







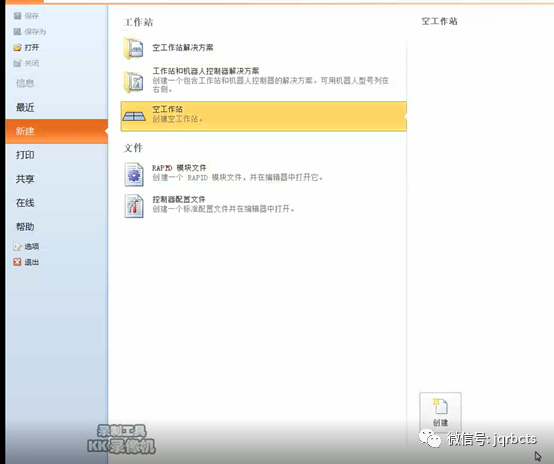
选择新建-空工作站-创建
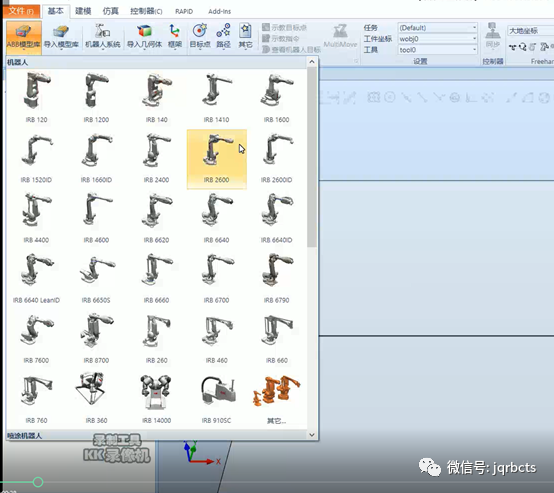
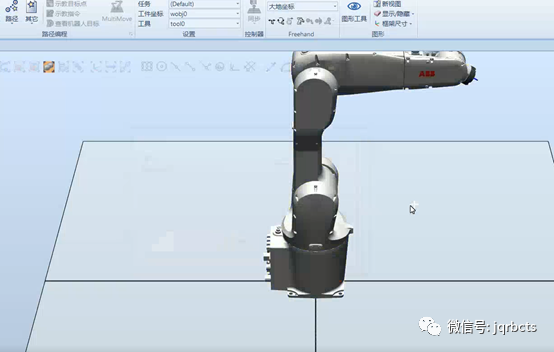
选择ABB模型库-选择机器人类型

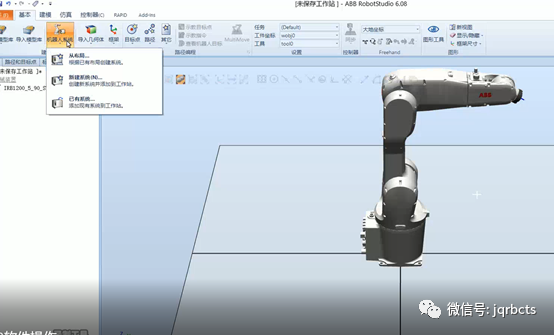
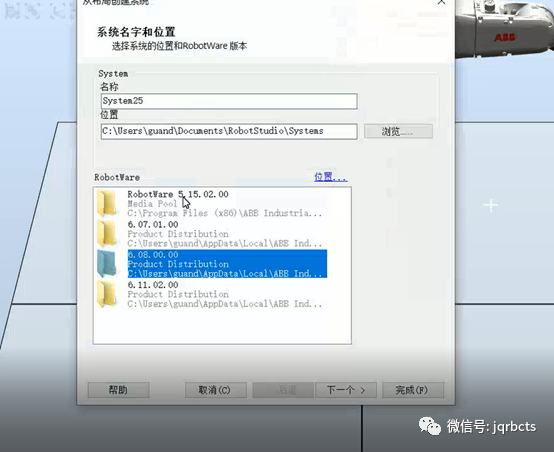
选择机器人系统-根据已有的布局建系统修改名称和版本号
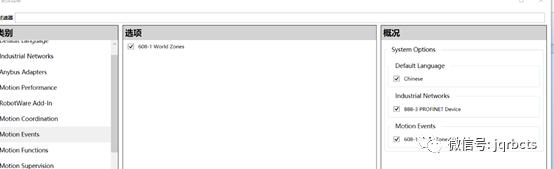
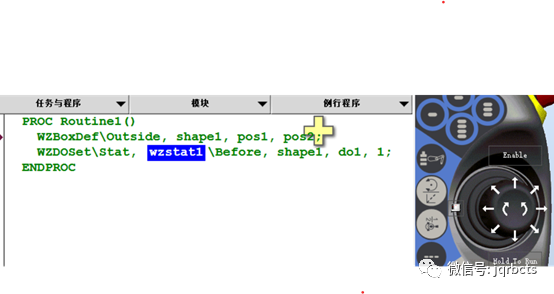
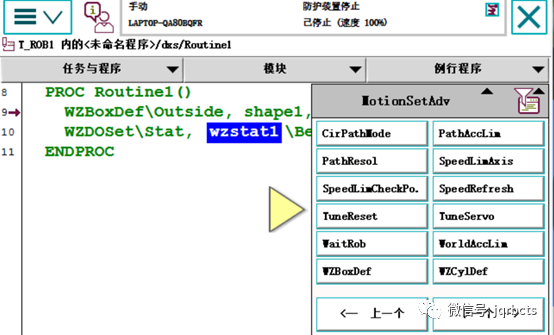
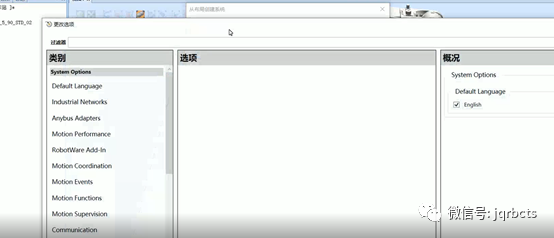
选择语言和网络,需要安全区域可以选择workzone,安全区域的设定,要在配置前设定608-1 world zones,可以设置机器人在干涉区内发信号
![]()
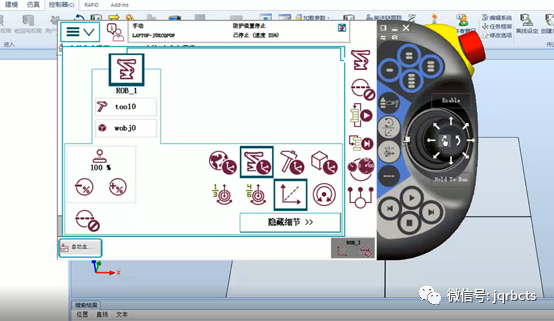
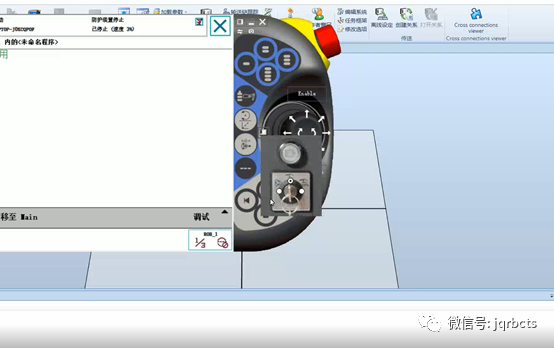
给电机上电点enable显示绿色和电机已开启选择好坐标系和速度就可以移动机器人
![]()
大家可以一起交流
选择新建-空工作站-创建
选择ABB模型库-选择机器人类型
选择机器人系统-根据已有的布局建系统修改名称和版本号
选择语言和网络,需要安全区域可以选择workzone,安全区域的设定,要在配置前设定608-1 world zones,可以设置机器人在干涉区内发信号
![]()
给电机上电点enable显示绿色和电机已开启选择好坐标系和速度就可以移动机器人
![]()
大家可以一起交流

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






















 985
985







