







小乌龟案例,需要依次启动3个终端,实现键盘控制小乌龟的运动。
launch文件可以
一次性启动
3个节点。
1. launch文件的特性
.launch后缀xml语言- 启动
.launch文件,会自动启动roscore - 同时启动多个节点,提高效率。
2. 编写launch文件
(1)创建.launch文件
vscode中,功能包hello右键,创建launch文件夹- 在
launch文件夹右键,创建start_turtle.launch文件
(2)编写start_turtle.launch文件
小技巧:如果担心书写的功能包名 & 节点文件名出错,可以在终端利用Tab键补全rosrun命令,ctrl + shift + c & ctrl + shift + v完成复制 & 粘贴。
<launch>
<!-- 启动多个节点 -->
<node pkg="turtlesim" type="turtlesim_node" name="tutle_GUI"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_key"/>
<node pkg="hello" type="helloc" name="output_text" output="screen"/>
</launch>
pkg:功能包名type:被运行的节点文件的名称(可执行文件的名字)。所以一般c++文件,可执行文件名字 = .cpp文件去掉后缀name:自己重命名节点(有时候节点文件名字,不宜与自己理解)output:指定输出目标。如果想在终端屏幕输出日志,必须要output = screen
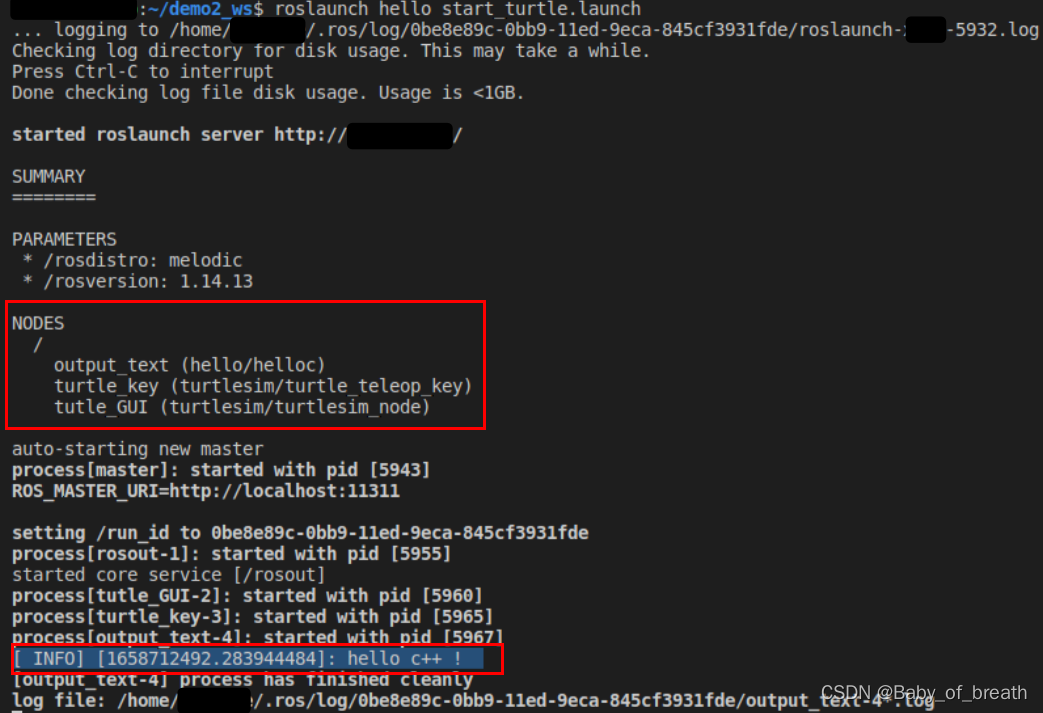
3. 运行start_turtle.launch文件
roslaunch hello start_turtle.launch
roslaunch 功能包名 .launch文件名- 鼠标
选中命令行后,可以通过键盘控制小乌龟运动















 964
964











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









