






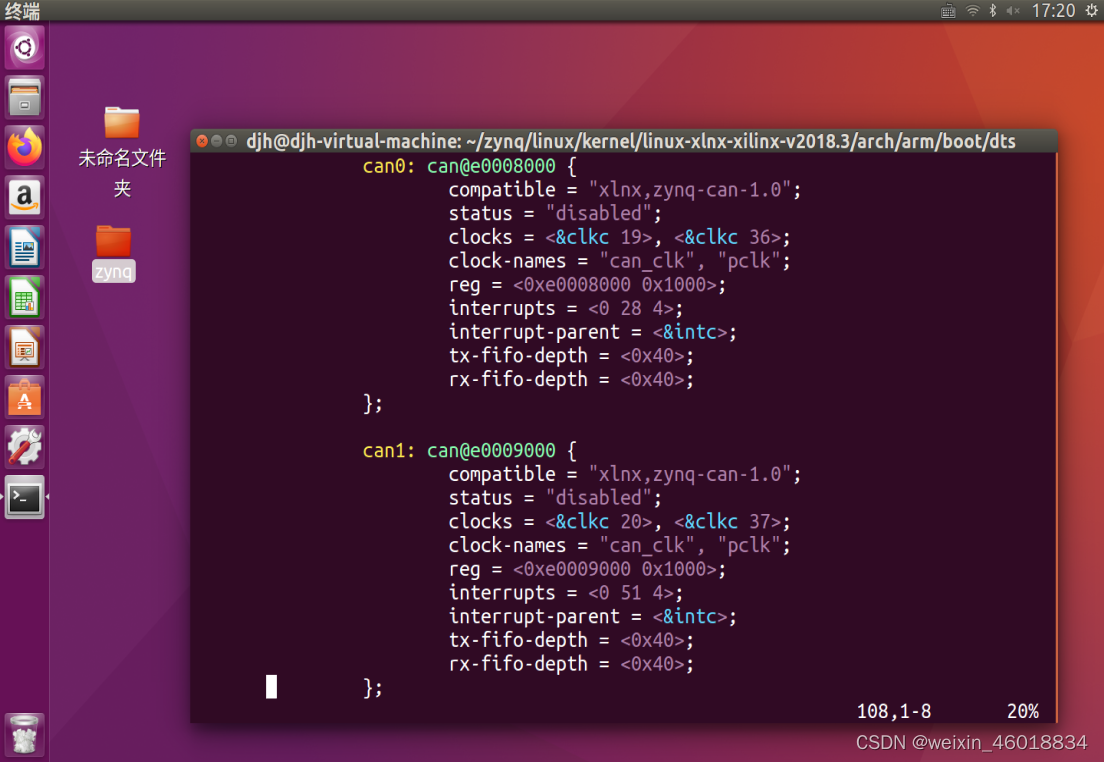
这是 xilinx 官方提供的 CAN 总线控制器节点配置信息,两个设备节点的 status 属性的值都是"disabled",也就是说默认情况下 CAN 外设是没有使能的,当我们在 vivado 软件中打开了相应的 CAN 控制器外设的时候,编译 hdf 文件得到pcw.dtsi 设备树文件中就会将 CAN 节点的 status 属性设置为"okay";我们打开arch/arm/boot/dts/pcw.dtsi 设备树文件,如下所示:
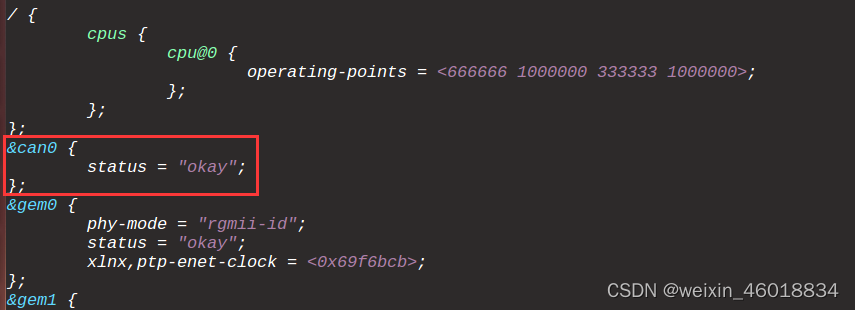
因为我们使用 vivado 工程只打开了 CAN0 控制器外设,所以 pcw.dtsi 设备树文件中就只
将 can0 节点的 status 设置为"okay",注意 pcw.dtsi 文件是自动生成的,我们不用对它进行
修改!
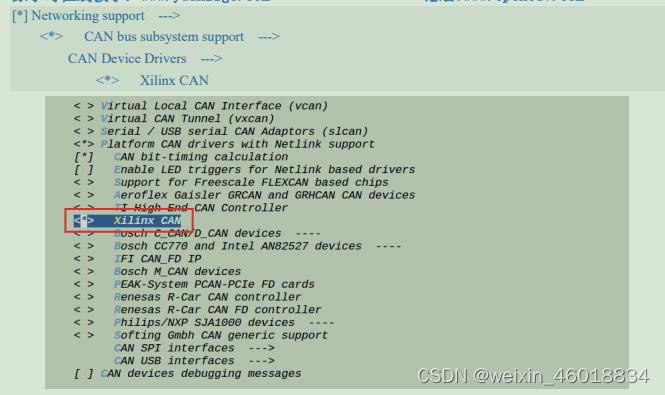
对于内核配置,我们使用的 Linux 内核源码默认已经使能了 ZYNQ CAN 驱动模块,所以这里不用再去配置了。
2.在CPU0的Linux系统配置完CAN后,此时在启动Linux系统后,输入ifconfig -a命令可以查看到CAN设备
ZYNQ双核运行控制外设(CAN、GPIO)时需要注意的点_为什么zynq can ip 无法进入config配置模式,xcan_selftest函数失效 (1)

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 714
714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









