






今天给大家推荐一个发顶会新赛道:LSTM+卡尔曼滤波!
其把深度学习与传统滤波算法结合,克服了过往思路的诸多局限( 非线性数据处理能力差、动态适应性不足、噪声不明显……),为复杂时间序列预测和状态估计任务提供了新方案,且效果显著!有研究便通过改思路,在电力系统的动态状态估计任务中,取得了误差狂降5.99倍的优秀成果!
此外,其也拓展了滤波算法的应用范围,不仅以往的任务可以用该思路重做一遍;我们还可以结合新的场景,做微创新,可挖掘空间很广。
为让大家能够早点发出自己的顶会,我给大家准备了15种前沿创新思路,原文和源码都有,相信能够给你带来更多idea启发!
论文原文+开源代码需要的同学看文末
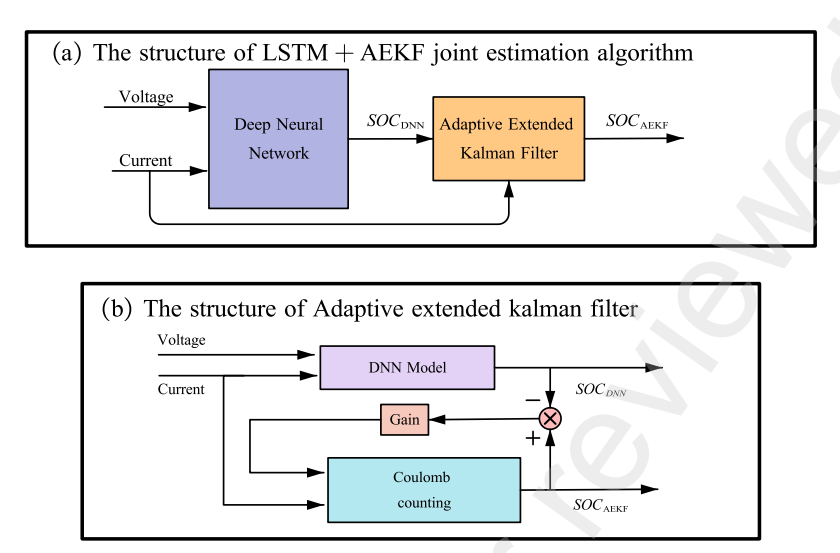
论文:State-of-charge estimation of Lithium-ion battery:Joint long short-term memory network and adaptive extended Kalman filter online estimation
内容
该论文提出了一种结合长短期记忆网络(LSTM-RNN)和自适应扩展卡尔曼滤波器(AEKF)的锂离子电池荷电状态(SOC)在线估计算法。该算法通过预训练的LSTM-RNN模型生成初始SOC估计值,并将其作为反馈输入到AEKF中进行修正,以实现高精度的SOC估计。
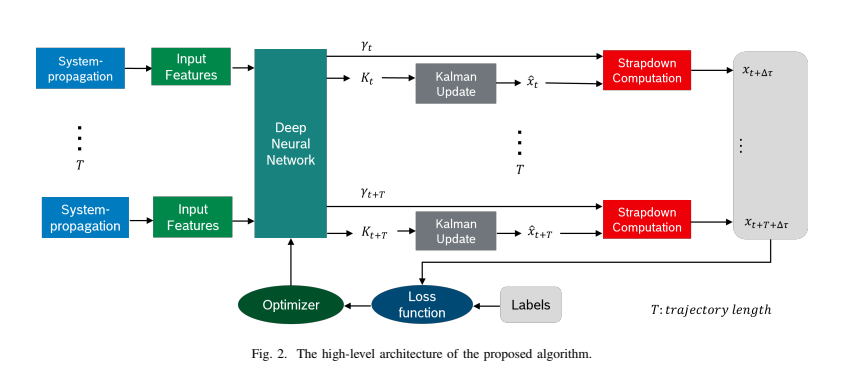
论文:Deep Learning Based Kalman Filter for GNSS/INS Integration: Neural Network Architecture and Feature Selection
内容
该论文提出了一种基于深度学习(DL)的卡尔曼滤波算法,用于全球导航卫星系统(GNSS)和惯性导航系统(INS)的融合。该算法通过将深度神经网络(DNN)嵌入到误差状态扩展卡尔曼滤波器(ES-EKF)中,学习系统的复杂动态特性,并优化卡尔曼增益以及惯性测量单元(IMU)的误差估计。
论文:Performance enhancement of diffuse fluorescence tomography based on an extended Kalman filtering-long short term memory neural network correction model
内容
该论文提出了一种基于扩展卡尔曼滤波(EKF)和长短期记忆(LSTM)神经网络的修正模型,用于提高扩散荧光层析成像(DFT)的图像重建性能。该方法通过结合EKF的先验信息和测量误差处理能力,以及LSTM对时间序列数据的挖掘能力,有效改善了DFT重建中的不适定性问题,提高了成像质量和速度。
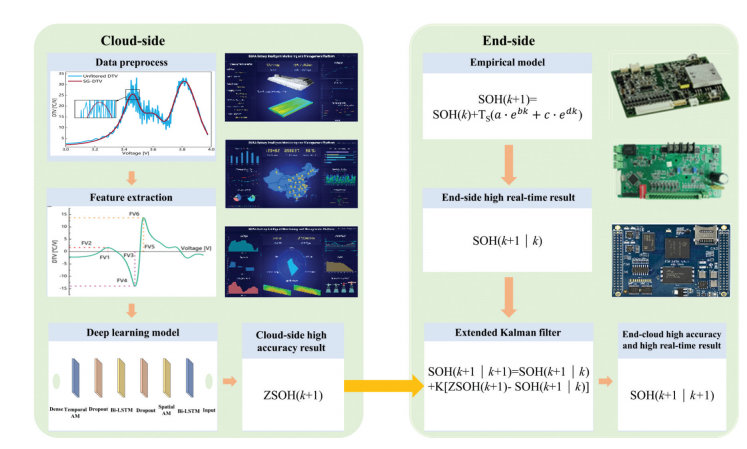
论文:An end-cloud collaboration approach for state-ofhealth estimation of lithium-ion batteries based on biLSTM with collaboration of multi-feature and attention mechanism
内容
该论文提出了一种基于端云协作的锂离子电池健康状态(SOH)估计方法,结合了云端的深度学习模型(基于双向长短期记忆网络Bi-LSTM和注意力机制)和端侧的快速经验模型(双指数模型),通过扩展卡尔曼滤波器(EKF)进行结果融合与迭代更新。该方法利用多特征分析(包括增量容量分析ICA和差分热伏安法DTV)提取与电池退化强相关的特征,确保模型输入的相关性和鲁棒性。
关注下方《人工智能学起来》
回复“长短卡尔曼”获取全部论文+开源代码
码字不易,欢迎大家点赞评论收藏

















 206
206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









