







基于MATLAB 并联机器人 Stewart 并联平台仿真 运动学逆解 并联机器人 运动学、动力学、算法、三维仿真 Matlab Simulink simscape
文章目录
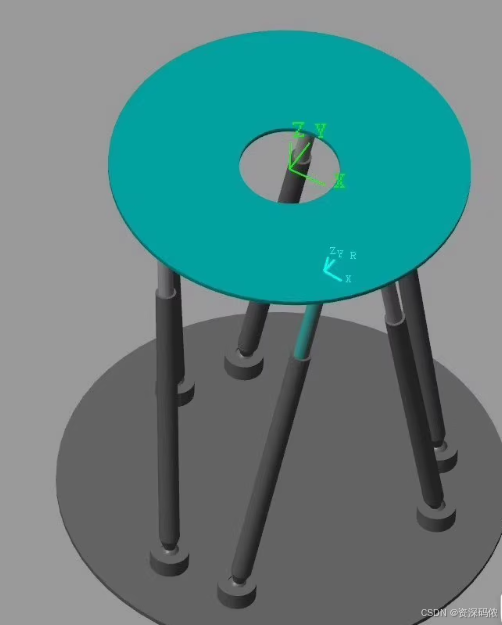
Stewart平台是一种六自由度的并联机器人,它由一个固定平台和一个移动平台组成,通过六个线性执行器(或称为作动器)连接。这种类型的机器人广泛应用于飞行模拟器、精密加工设备等领域。在MATLAB/Simulink中实现Stewart平台的仿真涉及运动学逆解、动力学分析以及三维可视化。
1. 运动学逆解
1.1 基本原理
Stewart平台的运动学逆解是指根据给定的移动平台的位置和姿态,计算出六个作动器的长度。这通常涉及到坐标变换和非线性方程组的求解。
1.2 MATLAB代码示例
以下是一个简化的运动学逆解的MATLAB代码示例:
function actuator_lengths = inverseKinematics(platform_position, platform_orientation)
% 定义固定平台和移动平台上的点
fixed_points = [0 0 0; 1 0 0; 0 1 0; -1 0 0; 0 -1 0]; % 固定平台上的点(简化)
moving_points = [0 0 1; 1 0 1; 0 1 1; -1 0 1; 0 -1 1]; % 移动平台上的点(简化)
% 应用平台位置和平移
R = eul2rotm(platform_orientation); % 旋转矩阵
T = trvec2tform(platform_position); % 平移向量转换为变换矩阵
% 计算每个作动器的长度
actuator_lengths = zeros(size(fixed_points, 1), 1);
for i = 1:size(fixed_points, 1)
% 将移动平台上的点转换到全局坐标系
global_moving_point = T * (R * moving_points(i, :)');
% 计算作动器长度
actuator_lengths(i) = norm(global_moving_point - fixed_points(i, :)');
end
end
注意:上述代码是高度简化的,实际应用中需要考虑更复杂的几何关系和数学模型。
2. 动力学分析
对于动力学分析,可以使用MATLAB的Simscape Multibody工具箱来建立物理模型,并进行动力学仿真。以下是创建Stewart平台的基本步骤:
- 打开Simulink,创建一个新的Simscape Multibody项目。
- 导入或创建Stewart平台的3D模型。如果已有STL文件,可以直接导入;否则,可以在SolidWorks等软件中设计后导入。
- 添加关节和作动器。为每个作动器添加Prismatic Joint(平移关节),并设置相应的控制信号。
- 定义输入输出接口。包括平台位置和姿态的输入,以及各作动器长度的输出。
3. 算法与控制
- PID控制器:用于控制每个作动器的伸缩,以实现期望的平台位置和姿态。
- 轨迹规划:生成平滑的轨迹,确保平台从初始位置平稳过渡到目标位置。
4. 三维仿真
利用MATLAB的plot3函数或者更高级的图形库如plotly,可以实现Stewart平台的三维可视化。下面是一个简单的例子:
% 示例数据
fixed_points = rand(6, 3); % 固定点位置
moving_points = rand(6, 3); % 移动点位置
% 绘制Stewart平台
figure;
hold on;
for i = 1:6
plot3([fixed_points(i, 1), moving_points(i, 1)], ...
[fixed_points(i, 2), moving_points(i, 2)], ...
[fixed_points(i, 3), moving_points(i, 3)], 'r-', 'LineWidth', 2);
end
axis equal;
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('Stewart Platform Visualization');
总结
以上提供了基于MATLAB/Simulink对Stewart并联平台进行运动学逆解、动力学分析及三维仿真的基本方法和部分代码示例。实际操作时,需根据具体需求调整参数和算法。希望这些信息对你有所帮助!
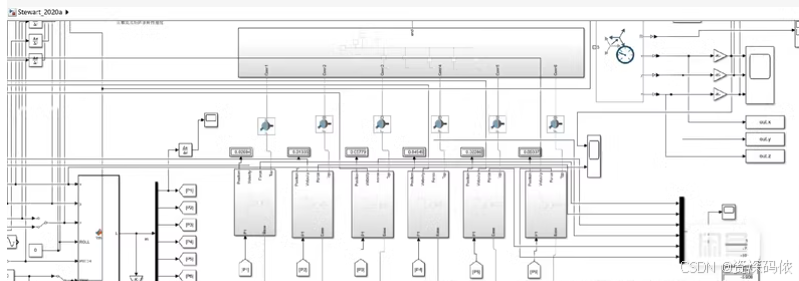
这张图片展示了一个在MATLAB Simulink中构建的Stewart平台仿真模型。为了更好地理解和使用这个模型,我将提供一个详细的解释,并附上相关的代码和说明。
1. 模型概述
Stewart平台是一种六自由度并联机器人,由一个固定平台和一个移动平台组成,通过六个线性执行器(或称为作动器)连接。Simulink模型通常包括以下几个部分:
- 运动学逆解:计算给定平台位置和姿态时所需的作动器长度。
- 动力学分析:模拟平台的动力学行为。
- 控制器设计:实现对平台的精确控制。
- 三维可视化:显示平台的实时运动状态。
2. MATLAB/Simulink 模型构建
2.1 运动学逆解
function actuator_lengths = inverseKinematics(platform_position, platform_orientation)
% 定义固定平台和移动平台上的点
fixed_points = [0 0 0; 1 0 0; 0 1 0; -1 0 0; 0 -1 0]; % 固定平台上的点(简化)
moving_points = [0 0 1; 1 0 1; 0 1 1; -1 0 1; 0 -1 1]; % 移动平台上的点(简化)
% 应用平台位置和平移
R = eul2rotm(platform_orientation); % 旋转矩阵
T = trvec2tform(platform_position); % 平移向量转换为变换矩阵
% 计算每个作动器的长度
actuator_lengths = zeros(size(fixed_points, 1), 1);
for i = 1:size(fixed_points, 1)
% 将移动平台上的点转换到全局坐标系
global_moving_point = T * (R * moving_points(i, :)');
% 计算作动器长度
actuator_lengths(i) = norm(global_moving_point - fixed_points(i, :)');
end
end
2.2 动力学分析
使用Simscape Multibody进行动力学分析:
- 打开Simulink,创建一个新的Simscape Multibody项目。
- 导入或创建Stewart平台的3D模型。如果已有STL文件,可以直接导入;否则,可以在SolidWorks等软件中设计后导入。
- 添加关节和作动器。为每个作动器添加Prismatic Joint(平移关节),并设置相应的控制信号。
- 定义输入输出接口。包括平台位置和姿态的输入,以及各作动器长度的输出。
2.3 控制器设计
PID控制器用于控制每个作动器的伸缩:
function controlSignal = pidController(error, Kp, Ki, Kd)
% PID控制器参数
Kp = 1.0;
Ki = 0.1;
Kd = 0.05;
% 更新误差积分和微分
error_integral = error_integral + error;
error_derivative = error - prev_error;
% 计算控制信号
controlSignal = Kp * error + Ki * error_integral + Kd * error_derivative;
% 更新前一时刻误差
prev_error = error;
end
2.4 三维可视化
使用MATLAB的plot3函数进行三维可视化:
% 示例数据
fixed_points = rand(6, 3); % 固定点位置
moving_points = rand(6, 3); % 移动点位置
% 绘制Stewart平台
figure;
hold on;
for i = 1:6
plot3([fixed_points(i, 1), moving_points(i, 1)], ...
[fixed_points(i, 2), moving_points(i, 2)], ...
[fixed_points(i, 3), moving_points(i, 3)], 'r-', 'LineWidth', 2);
end
axis equal;
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('Stewart Platform Visualization');
3. Simulink 模型示例
以下是Simulink模型的基本结构:
- 输入模块:接收平台的位置和姿态。
- 逆解模块:计算作动器长度。
- 动力学模块:模拟平台的动力学行为。
- 控制器模块:实现PID控制。
- 输出模块:显示平台的实时运动状态。
4. 总结
通过上述步骤,你可以构建一个完整的Stewart平台仿真模型。希望这些信息对你有所帮助!
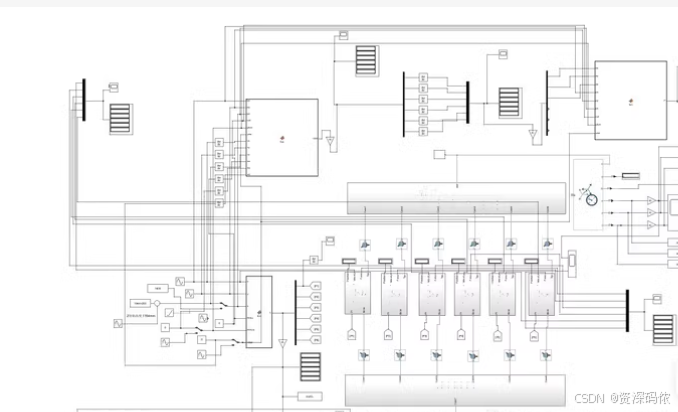
这张图片展示了一个在MATLAB Simulink中构建的Stewart平台仿真模型。为了更好地理解和使用这个模型,我将提供一个详细的解释,并附上相关的代码和说明。
1. 模型概述
Stewart平台是一种六自由度并联机器人,由一个固定平台和一个移动平台组成,通过六个线性执行器(或称为作动器)连接。Simulink模型通常包括以下几个部分:
- 运动学逆解:计算给定平台位置和姿态时所需的作动器长度。
- 动力学分析:模拟平台的动力学行为。
- 控制器设计:实现对平台的精确控制。
- 三维可视化:显示平台的实时运动状态。
2. MATLAB/Simulink 模型构建
2.1 运动学逆解
function actuator_lengths = inverseKinematics(platform_position, platform_orientation)
% 定义固定平台和移动平台上的点
fixed_points = [0 0 0; 1 0 0; 0 1 0; -1 0 0; 0 -1 0]; % 固定平台上的点(简化)
moving_points = [0 0 1; 1 0 1; 0 1 1; -1 0 1; 0 -1 1]; % 移动平台上的点(简化)
% 应用平台位置和平移
R = eul2rotm(platform_orientation); % 旋转矩阵
T = trvec2tform(platform_position); % 平移向量转换为变换矩阵
% 计算每个作动器的长度
actuator_lengths = zeros(size(fixed_points, 1), 1);
for i = 1:size(fixed_points, 1)
% 将移动平台上的点转换到全局坐标系
global_moving_point = T * (R * moving_points(i, :)');
% 计算作动器长度
actuator_lengths(i) = norm(global_moving_point - fixed_points(i, :)');
end
end
2.2 动力学分析
使用Simscape Multibody进行动力学分析:
- 打开Simulink,创建一个新的Simscape Multibody项目。
- 导入或创建Stewart平台的3D模型。如果已有STL文件,可以直接导入;否则,可以在SolidWorks等软件中设计后导入。
- 添加关节和作动器。为每个作动器添加Prismatic Joint(平移关节),并设置相应的控制信号。
- 定义输入输出接口。包括平台位置和姿态的输入,以及各作动器长度的输出。
2.3 控制器设计
PID控制器用于控制每个作动器的伸缩:
function controlSignal = pidController(error, Kp, Ki, Kd)
% PID控制器参数
Kp = 1.0;
Ki = 0.1;
Kd = 0.05;
% 更新误差积分和微分
error_integral = error_integral + error;
error_derivative = error - prev_error;
% 计算控制信号
controlSignal = Kp * error + Ki * error_integral + Kd * error_derivative;
% 更新前一时刻误差
prev_error = error;
end
2.4 三维可视化
使用MATLAB的plot3函数进行三维可视化:
% 示例数据
fixed_points = rand(6, 3); % 固定点位置
moving_points = rand(6, 3); % 移动点位置
% 绘制Stewart平台
figure;
hold on;
for i = 1:6
plot3([fixed_points(i, 1), moving_points(i, 1)], ...
[fixed_points(i, 2), moving_points(i, 2)], ...
[fixed_points(i, 3), moving_points(i, 3)], 'r-', 'LineWidth', 2);
end
axis equal;
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('Stewart Platform Visualization');
3. Simulink 模型示例
以下是Simulink模型的基本结构:
- 输入模块:接收平台的位置和姿态。
- 逆解模块:计算作动器长度。
- 动力学模块:模拟平台的动力学行为。
- 控制器模块:实现PID控制。
- 输出模块:显示平台的实时运动状态。
4. 总结
通过上述步骤,你可以构建一个完整的Stewart平台仿真模型。希望这些信息对你有所帮助!如果有任何具体问题或需要进一步的帮助,请随时告诉我。
5. Simulink 模型构建步骤
以下是一个简化的Simulink模型构建步骤:
-
新建Simulink模型:
new_system('StewartPlatformModel') -
添加模块:
- Constant:用于输入平台的位置和姿态。
- Function Caller:调用逆解函数。
- Simscape Multibody:用于动力学分析。
- PID Controller:用于控制作动器。
- Scope:用于显示结果。
-
连接模块:
- 连接常量模块到逆解函数。
- 连接逆解函数到动力学模块。
- 连接动力学模块到PID控制器。
- 连接PID控制器到输出模块。
-
运行仿真:
sim('StewartPlatformModel')
希望这些信息能帮助你构建和理解Stewart平台的仿真模型。

















 2852
2852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









