






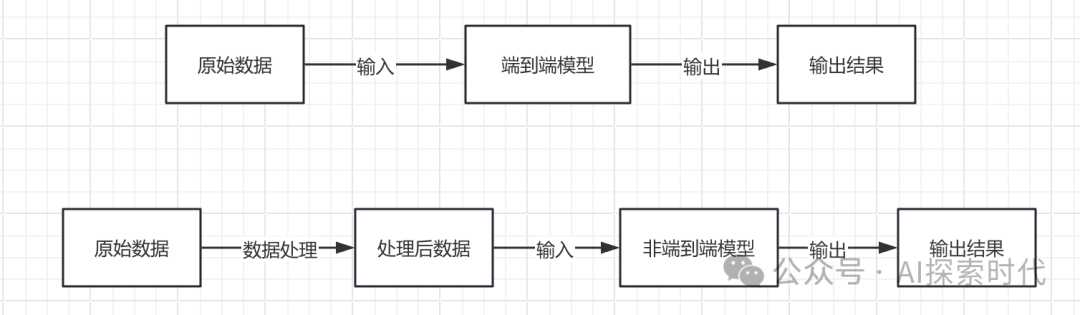
“ 端到端模型,是一个直接由输入获取输出的过程 ”
最近有一个很火的关于人工智能模型的词——端到端模型。
那么什么是端到端模型?为什么会提出端到端模型,以及它解决了哪些问题?
今天我们就来一起了解一下这个端到端模型。
端到端模型
还记得计算机组成原理里面,关于冯诺伊曼计算机结构中,组成计算机的几个模块吗?
运算器 控制器 存储器 输入设备和输出设备,由这五大模块组成了现有的计算机系统。
而对我们使用者来说,这五大模块中我们接触最多的就是输入设备与输出设备,也就是鼠标键盘显示器。
而运算器,控制器和存储器是由计算机系统自己处理的,我们不需要知道它们的内部运行原理,也不需要知道它们是怎么协调的。
同样端到端也是如此,从表象来看我们只需要关心其输入与输出,不需要知道它的内部结构,也就是说,端到端模型的表象是一个黑盒。
我们知道,大模型的表现是无法解释的,它更多的是一种现象,叫做智能涌现,现在很多研究机构都在解决大模型的可解释性,也就是大模型为什么能做到这样的效果,中间经历了哪些处理。
但如果要实现一个端到端的大模型,应该怎么实现呢?任何新技术的出现都是为了解决存在的问题,那端到端模型解决了什么问题?
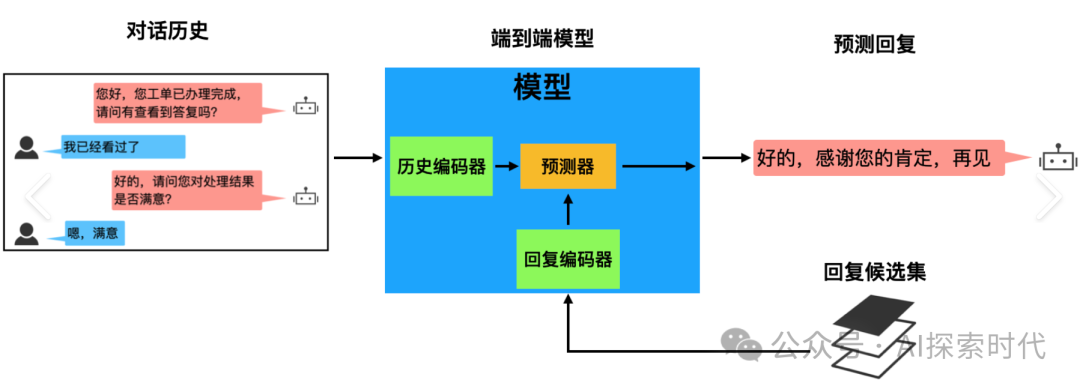
其实用一句话概括端到端,就是让大模型直接理解问题,然后给出答案或决策。
比如拿语音模型举例,很多人以为的语音模型就是直接理解语音,但事实上语音模型并不是直接理解语音;而是由多个模块组成的一个语音模型。
语音在语音模型中的处理过程,需要经过语音转文字,然后把文字输入给大模型,大模型处理完毕返回文字,再有转化系统把文字转换为语音返回给用户。
这就是现在大模型所存在的问题,中间需要经过多个模块的协同处理才能得到想要的结果。可能有人会问为什么不让大模型直接理解语音,还要经过中间的转化?
原因就是这样的实现方式技术难度低,容易实现。
而端到端模型的目的就是省略中间语音转文字,文字转语音的过程;为什么要这么做?
这么做的目的并不是为了炫耀技术,而是有些场景需要强大的实时性,无法接受如此长链条的处理响应时间。
比如说自动驾驶,现今的自动驾驶采用的就是多模块协作的方式,如路况采集,自动化分析,做出决策,执行决策等。这样的自动驾驶系统就需要大量的时间做出响应。
而如果采用端到端系统,那么端到端系统就可以直接采集路况数据,然后做出决策,省略中间各种乱七八糟的处理流程,大大提升了系统灵敏度。
从技术到角度来说,端到端模型实现难度更大,系统更复杂,而且可解释性更差,而且更像一个黑盒。
可能说到这里,有些人任务端到端模型能做到的事,普通大模型也可以做到,而且技术难度更低,成本也更低。
但端到端模型出现的原因并不是为了解决普通的问题,比如回答系统;哪怕你普通大模型性能低一点,回答慢一点也可以接受。
但在一些领域,如智能驾驶,高端制造,军事竞争等方面,延迟要在毫秒,甚至是微秒的程度;这时普通大模型就无法完成任务了。
端到端模型的主要目的就是为了让大模型直接接受输入,减少中间环节的处理成本,提升效率。
程序员应该比较容易理解端到端,普通大模型就类似于现在的高级语音,如java,python等;它们的功能强大,但执行效率低,原因就是中间有一个解释器。
而端到端模型就类似于C语言,直接转换为计算机能够处理的格式,省略了中间解释的环节。
虽然高级编程语言的作用越发强大,但永远也没有那个语言能完全取代C语言和汇编语言。
当然,C语言和汇编语言虽然效率高,但迁移性比较低,不同的平台需要不同的指令集和开发库。端到端模型也是如此,对训练数据质量的要求更高,适应性也更差。
因此,网上也有人说,所谓的端到端就是直接由输入得到输出,大模型可以直接理解输入数据,而不需要这样那样的转化过程。
如何学习AI大模型?
作为一名热心肠的互联网老兵,我决定把宝贵的AI知识分享给大家。 至于能学习到多少就看你的学习毅力和能力了 。我已将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】

一、全套AGI大模型学习路线
AI大模型时代的学习之旅:从基础到前沿,掌握人工智能的核心技能!

二、640套AI大模型报告合集
这套包含640份报告的合集,涵盖了AI大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。

三、AI大模型经典PDF籍
随着人工智能技术的飞速发展,AI大模型已经成为了当今科技领域的一大热点。这些大型预训练模型,如GPT-3、BERT、XLNet等,以其强大的语言理解和生成能力,正在改变我们对人工智能的认识。 那以下这些PDF籍就是非常不错的学习资源。
四、AI大模型商业化落地方案

作为普通人,入局大模型时代需要持续学习和实践,不断提高自己的技能和认知水平,同时也需要有责任感和伦理意识,为人工智能的健康发展贡献力量。

















 594
594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









