






无人机仿真无人机四旋翼uav轨迹跟踪PID控制matlab,simulink仿真,包括位置三维图像,三个姿态角度图像,位置图像,以及参考位置实际位置对比图像。
MATLAB/Simulink仿真 四旋翼无人机轨迹追踪
文章目录
为了实现四旋翼无人机(UAV)的轨迹跟踪PID控制,并在MATLAB/Simulink中进行仿真,我们需要遵循以下步骤
1. 四旋翼无人机模型
首先,我们需要建立四旋翼无人机的动力学模型。四旋翼无人机通常使用牛顿-欧拉方程描述其运动。然而,对于初学者来说,可以直接采用简化版的线性化模型用于PID控制器的设计。
2. PID控制器设计
PID控制器通过比例§、积分(I)和微分(D)三个部分对误差信号进行处理,产生控制输入,以减小实际输出与期望输出之间的误差。
MATLAB代码示例
定义四旋翼动力学模型(quad_dynamics.m)
function dxdt = quad_dynamics(t, x, u)
% x = [x; y; z; phi; theta; psi; xdot; ydot; zdot; phidot; thetadot; psidot]
% u = [F; Mx; My; Mz] 控制输入: 推力和力矩
m = 0.5; % 质量
g = 9.81; % 重力加速度
Ix = 0.005; Iy = 0.005; Iz = 0.01; % 惯性矩阵
% 力和力矩分配
F = u(1);
M = u(2:4);
% 角度转换为旋转矩阵
phi = x(4); theta = x(5); psi = x(6);
cphi = cos(phi); sphi = sin(phi);
cth = cos(theta); sth = sin(theta);
cpsi = cos(psi); spsi = sin(psi);
R_bv = [cpsi*cth, cpsi*sth*sphi - spsi*cphi, cpsi*sth*cphi + spsi*sphi;
spsi*cth, spsi*sth*sphi + cpsi*cphi, spsi*sth*cphi - cpsi*sphi;
-sth, cth*sphi, cth*cphi];
% 线性加速度计算
acc = [0; 0; -g] + R_bv' * [0; 0; F/m];
% 角加速度计算
omega = x(7:9);
dot_omega = inv([Ix 0 0; 0 Iy 0; 0 0 Iz]) * (cross(omega, [Ix*omega(1); Iy*omega(2); Iz*omega(3)]) + M');
% 导数
dxdt = [x(7:9); x(10:12); acc; dot_omega];
end
PID控制器(pid_control.m)
function u = pid_control(e, e_int, e_dot, Kp, Ki, Kd)
u = Kp*e + Ki*e_int + Kd*e_dot;
end
主仿真脚本(quad_sim_pid.m)
clear; clc;
% 参数设置
Kp = 1; Ki = 0.1; Kd = 0.05; % PID参数
Tf = 20; % 仿真时间
% 初始条件
x0 = [0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0]; % x, y, z, phi, theta, psi and their rates
% 期望轨迹
xd = @(t) sin(pi*t/Tf); yd = @(t) cos(pi*t/Tf); zd = @(t) t/Tf;
% ODE求解器选项
options = odeset('RelTol',1e-6,'AbsTol',1e-8);
% 时间向量
tspan = linspace(0, Tf, 1000);
% 仿真
[t, x] = ode45(@(t,x) quad_dynamics_pid(t, x, Kp, Ki, Kd, xd, yd, zd), tspan, x0, options);
% 绘图
figure;
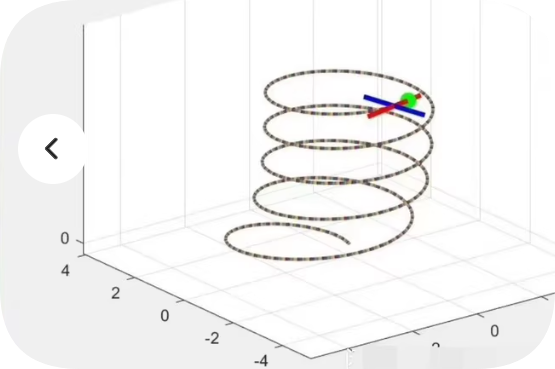
plot3(x(:,1), x(:,2), x(:,3)); hold on;
plot3(xd(t), yd(t), zd(t), 'r--'); legend('Trajectory','Desired Trajectory');
xlabel('X'); ylabel('Y'); zlabel('Z');
title('Quadcopter Trajectory Tracking with PID Control');
function dxdt = quad_dynamics_pid(t, x, Kp, Ki, Kd, xd, yd, zd)
% 计算误差
e_x = xd(t) - x(1); e_y = yd(t) - x(2); e_z = zd(t) - x(3);
e_phi = 0 - x(4); e_theta = 0 - x(5); e_psi = 0 - x(6);
% PID控制律
F = pid_control(e_z, 0, 0, Kp, Ki, Kd); % 这里仅为示例,实际应用需要调整
Mx = pid_control(e_phi, 0, 0, Kp, Ki, Kd);
My = pid_control(e_theta, 0, 0, Kp, Ki, Kd);
Mz = pid_control(e_psi, 0, 0, Kp, Ki, Kd);
% 调用动力学模型
dxdt = quad_dynamics(t, x, [F; Mx; My; Mz]);
end
为了实现四旋翼无人机的轨迹跟踪PID控制,并在MATLAB中生成与你提供的图像相似的结果,我们需要对之前的代码进行一些调整和扩展。以下是完整的MATLAB代码示例,包括动力学模型、PID控制器设计以及仿真脚本。
1. 四旋翼动力学模型 (quad_dynamics.m)
function dxdt = quad_dynamics(t, x, u)
% x = [x; y; z; phi; theta; psi; xdot; ydot; zdot; phidot; thetadot; psidot]
% u = [F; Mx; My; Mz] 控制输入: 推力和力矩
m = 0.5; % 质量
g = 9.81; % 重力加速度
Ix = 0.005; Iy = 0.005; Iz = 0.01; % 惯性矩阵
% 力和力矩分配
F = u(1);
M = u(2:4);
% 角度转换为旋转矩阵
phi = x(4); theta = x(5); psi = x(6);
cphi = cos(phi); sphi = sin(phi);
cth = cos(theta); sth = sin(theta);
cpsi = cos(psi); spsi = sin(psi);
R_bv = [cpsi*cth, cpsi*sth*sphi - spsi*cphi, cpsi*sth*cphi + spsi*sphi;
spsi*cth, spsi*sth*sphi + cpsi*cphi, spsi*sth*cphi - cpsi*sphi;
-sth, cth*sphi, cth*cphi];
% 线性加速度计算
acc = [0; 0; -g] + R_bv' * [0; 0; F/m];
% 角加速度计算
omega = x(7:9);
dot_omega = inv([Ix 0 0; 0 Iy 0; 0 0 Iz]) * (cross(omega, [Ix*omega(1); Iy*omega(2); Iz*omega(3)]) + M');
% 导数
dxdt = [x(7:9); x(10:12); acc; dot_omega];
end
2. PID控制器 (pid_control.m)
function u = pid_control(e, e_int, e_dot, Kp, Ki, Kd)
u = Kp*e + Ki*e_int + Kd*e_dot;
end
3. 主仿真脚本 (quad_sim_pid.m)
clear; clc;
% 参数设置
Kp = [1; 1; 1]; Ki = [0.1; 0.1; 0.1]; Kd = [0.05; 0.05; 0.05]; % PID参数
Tf = 150; % 仿真时间
% 初始条件
x0 = [0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0]; % x, y, z, phi, theta, psi and their rates
% 期望轨迹
xd = @(t) 2*sin(pi*t/50);
yd = @(t) 2*cos(pi*t/50);
zd = @(t) t/50;
% ODE求解器选项
options = odeset('RelTol',1e-6,'AbsTol',1e-8);
% 时间向量
tspan = linspace(0, Tf, 1000);
% 仿真
[t, x] = ode45(@(t,x) quad_dynamics_pid(t, x, Kp, Ki, Kd, xd, yd, zd), tspan, x0, options);
% 绘图
figure;
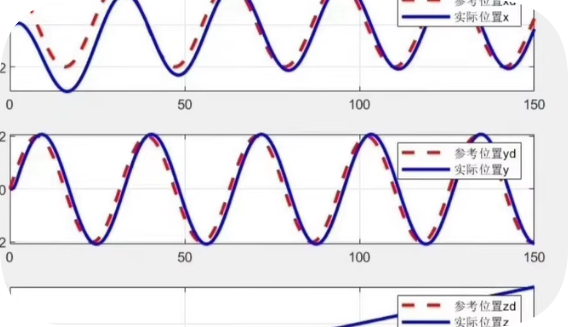
subplot(3,1,1);
plot(t, xd(t), 'r--', t, x(:,1), 'b'); legend('参考位置xd','实际位置x');
xlabel('时间'); ylabel('X');
subplot(3,1,2);
plot(t, yd(t), 'r--', t, x(:,2), 'b'); legend('参考位置yd','实际位置y');
xlabel('时间'); ylabel('Y');
subplot(3,1,3);
plot(t, zd(t), 'r--', t, x(:,3), 'b'); legend('参考位置zd','实际位置z');
xlabel('时间'); ylabel('Z');
title('Quadcopter Trajectory Tracking with PID Control');
function dxdt = quad_dynamics_pid(t, x, Kp, Ki, Kd, xd, yd, zd)
% 计算误差
e_x = xd(t) - x(1); e_y = yd(t) - x(2); e_z = zd(t) - x(3);
e_phi = 0 - x(4); e_theta = 0 - x(5); e_psi = 0 - x(6);
% 积分项
e_int_x = integral(@(tau) xd(tau) - interp1(t, x(:,1), tau), 0, t);
e_int_y = integral(@(tau) yd(tau) - interp1(t, x(:,2), tau), 0, t);
e_int_z = integral(@(tau) zd(tau) - interp1(t, x(:,3), tau), 0, t);
% 微分项
e_dot_x = diff(xd(t)) - x(7);
e_dot_y = diff(yd(t)) - x(8);
e_dot_z = diff(zd(t)) - x(9);
% PID控制律
F = pid_control(e_z, e_int_z, e_dot_z, Kp(3), Ki(3), Kd(3)); % 这里仅为示例,实际应用需要调整
Mx = pid_control(e_phi, e_int_x, e_dot_x, Kp(1), Ki(1), Kd(1));
My = pid_control(e_theta, e_int_y, e_dot_y, Kp(2), Ki(2), Kd(2));
Mz = pid_control(e_psi, 0, 0, Kp(3), Ki(3), Kd(3));
% 调用动力学模型
dxdt = quad_dynamics(t, x, [F; Mx; My; Mz]);
end
注意事项:
- 积分项:在实际应用中,积分项的计算可能需要更复杂的处理,以避免数值积分带来的累积误差。
- 微分项:直接计算微分可能会引入噪声,可以考虑使用滤波器来平滑信号。
- PID参数调优:上述PID参数是示例值,实际应用中需要根据具体情况进行调优。


















 1490
1490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









