







 本文介绍了机器人干涉区的概念及其设定方法,包括内侧和外侧的区别,以及如何通过输出信号与输入信号来控制机器人在特定区域内的移动。对于空间概念较弱的人员,建议使用仿真软件辅助设置。
本文介绍了机器人干涉区的概念及其设定方法,包括内侧和外侧的区别,以及如何通过输出信号与输入信号来控制机器人在特定区域内的移动。对于空间概念较弱的人员,建议使用仿真软件辅助设置。
- 干涉区是机器人和第三方设备共同使用的区域,机器人或第三方设备正在使用时,另一方不可进入
- 干涉区的设定
输出信号与输入信号的设置,由自己定义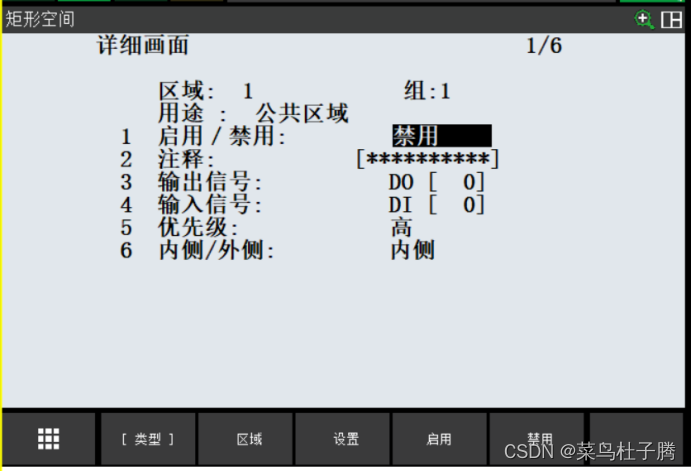
内侧和外侧的区别在于:
内侧:允许机器人在箱型区域外部移动,如果没有信号输入,则不允许进入该箱型区域。
外侧:允许机器人在箱型区域内部移动,如果没有信号输入,则不允许进入该箱型区域以外的地方。
内侧:机器人进入干涉区后输出信号断开,离开干涉区域后信号接通。
外侧:机器人处于干涉区内部信号接通,离开干涉区信号断开。
空间感不强的话可以在仿真软件里对干涉区进行设定,方便确认干涉区域是否设置正确

















 6802
6802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









