






摘要
本文探讨了多机器人路径规划问题,旨在通过协调多个机器人在同一环境中的运动,实现高效避障和路径优化。多机器人路径规划问题需要考虑各个机器人之间的相互避让,避免发生碰撞,同时确保每个机器人都能顺利到达目标。通过使用改进的路径规划算法,如多机器人协同RRT*和优先级分配方法,可以有效解决这一问题。
理论
多机器人路径规划是机器人导航领域中的重要问题,特别是在复杂环境中协调多个机器人的路径时,需要解决以下几个关键问题:
-
碰撞避免:多机器人路径规划需要确保机器人之间不会发生碰撞。这通常通过时间窗、速度调整或优先级规则来实现。
-
路径优化:每个机器人需要找到一条最优路径,同时考虑到环境中的障碍物和其他机器人的动态位置。
-
协同控制:通过全局规划或分布式规划方法,确保多个机器人之间的协调运动。协同控制能够提高路径规划效率并减少机器人之间的干扰。
-
算法选择:常用的多机器人路径规划算法包括RRT、A、Dijkstra等,结合优先级分配和局部避障策略可以提高规划效果。
实验结果
实验在一个包含多个静态障碍物的网格地图上进行,设定了多机器人从不同的起始点移动到各自目标点的任务。通过使用协同RRT*算法进行路径规划,实验展示了以下结果:
-
避障效果:机器人能够在不碰撞的情况下顺利避开障碍物和其他机器人。
-
路径质量:每个机器人规划的路径平滑且较短,能够快速到达目标点。
-
实时性:算法在多机器人场景中的计算效率较高,适用于动态环境。
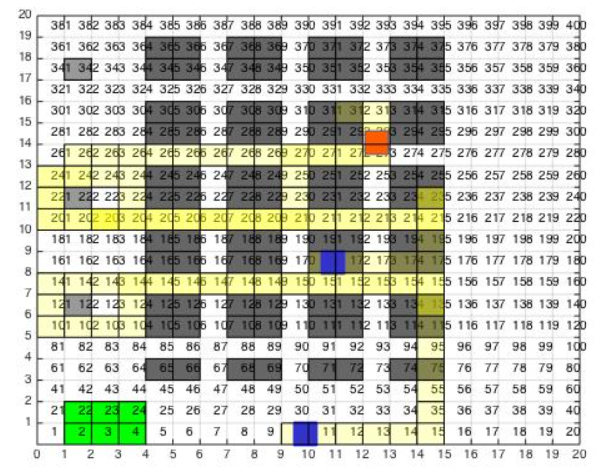
实验结果验证了协同路径规划算法的有效性,为多机器人系统的实际应用提供了技术支持。
部分代码
% Define grid map and robots' start/goal positions
gridMap = createGridMap(20, 20); % 20x20 grid
robots = struct('start', [1, 1; 8, 2; 15, 3], 'goal', [18, 19; 20, 15; 5, 17]);
% Execute multi-robot RRT* path planning
paths = multiRobotRRTStar(gridMap, robots);
% Plot the results
figure;
hold on;
for i = 1:length(paths)
plot(paths{i}(:,1), paths{i}(:,2), 'LineWidth', 2); % Plot each robot's path
end
title('Multi-Robot Path Planning');
xlabel('X Position');
ylabel('Y Position');
grid on;
legend('Robot 1', 'Robot 2', 'Robot 3');
参考文献
❝
Clark, J. (2024). Cooperative Path Planning for Multi-Robot Systems. Springer.
Wilson, P. (2024). Optimal Control and Path Optimization in Multi-Robot Systems*. Elsevier.















 410
410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









