







在三维世界,一个模型要想最终呈现到一个照片上,需要经过三次矩阵变换,这三个矩阵分别是:
模型矩阵(World) - 视图矩阵(View)- 投影矩阵(Projection)
一. 模型矩阵
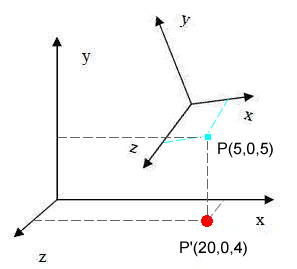
将 局部坐标系 下的模型坐标(相对于自身原点的坐标) 转化到 世界坐标系 下,通常称为World Matrix。
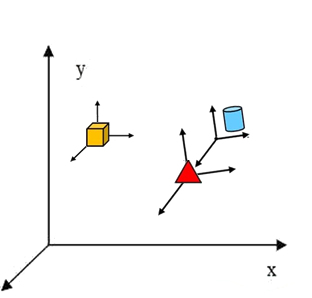
可以理解为把多个不同坐标系下的子模型统一到一个世界坐标空间。
局部坐标系(模型坐标) --> 世界坐标系
World_Matrix * [x,y,z] --> [x',y',z']
M * P[5,0,5] --> P[20,8,4] 对应下图中P点在世界坐标系下的坐标值。
二. 视图矩阵
将模型统一到一个坐标度量之后,需要将坐标变换到 观察者的视野范围内,也就是观测视角。
世界坐标系 --> 视图坐标系(观察者)
View_Matrix * [x',y',z'] --> [x'',y'',z'']
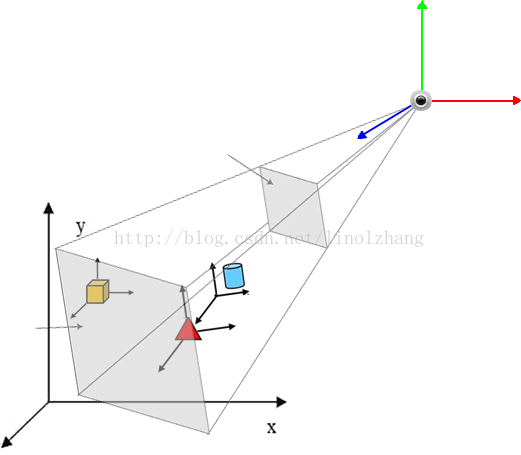
通过 视图矩阵 将场景中所有模型的 世界坐标 转化到 视图坐标系(如上图 RGB坐标轴)。
三. 投影矩阵
将 用户视图(Viewer) 下的坐标,经过透视投影进行成像,将三维空间变换到图像空间。
可以理解为 透视投影的成像,即从三维空间变换到图像空间。
视图坐标系 --> 图像坐标系(UV空间)
Projection_Matrix * [x'',y'',z''] --> [U,V,1]
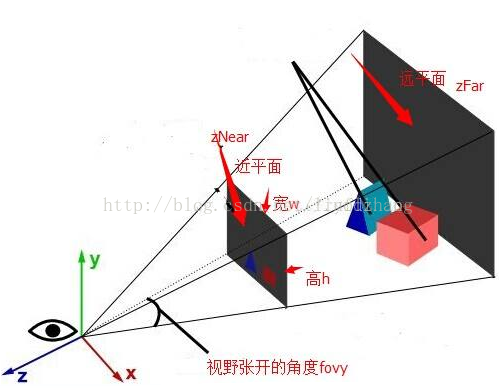
注:该图像来自于网上(不确定版权,如有侵权,还请告知!)
因此,整个成像的过程可以用公式描述为:
[u,v,1] = Matrix_Projection * Matrix_View * Matrix_World * [x,y,z]















 1929
1929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









