







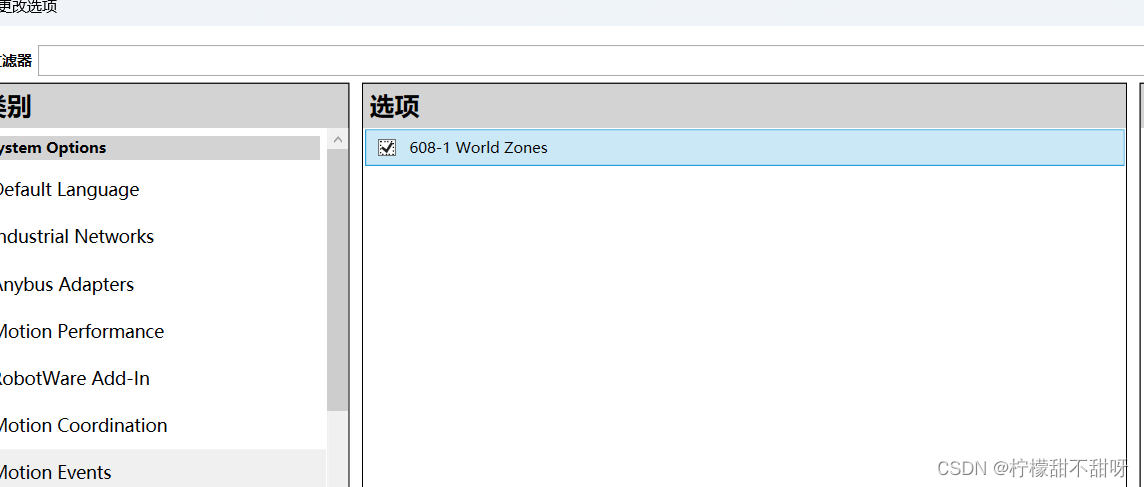
一、添加ABB机器人干涉区功能选项包
需要使用ABB机器人干涉区的功能,需要机器人配置608-1world zone功能项
也可在示教器上查看是否安装干涉区的软件功能

二、创建干涉区指令
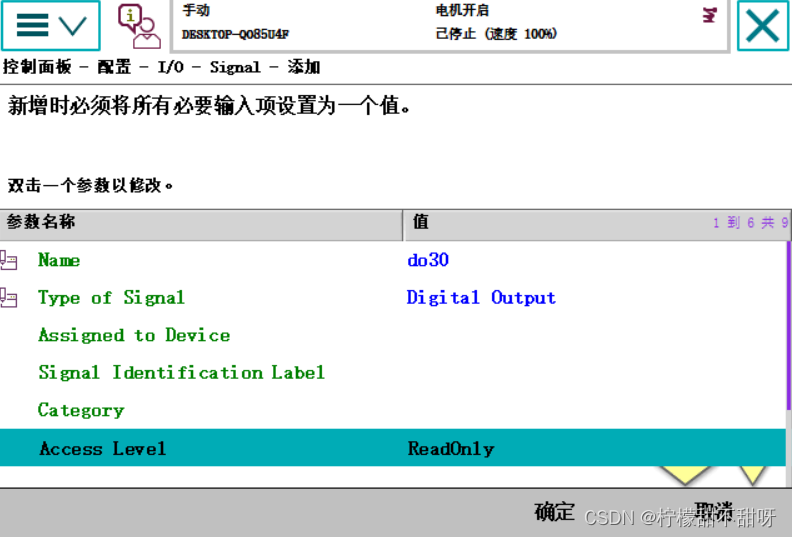
创建输出信号,并将信号定义为不可干预的模式
添加一个创建干涉区的子程序,在子程序中添加干涉区指令
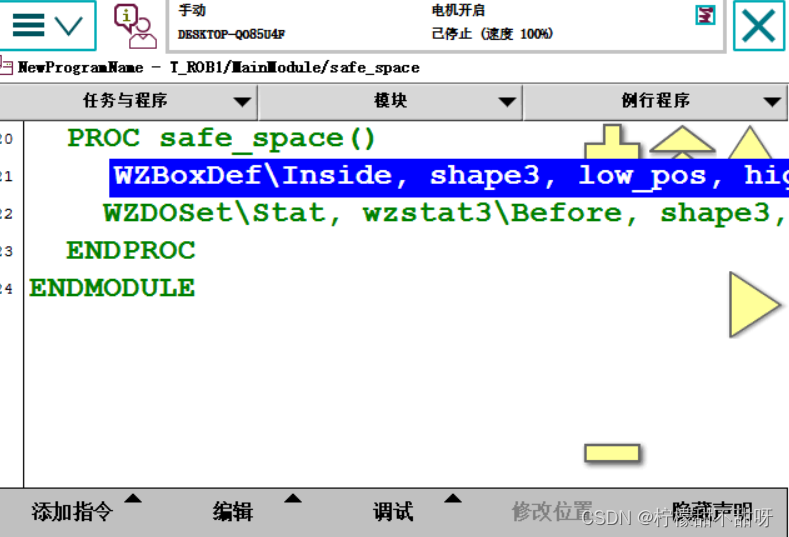
WZBoxDef - 定义一个箱形全局区域
WZCylDef - 定义圆柱形全局区域
WZDisable - 停用临时全局区域监控
WZDOSet - 启用全局区域,设置数字信号输出
WZEnable - 启用临时全局区域监控
WZFree - 擦除临时全局区域监控
WZHomeJointDef - 定义内部接头的全局区域
WZLimJointDef - 定义有
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 910
910

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









