






今天和大家分享一种创新的深度学习技术:小波变换与Mamba模型结合。 该技术通过引入小波变换,能有效提升模型在频域上的特征处理能力,利用小波的多尺度分解,确保图像中全局亮度与局部细节信息的精准提取,进一步提升了模型表现。同时,结合Mamba状态空间模型,能更好地捕捉图像中的长程依赖关系,提高推理效率。这种技术在图像分类、目标检测、语义分割等任务中展现了显著优势,特别是在计算机视觉(CV)领域,凭借其强大的性能和高效性,成为了一个新兴的研究热点,具有巨大的创新潜力。目前的研究成果已经显现出小波变换与Mamba结合的卓越效果。为了帮助大家节省查阅时间,我特别挑选了几篇最新的论文给大家参考,展示了该技术的创新思路及应用效果,有意向投稿的同学们可以抓紧机会哦
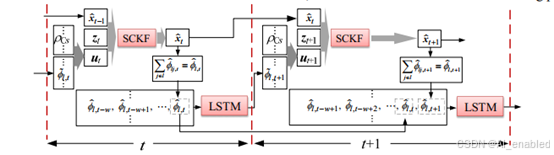
1、SCKF-LSTM Based Trajectory Tracking for Electricity-Gas Integrated Energy System
全文总结: 本文提出了一种基于平方根容积卡尔曼滤波器(SCKF)和长短期记忆网络(LSTM)结合的轨迹跟踪方法,用于电-气综合能源系统(IES)的动态状态精确跟踪与预测。方法通过对电力网络的动态轨迹预测采用Holt指数平滑技术,对天然气管网的非线性动态特性则使用偏微分方程(PDE)并利用Euler方法进行离散化,显著提高了跟踪精度与鲁棒性。
主要目的:
- 开发一种精准、高效且稳健的轨迹跟踪方法,以实现电力-天然气综合能源系统的动态状态实时监测与预测,为综合能源系统的智能化调度和优化提供关键支撑。
主要方法:
- 采用Holt指数平滑方法对电力系统电压相量进行预测;
- 利用非线性偏微分方程对天然气网络进行建模,结合Euler差分法进行离散化;
- 引入平方根容积卡尔曼滤波(SCKF)以解决非线性系统的数值不稳定性问题;
- 使用LSTM网络在每个时间步长预测天然气负荷,并结合SCKF算法实现状态的精确预测与校正。
结果:
- 通过IEEE-39节点电力系统和GasLib-40节点天然气网络的仿真验证,提出的方法相较于传统方法及线性化方法在动态轨迹跟踪精度上有明显优势;
- 量化分析显示本文方法的跟踪误差明显降低,鲁棒性显著提高,尤其在存在测量噪声及异常数据时表现良好。
创新性:
- 首次提出SCKF与LSTM融合的IES动态轨迹跟踪算法;
- 创新性地将物理模型(非线性PDE离散化)与数据驱动方法(Holt指数平滑和LSTM预测)结合,提升了状态跟踪的准确性;
- 改进了传统卡尔曼滤波方法在非线性强烈的系统下的表现,提高了系统跟踪的稳定性与可靠性。
未来研究方向:
- 进一步优化算法结构,提高实时计算性能,使其适用于更大规模的实际综合能源系统;
- 扩展所提出方法在更多类型的能源系统(如供热网络)和更广泛动态特性(如新能源接入)的应用;
- 结合边缘计算与分布式状态预测方法,实现更高效的实时动态状态估计和智能决策支持。
2、Data-Driven Approaches for Modelling Target Behaviour
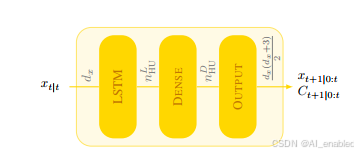
全文总结: 本文提出并比较了三种基于机器学习的数据驱动目标运动建模方法,用于改进单目标跟踪精度,包括高斯过程(GP)模型、优化的交互多模型(IMM)滤波器和基于长短时记忆(LSTM)的助记卡尔曼滤波器(MKF)。通过在仿真数据和实际数据(无人机、充气艇)上进行测试,证实了数据驱动方法相比传统的扩展卡尔曼滤波器(EKF)在处理复杂或未知目标动力学时具有明显优势。
主要目的:
- 探讨并评估数据驱动方法在目标运动建模方面的优势,以提高跟踪算法在非线性、复杂运动场景下的性能。
主要方法:
- 提出了三种不同的数据驱动跟踪算法:
- 使用高斯过程(GP)结合粒子滤波进行目标运动建模;
- 基于梯度下降优化交互多模型(IMM)滤波器参数,以适应目标的多模式动态变化;
- 结合LSTM网络的记忆卡尔曼滤波器(MKF),实现对目标状态的预测,从而放松了传统滤波器中马尔科夫假设的限制。
结果:
- 在仿真数据、无人机(UAV)和橡皮艇(RIB)三种场景中进行了性能测试,结果显示:
- GP在数据充足时表现良好,但对数据不充分或异质数据表现较差;
- 优化IMM滤波器在真实数据场景(UAV和RIB)中表现最佳,明显优于EKF;
- MKF在仿真场景表现优异,但对数据分布变化敏感;
- 整体来看,数据驱动方法相对于传统EKF,在复杂动态模型条件下能显著提高跟踪精度。
创新性:
- 提出了三种不同的数据驱动运动建模方法,并进行了全面比较;
- 首次在单目标跟踪框架下系统性地比较了GP、优化IMM与LSTM三类数据驱动方法;
- 通过梯度下降法优化IMM滤波参数,并创新性地将LSTM网络与卡尔曼滤波器融合,增强了对复杂动力学的建模能力。
未来研究方向:
- 探讨数据驱动模型在数据分布剧烈变化场景下的稳健性,进一步提高泛化性能;
- 开发混合模型,结合数据驱动方法与传统解析模型的优势,以实现更强的跟踪鲁棒性;
-
将所提出的机器学习框架扩展到多目标跟踪和更复杂传感器数据融合任务中。
3、An EnKF-LSTM Assimilation Algorithm for Crop Growth Model
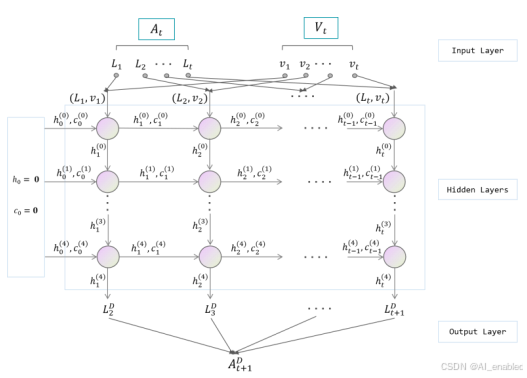
全文总结:本文提出了一种融合集成卡尔曼滤波(EnKF)与长短期记忆网络(LSTM)的数据同化算法(EnKF-LSTM),用于提高作物生长模型(WOFOST)的预测精度。通过综合模拟数据与现场传感器观测数据,有效解决了观测数据缺失和异常值导致的预测误差问题,并在水稻、玉米和大豆三种作物上验证了该方法的有效性与优越性。
主要目的:
- 开发一种高效的作物生长数据同化算法,以改善传统作物模型对复杂农田环境中生长状态的预测性能,特别是应对观测数据不完整、质量较差的问题。
主要方法:
- 首先使用WOFOST模型模拟作物生长过程,生成作物叶面积指数(LAI)数据;
- 采用EnKF算法初步同化现场观测数据和模型模拟结果,减小传统模型的误差;
- 在此基础上,进一步通过LSTM神经网络学习EnKF同化过程的非线性映射关系,有效处理模型与观测数据中的非高斯分布和非线性关系,提高预测性能;
- 针对EnKF的缺陷(如线性假设的局限性和数据缺失问题),提出二阶段EnKF-LSTM算法,以LSTM对EnKF结果进行二次精化。
结果:
- 在实际农田的水稻、玉米和大豆三种作物的LAI预测中,相比未同化数据、EnKF单独同化方法,以及CNN、GRU、FNN等其他神经网络同化方法,EnKF-LSTM均表现出明显优势;
- 在水稻数据中,EnKF-LSTM的预测误差(MSE)较未同化减少了96.71%,较单纯EnKF减少了88.29%;
- 玉米和大豆实验结果同样表明,EnKF-LSTM预测精度显著优于其他方法,尤其是在数据缺失较多或数据噪声较大的情况下优势更明显。
创新性:
- 提出了一种融合EnKF与LSTM的新型数据同化算法,首次应用于WOFOST作物模型中;
- 创新性地解决了传统EnKF方法在处理非线性数据及观测数据缺失时的不足;
- 有效利用LSTM神经网络的非线性建模能力,明显提高了作物生长模型的预测准确性与鲁棒性。
未来研究方向:
- 将EnKF-LSTM方法推广至其他作物生长指标的预测,如生物量、叶干重;
- 进一步研究在观测数据更为稀疏和噪声更大的环境下算法的稳定性;
- 研究将该算法应用于更大规模区域的农业数据同化和预测任务,实现精准农业的智能决策支持。
4、Fusing LSTM neural network and expanded disturbance Kalman filter for estimating external disturbing forces of ball screw drives
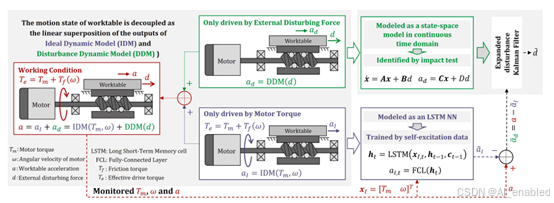
全文总结: 本文提出了一种融合长短期记忆(LSTM)神经网络与扩展干扰卡尔曼滤波器(EDKF)的混合驱动方法,用于有效估计滚珠丝杠传动装置中的外部干扰力。方法通过将工作台运动状态解耦为理想动态模型(IDM)与干扰动态模型(DDM)的输出叠加,利用LSTM建模IDM预测电机驱动下的运动状态,并通过EDKF基于DDM估计外部干扰力。通过仿真与真实实验数据验证,该方法能够以低成本、高精度的方式建立准确的外部干扰力估计模型。
主要目的:
- 开发一种通用、低成本且高精度的外部干扰力估计方法,用于提高滚珠丝杠传动装置的控制性能和交互安全性。
主要方法:
- 提出运动状态解耦方法,将滚珠丝杠系统运动状态表示为电机力矩驱动和外部干扰力驱动两部分;
- 利用LSTM神经网络建立理想动态模型(IDM),预测无干扰状态下的运动状态;
- 利用冲击试验简单获得干扰动态模型(DDM);
- 通过扩展干扰卡尔曼滤波(EDKF)算法实现对外部干扰力的实时估计。
结果:
- 在仿真与真实环境测试中,相较传统机制模型方法,所提出的混合驱动方法能够更精确地估计多种类型的外部干扰力;
- 通过实验验证,方法对于冲击干扰、多频率正弦干扰等复杂干扰的估计效果显著提高,展现出较强的泛化能力。
创新性:
- 首次提出将LSTM神经网络与扩展干扰卡尔曼滤波器融合,用于滚珠丝杠系统外部干扰力的估计;
- 提出了一种无需复杂外部干扰实验、仅依靠电机自激励实验与冲击测试即可快速建立估计模型的新方法;
- 创新性地将传统机制模型与数据驱动模型结合,有效解决了传统方法中因模型误差而导致的精度不足问题。
未来研究方向:
- 进一步结合基于力反馈的运动控制方法,持续提高滚珠丝杠传动装置的运动精度与安全性;
- 探讨所提方法在更广泛的运动控制场景,如多自由度机器人系统中的泛化应用;
- 深入研究算法在更高噪声环境和更复杂干扰条件下的性能优化方法。
5、Application of a long short‑term memory neural network algorithm fused with Kalman filter in UWB indoor positioning
全文总结: 本文提出了一种融合长短期记忆网络(LSTM)与卡尔曼滤波(KF)的算法(KF-LSTM),用于提升超宽带(UWB)室内定位的精度与稳定性。方法首先利用卡尔曼滤波处理UWB测距数据中的随机噪声,然后将处理后的数据输入到LSTM网络进行训练,以捕捉时间序列数据的特征,从而实现高精度定位。
主要目的:
- 提高UWB室内定位精度,克服室内环境中随机噪声与多路径干扰造成的误差,实现更加稳定可靠的定位效果。
主要方法:
- 结合卡尔曼滤波(KF)对UWB测距数据进行预处理,有效降低测距噪声;
- 利用LSTM网络处理KF滤波后的数据,以捕捉和学习UWB测距数据的时序依赖特性;
- 构建融合KF与LSTM(KF-LSTM)的混合模型,综合两种算法的优势,实现高精度定位。
结果:
- 仿真与实测结果表明,KF-LSTM算法的平均定位误差较BP算法、KF-BP算法、LSTM算法分别降低了71.31%、37.28%和49.31%;
- 在不同噪声水平条件下,KF-LSTM算法的稳定性和鲁棒性明显优于其他三种对比算法。
创新性:
- 提出了一种新的KF-LSTM算法框架,首次将LSTM与卡尔曼滤波结合应用于UWB室内定位;
- 创新性地利用卡尔曼滤波预处理数据,提高了LSTM网络对噪声数据的处理能力;
- 实现了数据驱动(LSTM)与状态估计(KF)方法的有效融合,提高了室内定位的精度与稳定性。
未来研究方向:
- 优化算法结构,缩短计算延迟,以提高实时性和扩大应用范围;
- 探讨算法在基站失联或数据缺失情况下的性能优化;
- 进一步研究KF-LSTM算法在更复杂室内环境以及多传感器融合定位中的泛化性能。
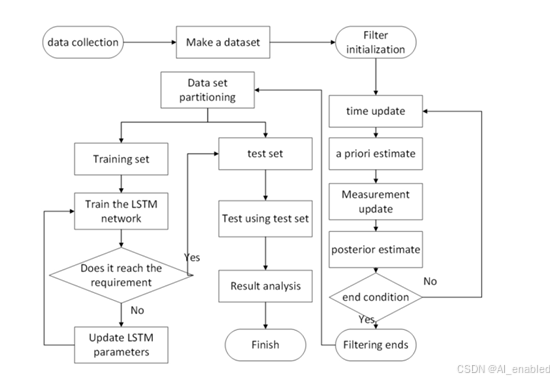
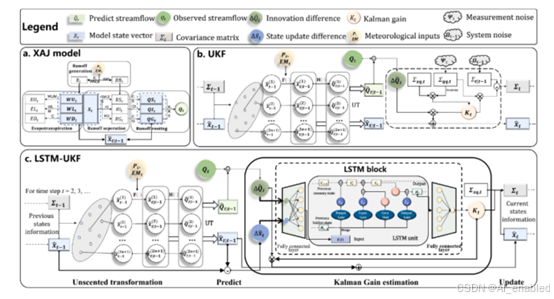
6、Enhancing physically-based flood forecasts through fusion of long short-term memory neural network with unscented Kalman filter
全文总结: 本文提出了一种融合长短期记忆(LSTM)神经网络与无迹卡尔曼滤波(UKF)的混合数据同化算法(LSTM-UKF),用于改进物理基础水文模型的洪水预报精度。该方法通过LSTM神经网络自适应地估计和学习无迹卡尔曼滤波中的噪声信息,避免了传统UKF对噪声统计的过度依赖。通过中国建溪流域与天邑流域实际观测数据的验证表明,LSTM-UKF能够显著提升多步提前洪水预报的准确性和稳定性。
主要目的:
- 开发一种有效提升洪水预报精度的新型数据同化方法,解决传统UKF算法对噪声统计特性敏感的问题,提高洪水预警的可靠性。
主要方法:
- 以新安江(XAJ)水文模型为基础,构建状态空间模型;
- 采用无迹卡尔曼滤波(UKF)算法进行状态更新;
- 提出结合LSTM神经网络动态估计卡尔曼增益,实时学习与跟踪非线性、非高斯噪声统计;
- 利用LSTM网络的长期依赖特性对卡尔曼增益自适应估计,实现更加鲁棒的洪水过程预报。
结果:
- 与传统UKF方法相比,LSTM-UKF方法显著提高了洪水预报精度,其中Nash-Sutcliffe效率系数(NSE)最高提升9.1%,均方根误差(RMSE)最大降低18.7%,平均绝对误差(MAE)最大降低22.6%;
- 在多步提前洪水预报(3小时步长)中,LSTM-UKF表现出更好的泛化能力与预测稳定性,特别是在高流量和极端洪水事件条件下优势明显。
创新性:
- 首次提出将LSTM深度神经网络直接融合到UKF算法中,用于解决噪声统计难以精确估计的技术瓶颈;
- 采用LSTM自适应估计卡尔曼增益,成功避免传统卡尔曼滤波对先验噪声信息的过度依赖;
- 提供了一种无需明确噪声统计假设、适用于复杂非线性系统的泛化框架。
未来研究方向:
- 进一步探索LSTM-UKF算法在更大范围、更复杂水文情境中的泛化应用;
- 提升算法的实时计算效率,适应实际洪水预警系统中的应用需求;
- 深入研究该融合算法在其他环境变量预测与水资源管理领域的扩展应用潜力。

















 674
674

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









