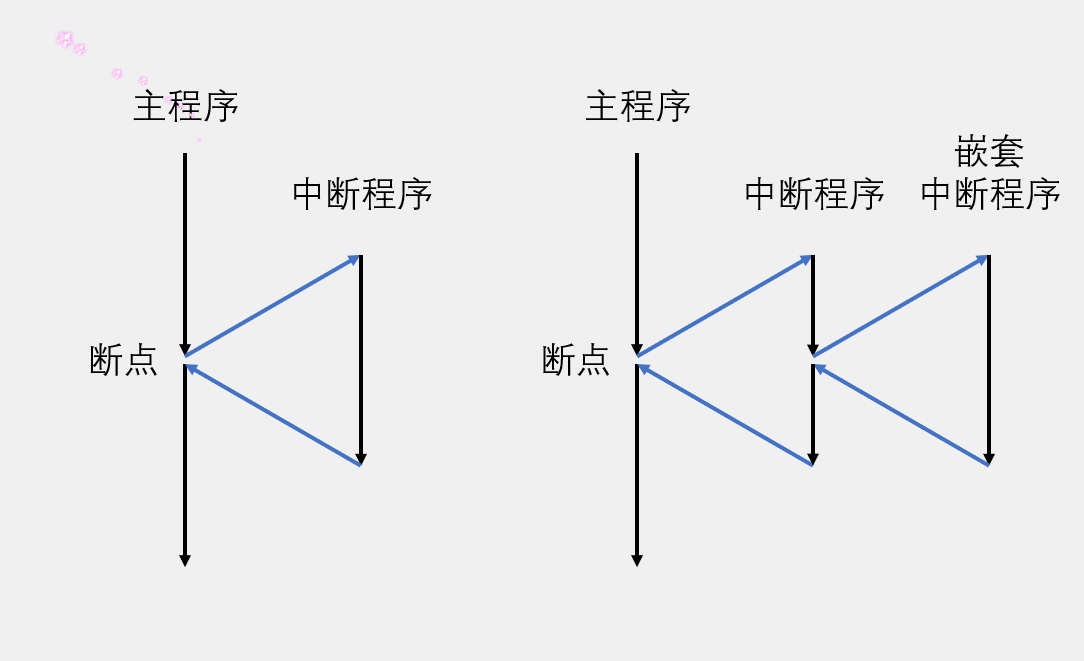
第一个图是响应优先级,第二个是抢占优先级(嵌套中断程序)
区别:当有病人正在看病,来了新的紧急的病人,越过了后面排队的人直接拍到正在看病的人后面是响应优先级,正在看的病人直接不看了,去看紧急的病人是抢占优先级。
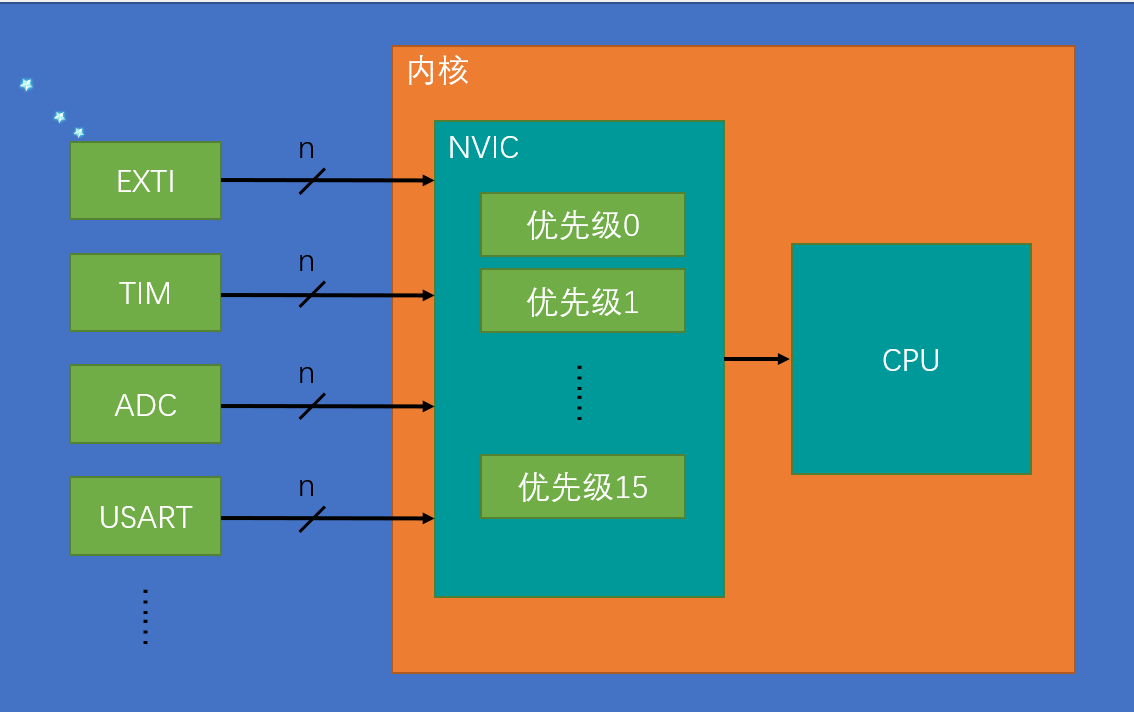
NVIC(CPU的小秘书)
统一管理中断;进行抢占优先级和响应优先级的分组;
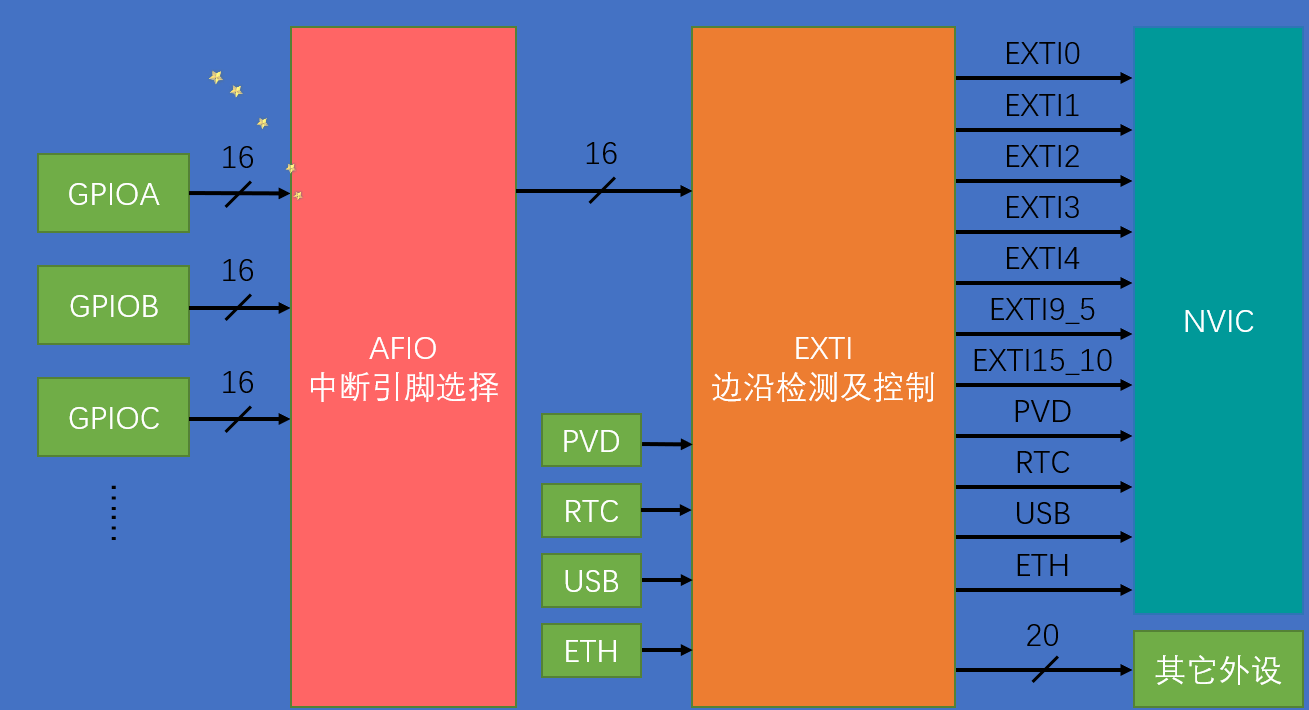
 EXTI外部中断
EXTI外部中断
主函数
#include "stm32f10x.h" // Device header
#include "Led.h"//LED专用头文件
#include "Delay.h"//延时函数专用头文件
#include "countsensor.h"
#include "oled.h"
int main(void)
{
Led_Init();//LED初始化函数
OLED_Init();//OLED初始化函数
Countsensor_Init();//传感器模块初始化
OLED_ShowString(1,1,"count:");
while(1)
{
OLED_ShowNum(1,7,Countsener_Get(),5);
}
}传感器底层函数
#include "stm32f10x.h" // Device header
uint16_t countsener_Count;//全局变量,计数
void Countsensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//开启AFIO的时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//将14号引脚映射到AFIO
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line=EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;//中断模式
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;//检测下降沿
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//进行分组
NVIC_InitTypeDef NVIC_InitStructure;//定义结构体
NVIC_InitStructure.NVIC_IRQChannel=EXTI15_10_IRQn;//选择IRQ的通道
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;//使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//配置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//配置响应优先级
NVIC_Init(&NVIC_InitStructure);
}
uint16_t Countsener_Get(void)
{
return countsener_Count;
}
void EXTI15_10_IRQHandler(void)//中断函数
{
if(EXTI_GetITStatus(EXTI_Line14)==SET)//判断标志位是否是1
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14)==0)
{
countsener_Count++;
}
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
# ifndef __COUNTSENSOR_H
# define __COUNTSENSOR_H
void Countsensor_Init(void);
uint16_t Countsener_Get(void);
#endif
















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









