






作者 | 王汝嘉 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/601700023
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【硬件交流】技术交流群
后台回复【相机标定】获取超详细的单目双目相机模型介绍、内外参标定算法原理视频!
论文:https://arxiv.org/pdf/2301.07279.pdf
代码:https://github.com/OpenCalib/SensorX2car

1论文思路
自动驾驶系统中传感器的性能从根本上受到传感器标定质量的限制。传感器必须相对于车体框架定位良好,才能提供有意义的定位和环境感知。然而,虽然目前已有许多在线标定传感器间 外参数的方法,但传感器与车辆坐标系之间的标定研究较少。为此,本文提出了一个标定工具箱SensorX2car,用于道路场景中传感器到汽车坐标系的在线标定。它包含四个常用的传感器:IMU(惯性测量单元)、GNSS(全球导航卫星系统)、LIDAR(光探测和测距)、摄像机和毫米波雷达。对每个传感器分别设计了一种方法,主要是标定传感器对车身的转动。真实世界和模拟实验证明了提出的方法的准确性和泛化能力。同时,相关的代码已经开源,以造福社区。据本文所知,SensorX2car是第一个OpenSource传感器到汽车标定工具箱。
2主要贡献
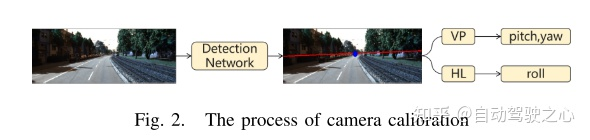
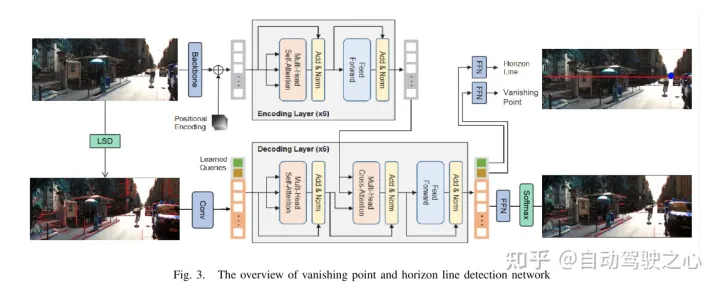
提出了一种利用道路几何特征的摄像机对车标定方法,该方法可以用单幅图像进行实时标定。
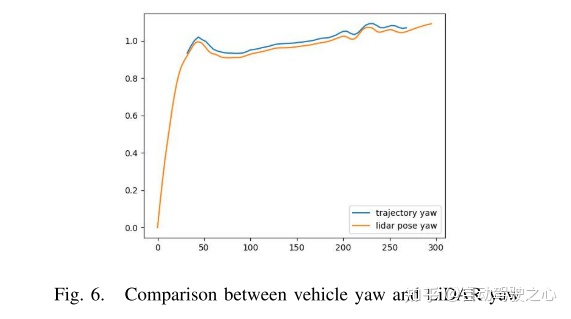
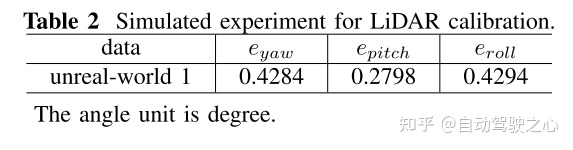
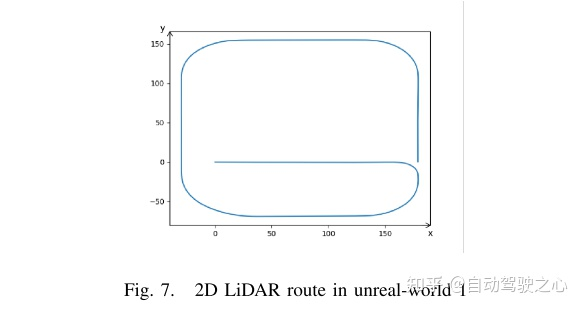
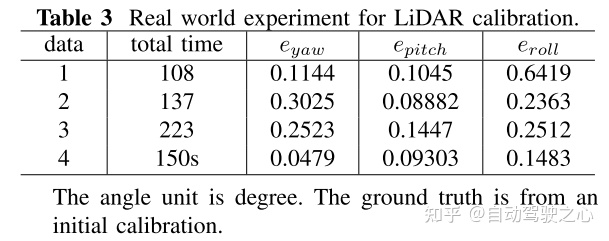
本文提出了一种激光雷达对汽车的在线标定方法,该方法可以用于任意的驾驶程序,并且可以实时运行。该方法能准确地估计旋转和Z轴位移。
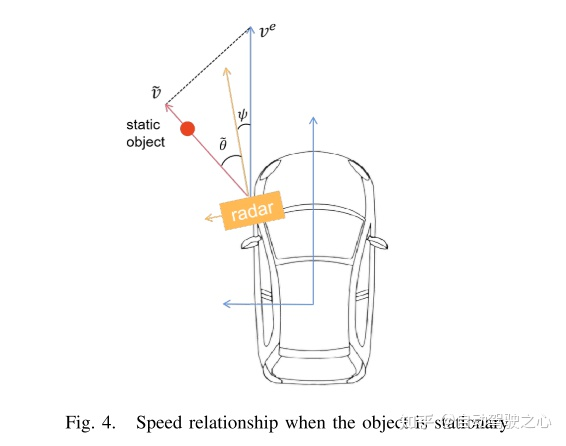
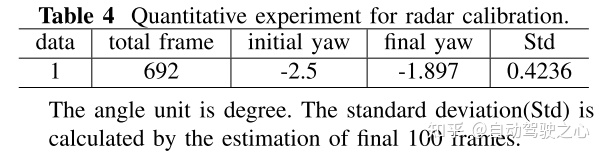
本文介绍了一种通过选择最有可能出现在车辆正前方的静止目标进行毫米波雷达在线标定的方法,以及一种基于道路场景中静止物体的最小二乘优化拟合余弦函数的标定细化方法。
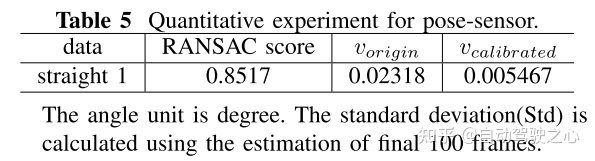
提出了一种在道路场景下从姿态传感器到汽车的在线标定方法,该方法可以在直线行驶和非直线行驶条件下实现。
提出的校正方法在模拟和真实数据集上都显示出良好的性能;同时,相关的代码已经开源,以造福社区。
3论文设计
目前有一些与传感器标定相关的开源项目,但大多数是在两个或多个传感器之间进行标定。传感器到汽车标定的方法还很少。因此,在前人OpenCalib[1]标定研究和项目经验的基础上,本文提出的了一种基于道路场景的多传感器在线标定方法SensorX2car。本文在GitHub上有开源的相关代码来造福社区。

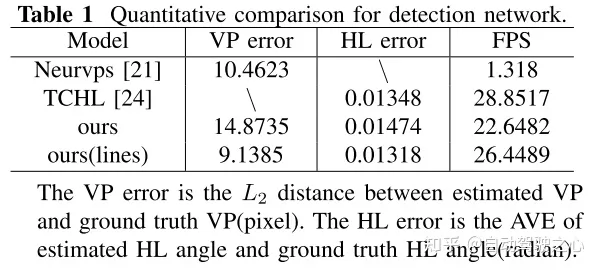
4实验结果














 175
175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









