






PID控制器是一种广泛应用于工业自动化和控制系统中的反馈控制机制。它通过比例(P)、积分(I)和微分(D)三部分来调节系统的输出,旨在将系统的输出(实际值)维持在期望值(设定点)附近。以下是 PID 控制器的详细介绍:
1. 控制器结构
PID控制器的输出是由三部分组成的,分别为:
-
比例控制(P):
- 作用:通过将当前误差值(期望值与实际值之间的差异)乘以一个比例常数(Kp),来调整控制输出。比例控制对误差的响应较快。
- 公式:P(t)=Kp⋅e(t)
- 其中 e(t)是当前时刻的误差,Kp是比例增益。
- 优点:提高系统的响应速度。
- 缺点:不能完全消除稳态误差。
-
积分控制(I):
- 作用:通过将误差值在一段时间内积累(积分),然后乘以一个积分常数(Ki),来消除系统的稳态误差。积分控制对长期误差进行调整。
- 公式:I(t)=Ki⋅∫e(τ) dτ
- 其中 ∫e(τ)dτ 是误差的积分,Ki 是积分增益。
- 优点:消除稳态误差。
- 缺点:可能导致系统超调和振荡。
-
微分控制(D):
- 作用:通过对误差值的变化率(即误差的导数)进行控制,乘以一个微分常数(Kd),来预测未来误差,从而减少系统的过冲和提高系统的稳定性。
- 公式:D(t)=Kd⋅de(t)/dt
- 其中de(t)/dt是误差的导数,Kd是微分增益。
- 优点:减少超调,提高系统的稳定性。
- 缺点:对噪声敏感。
2. PID 控制器的综合输出
PID 控制器的输出是比例、积分和微分部分的总和:
u(t)=Kp⋅e(t)+Ki⋅∫e(τ) dτ+Kd⋅de(t)/dt
其中,u(t) 是控制信号,调整系统的输入以使系统输出达到目标值。
3. 调节 PID 参数
PID 控制器的性能依赖于三个参数:Kp(比例增益)、Ki(积分增益)和 Kd(微分增益)。这些参数需要根据具体的应用进行调节:
- 比例增益 Kp:增大比例增益可以提高系统的响应速度,但过高的比例增益可能导致系统不稳定或引起过冲。
- 积分增益 Ki:适当的积分增益能够消除稳态误差,但过高的积分增益可能导致系统振荡。
- 微分增益 Kd:增大微分增益可以减少超调并改善系统的稳定性,但过高的微分增益可能引起系统对噪声的敏感。
调节 PID 参数通常使用以下几种方法:
- 手动调节法:逐步调整 Kp、Ki 和 Kd 以达到最佳性能。
- Ziegler-Nichols 方法:通过设置积分和微分增益为零,逐步增大比例增益,直到系统开始振荡,从而确定临界增益和振荡周期,然后计算 PID 参数。
- 自动调节方法:使用算法自动调整 PID 参数,以优化系统性能。
4. 应用实例
PID 控制器广泛应用于各种工程领域,包括但不限于:
- 温度控制:例如在炉子或冷却系统中,PID 控制器可以调节加热元件的功率以保持所需温度。
- 速度控制:在电动机速度控制中,PID 控制器调整电流以维持电动机在目标速度。
- 位置控制:在伺服系统中,PID 控制器控制执行器的位置,以确保其准确达到目标位置。
- 过程控制:在化学反应或生产线中,PID 控制器调节流量、压力或其他过程变量,以保持系统的稳定。
PID 控制器由于其结构简单、实现容易且适应性强,成为各种自动控制系统中的标准选择。
% PID 控制器参数
Kp = 44.0; % 比例系数
Ki = 0.5; % 积分系数
Kd = 0.1; % 微分系数
% 离散PID 变量
prev_error = 0;
integral = 0;
% 模拟参数
dt = 1; % 时间步长(秒)
t_final = 3600; % 模拟总时间(秒),例如1小时
t = 0:dt:t_final-dt; % 时间向量
% 假设的室内温度(初始值)
room_temp = 26; % 摄氏度
% 设定温度(用户希望达到的温度)
set_temp = 60; % 摄氏度
% PID 控制器的输出(假设为加热/制冷功率)
pid_output = zeros(size(t));
% 误差(设定温度与实际温度之差)
error = zeros(size(t));
% 假设的空调系统的响应(一阶系统)
tau = 120; % 时间常数(秒),代表系统响应速度
% 模拟循环
for k = 2:length(t)
% 计算误差
error(k) = set_temp - room_temp(k-1);
% PID 计算
p = Kp * error(k);
i = Ki * integral;
if k > 1
de = (error(k) - prev_error) / dt; % 微分项
d = Kd * de;
else
d = 0; % 初始时刻没有微分项
end
% 控制器输出(加热/制冷功率)
pid_output(k) = p + i + d;
% 更新积分项
integral = integral + error(k) * dt;
% 限制PID输出(可选,防止过度加热/制冷)
pid_output(k) = max(min(pid_output(k), 100), -100); % 假设最大/最小功率为±100(单位可以是%)
% 模拟空调系统的响应(一阶系统)
room_temp_change = pid_output(k) * dt / tau; % 温度变化量
room_temp(k) = room_temp(k-1) + room_temp_change; % 更新室内温度
% 更新误差以供下一次迭代使用
prev_error = error(k);
end
% 绘制结果
figure;
subplot(2,1,1);
plot(t, set_temp * ones(size(t)), 'r--', t, room_temp, 'b');
title('PID Control of Air Conditioning System - Temperature');
xlabel('Time (s)');
ylabel('Temperature (°C)');
legend('Set Temperature', 'Room Temperature');
grid on;
subplot(2,1,2);
plot(t, pid_output);
title('Control Signal (Heating/Cooling Power) Over Time');
xlabel('Time (s)');
ylabel('Control Signal (units)');
grid on;
% 输出最终温度误差
final_error = error(end);
fprintf('Final Temperature Error: %.2f °C\n', final_error);
% 清除变量(可选,为了保持工作空间整洁)
clearvars -except t set_temp room_temp error pid_output prev_error integral Kp Ki Kd dt t_final tau 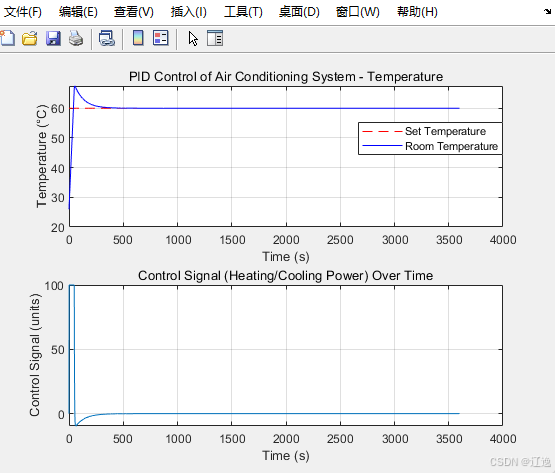

















 2096
2096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









