






基于模型预测MPC实现的车速控制,控制目标为燃油汽车,采用上下层控制器控制,上层mpc产生期望的加速度,下层采用自抗扰ADRC控制产生期望的节气门开度和制动压力,同时该算法可直接用于代码生成(可做实车试验实验),后续可以用于车速需求的控制(如acc,轨迹跟踪等)。
有对应复现资料。
YID:95200709281965904
想剁手书屋14
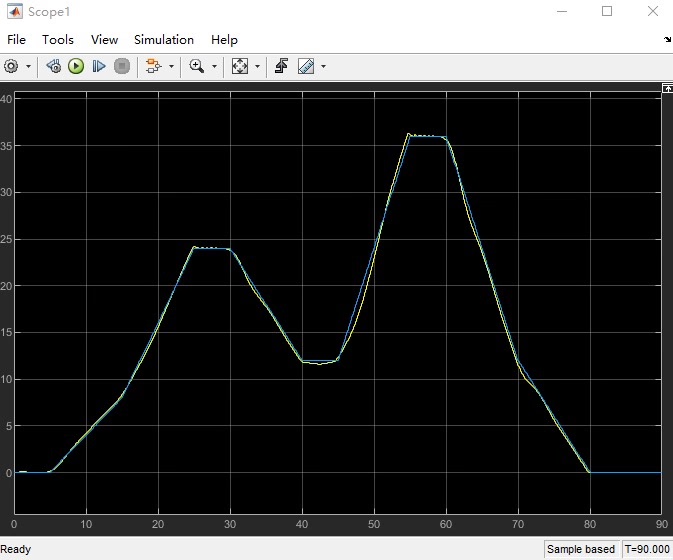
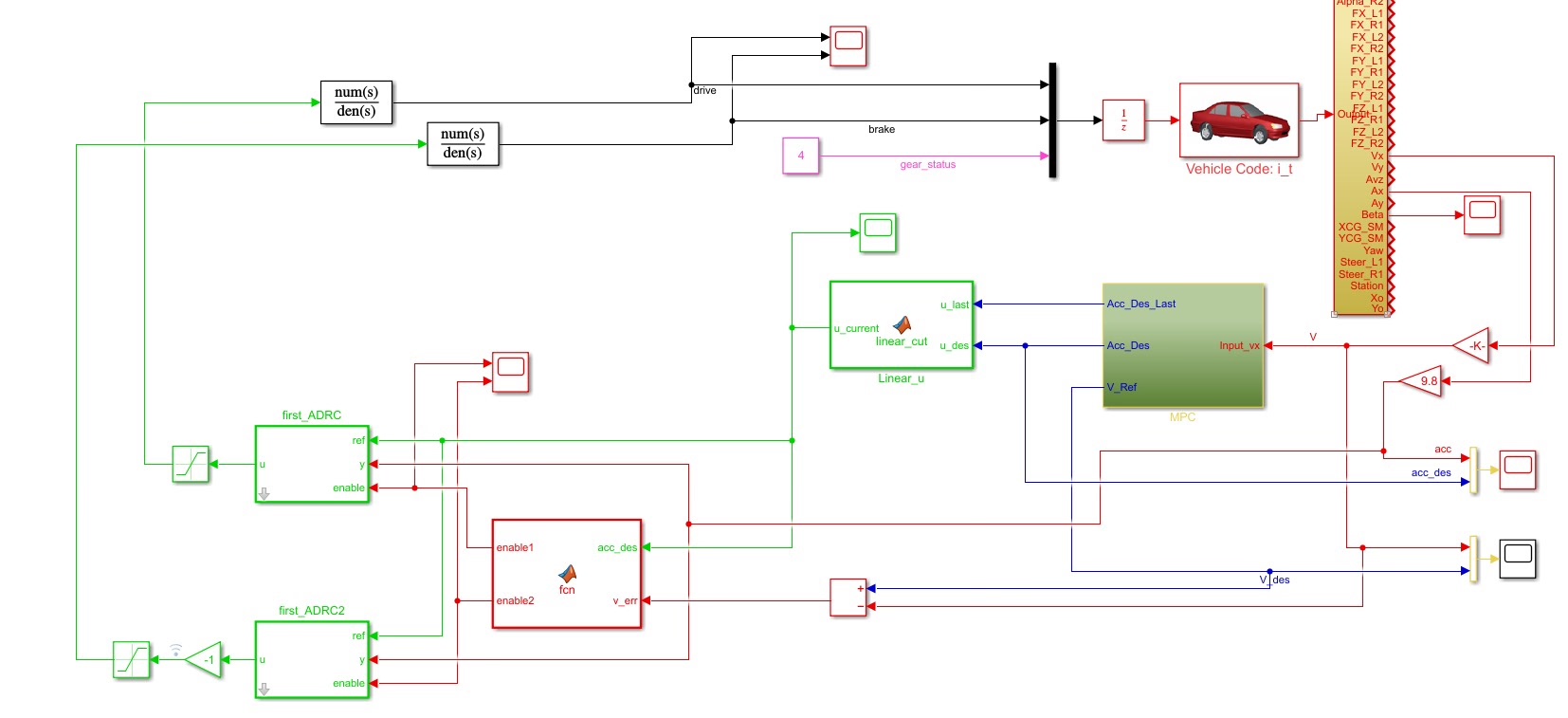
基于模型预测控制(Model Predictive Control,MPC)技术的车速控制系统,在燃油汽车上实现了高效准确的车速调节。该系统采用上下层控制器结构,上层控制器使用MPC算法生成期望的车辆加速度,下层控制器采用自抗扰ADRC(Active Disturbance Rejection Control)算法,控制燃油汽车的节气门开度和制动压力,从而实现精确的车速控制。
MPC是一种基于模型预测的控制策略,它在控制过程中使用车辆动力学模型进行预测,并根据预测结果优化控制器输出。在车速控制系统中,MPC算法通过对车辆运动方程的建模和车辆动力学参数的估计,预测出未来一段时间内车辆的加速度。根据期望的车辆加速度和当前车速之间的差值,MPC算法调节节气门开度和制动压力,以实现车速的准确调节。
为了进一步提高控制精度和鲁棒性,本系统引入了自抗扰ADRC算法作为下层控制器。ADRC算法采用观测器来估计外部扰动,并通过在控制过程中对扰动进行实时补偿,从而使系统对扰动具有强鲁棒性。在车速控制系统中,ADRC算法通过估计车辆运动中的外部扰动,例如坡道阻力、气温变化等,实时调节节气门开度和制动压力,以抵消扰动对车速控制的影响。
同时,该车速控制算法还具有代码生成的能力,可以直接应用于实际车辆的控制。通过将控制算法转化为可执行的代码,可以在实车试验中进行验证和优化。控制算法的代码生成不仅提高了算法的实时性和可靠性,还为后续的车速需求控制提供了基础。例如,该算法可以用于自适应巡航控制(Adaptive Cruise Control,ACC)和轨迹跟踪等应用场景,进一步提高驾驶员的驾驶体验和行车安全性。
综上所述,基于模型预测MPC实现的车速控制系统在燃油汽车上取得了良好的控制效果。通过上下层控制器的结构,该系统能够实现精确的车速调节和鲁棒性扰动补偿。此外,该系统支持代码生成,可直接应用于实车试验和后续的车速需求控制。通过该系统的应用,可以进一步提升燃油汽车的行车性能和驾驶体验。
(此处省略复现资料相关内容)
相关的代码,程序地址如下:http://nodep.cn/709281965904.html
















 1294
1294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









