







 本文探讨全国大学生智能车竞赛中摄像头组处理斜入十字路口的挑战。作者分享了一种通过寻找拐点并拟合中线的方法来解决这一问题,建议使用广角镜头增加视野。该方案在实际应用中效果良好,适用于多种十字路口情况。
本文探讨全国大学生智能车竞赛中摄像头组处理斜入十字路口的挑战。作者分享了一种通过寻找拐点并拟合中线的方法来解决这一问题,建议使用广角镜头增加视野。该方案在实际应用中效果良好,适用于多种十字路口情况。
好久没有发文章了,也应小伙伴们的要求写这一篇十字处理方法,希望能够对大家有所帮助。
全国大学生智能车竞赛摄像头组中的难点其中之一我认为就是十字路况的一个处理方法,进入十字的情况多种多样,有从直道进入十字的情况这种情况是在十字中最容易处理的情况,通常直接向上搜索边界就可以得到很好的结果,最难处理的情况是斜入十字的情况,这个情况不知道困扰过多少人,至少我是被这个问题困扰了两届比赛,最后经过观察图像和研究最终还是找到了一个比较好的解决方案。
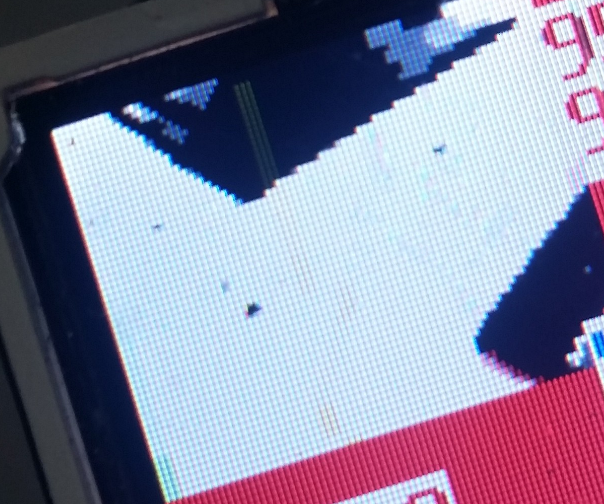
就比如这种情况,正常应该是往左走但是我们要怎么去识别出来这种情况呢?
我的解决方案分为以下几个部分:
1. 首先左边右边进行搜索从下至上依次搜索一遍,这时候会得到一个边界,但是得到的边界肯定是不准确的,不能通过它直接求取中线然后计算偏差,否则实际效果会让你觉得很迷。
正常搜索会出问题的区域
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5859
5859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









