






点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
编辑 | 自动驾驶之心
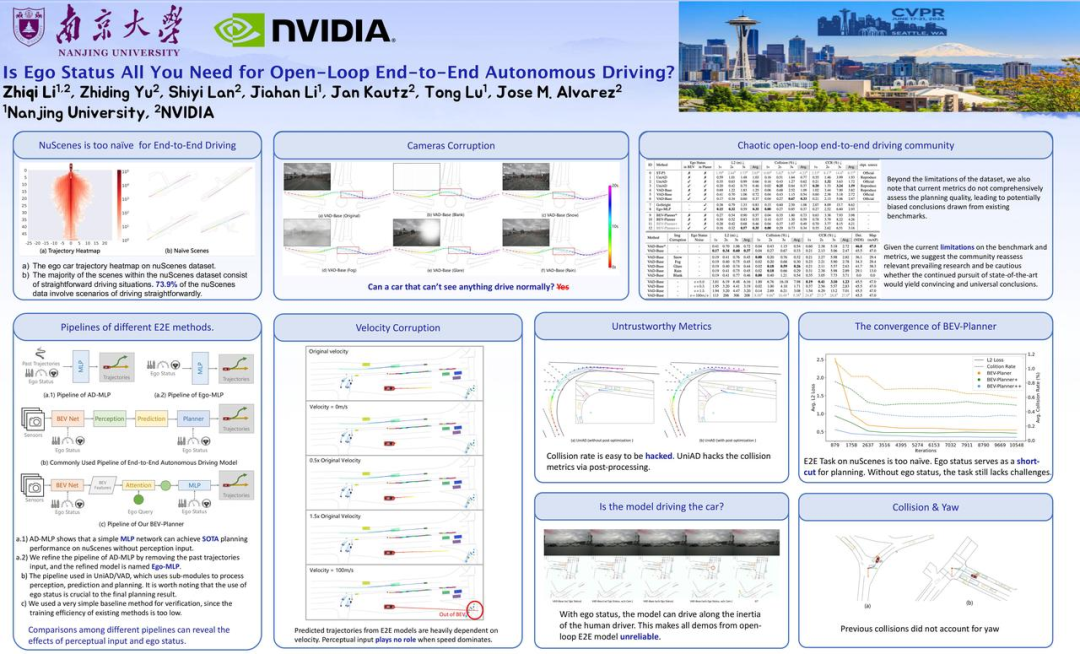
Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving?
Thu 20 Jun 5 p.m
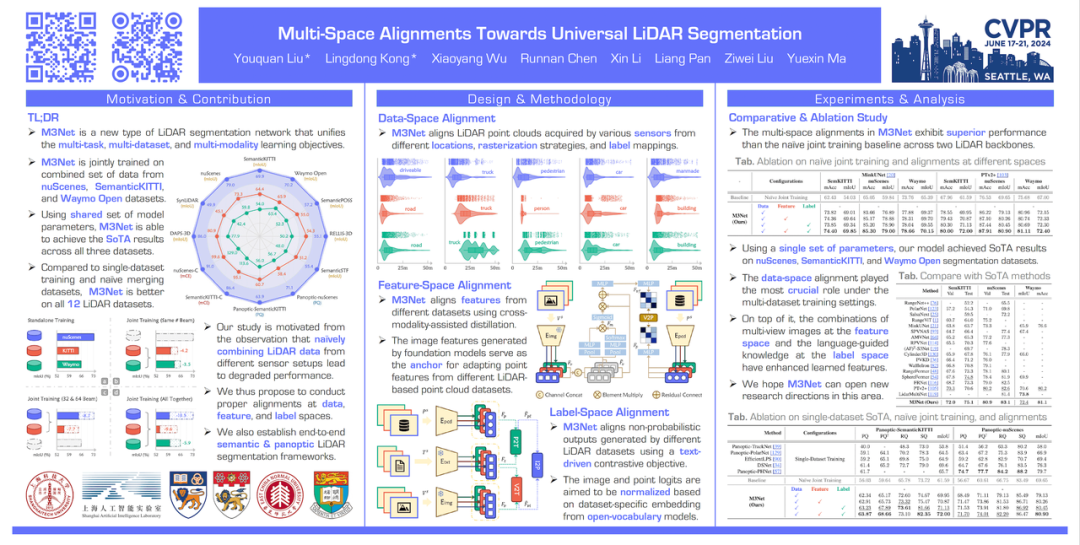
Multi-Space Alignments Towards Universal LiDAR Segmentation
Thu 20 Jun 5 p.m.
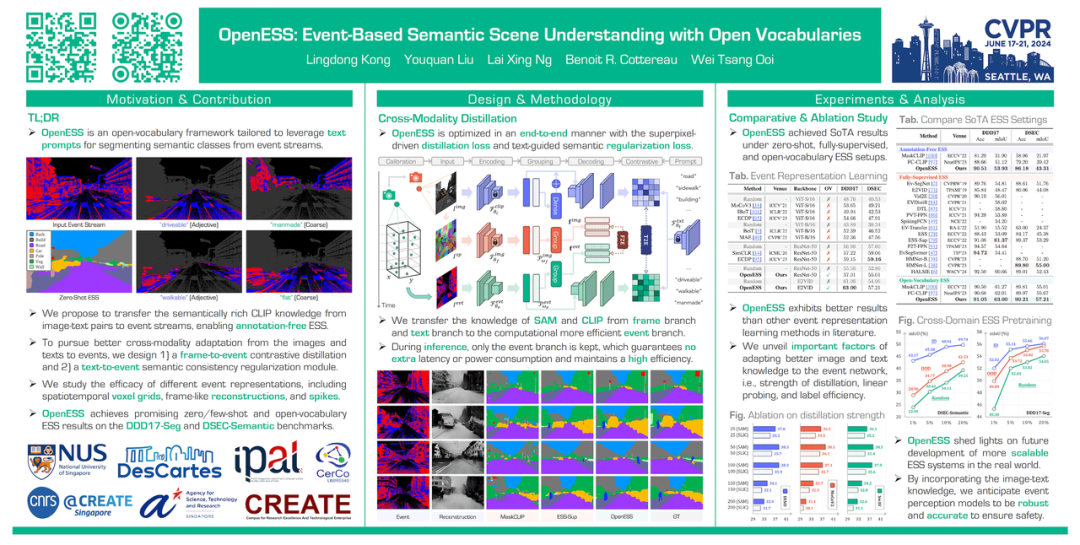
OpenESS: Event-based Semantic Scene Understanding with Open Vocabularies CVPR 2024
Thu 20 Jun 5 p.m.
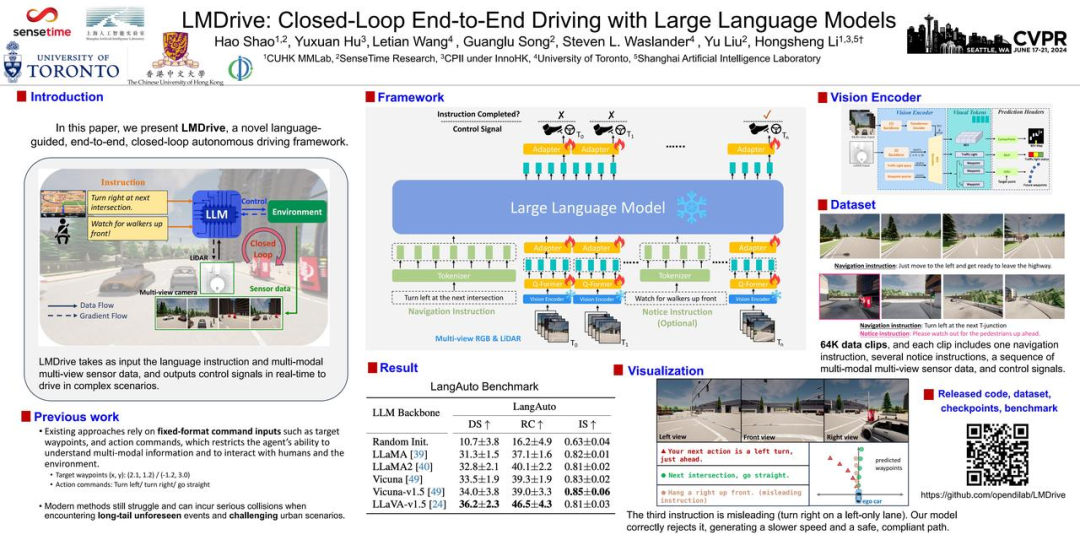
LMDrive: Closed-Loop End-to-End Driving with Large Language Models
Thu 20 Jun 5 p.m.
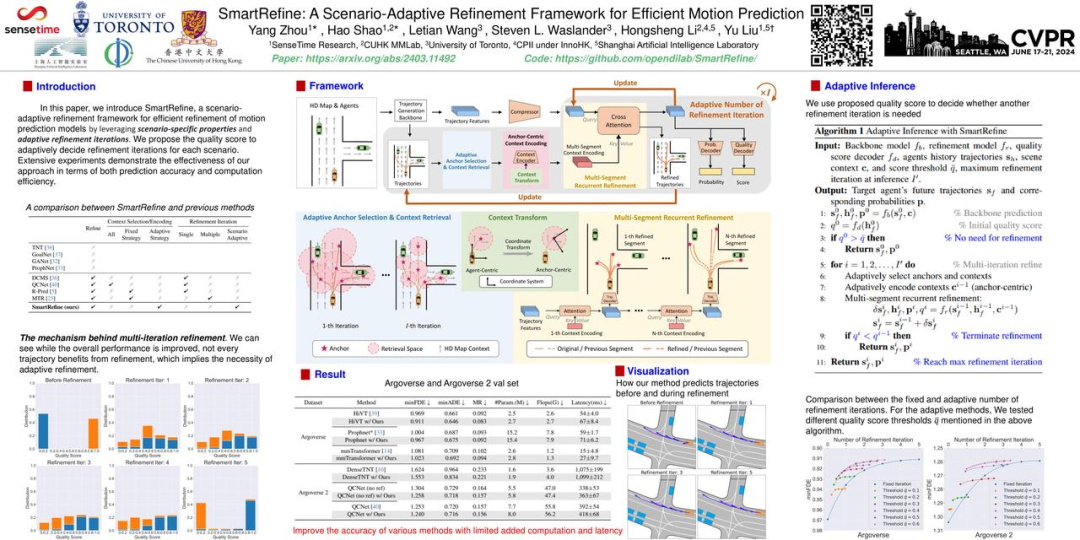
SmartRefine: A Scenario-Adaptive Refinement Framework for Efficient Motion Predictior
Thu 20 Jun 5 p.m.
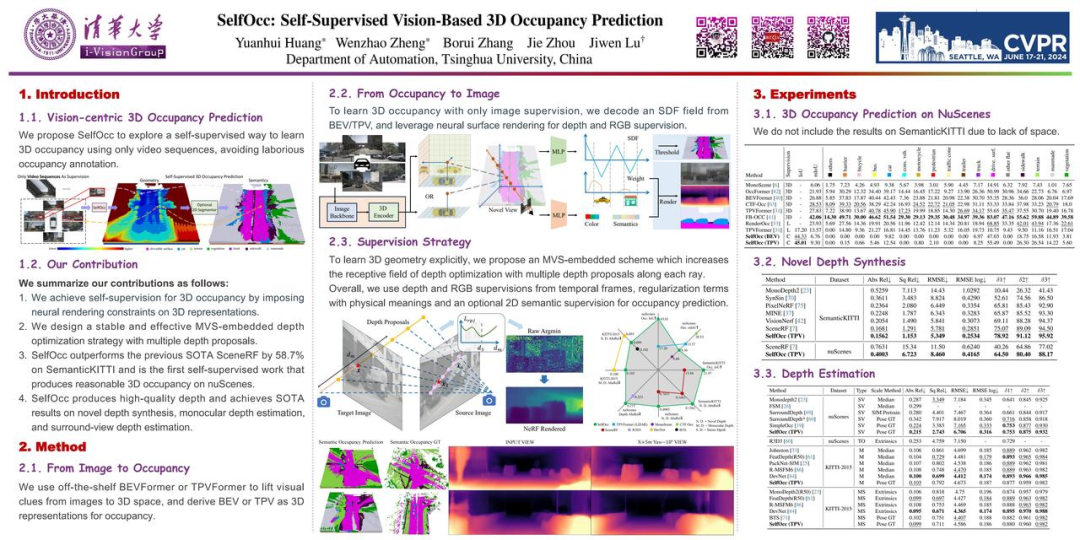
SelfOcc: Self-Supervised Vision-Based 3D Occupancy Prediction
Sat 22 Jun 13:30-15:00
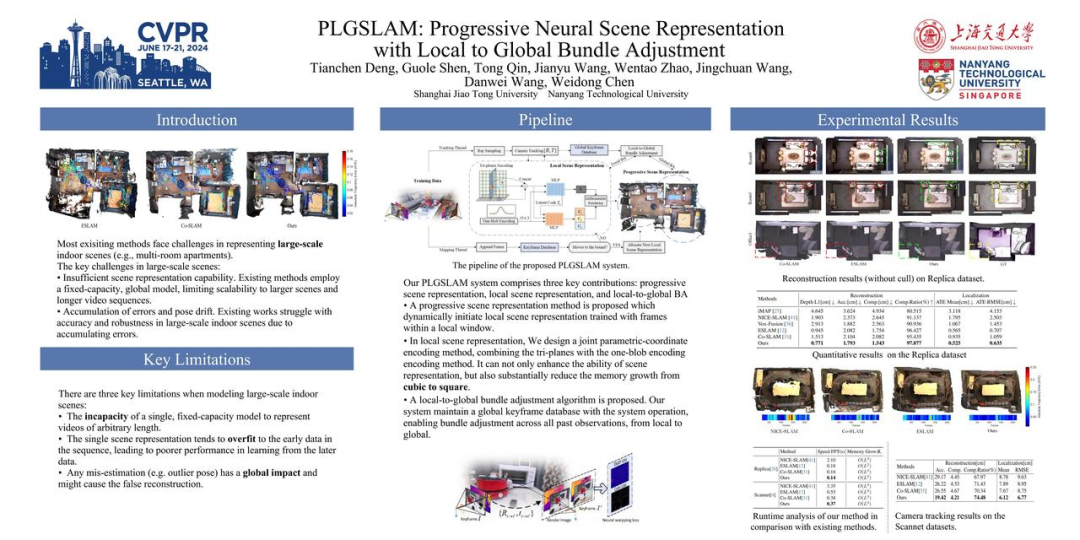
PLGSLAM: Progressive Neural Scene Representation with Local to Global Bundle Adjustment
Fri 21 Jun 10:30 a.m
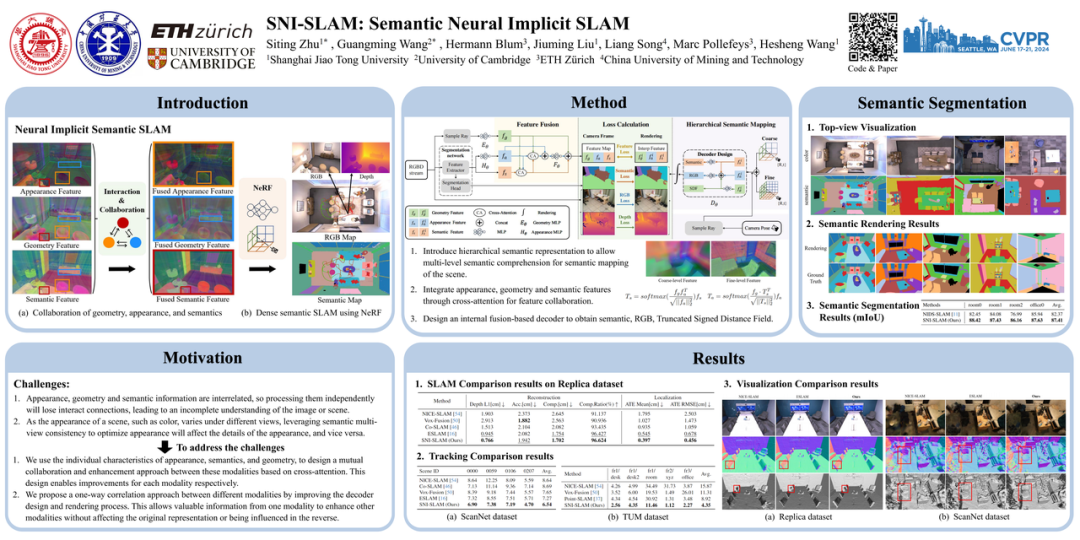
SNI-SLAM: Semantic Neural Implicit SLAM
Fri 21 Jun 10:30 a.m.
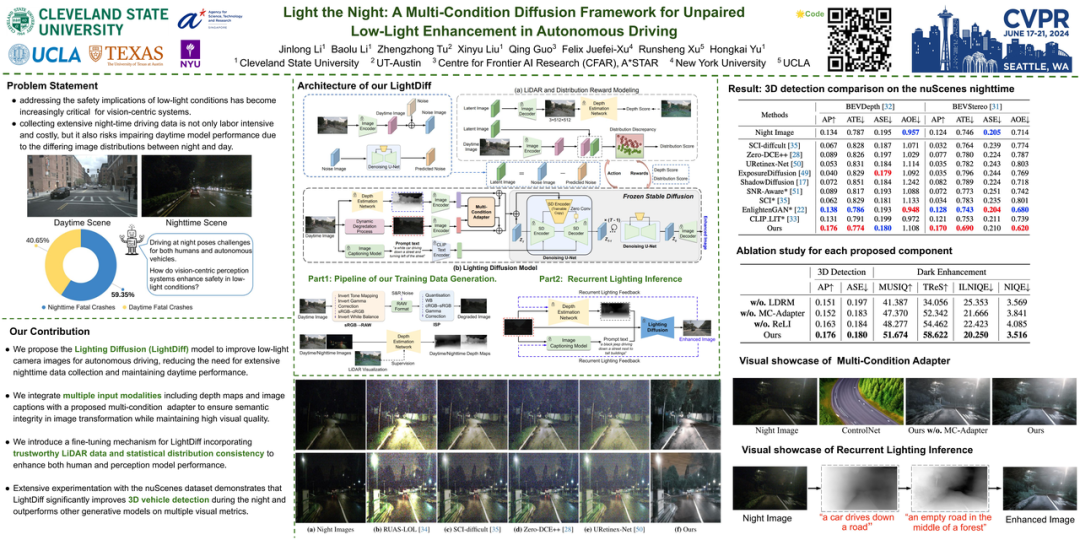
Light the Night: A Multi-Condition Diffusion Framework for Unpaired Low-Light Enhancement in Autonomous Driving
Thu 20 Jun 5 p.m.
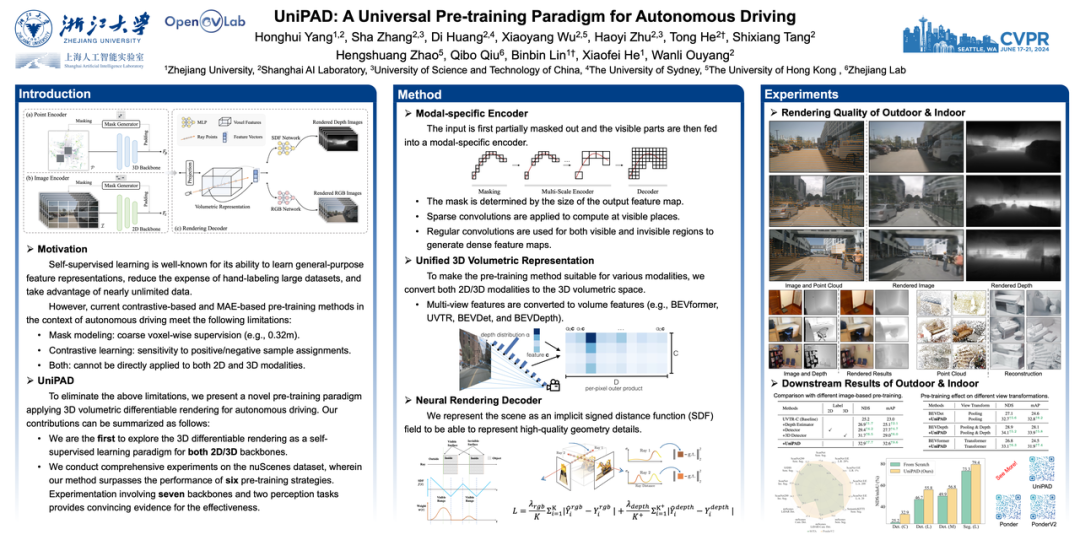
UniPAD: A Universal Pre-training Paradigm for Autonomous Driving
Thu 20 Jun 5 p.m.
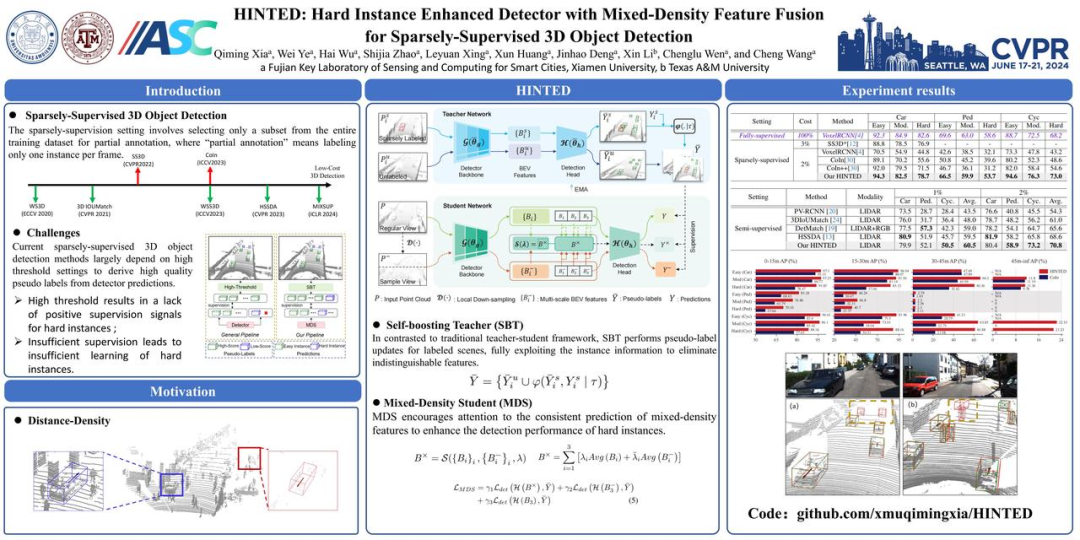
HINTED: Hard Instance Enhanced Detector with Mixed-Density Feature Fusion for Sparsely-Supervised 3D Object Detection
Thu 20 Jun 5 p.m.
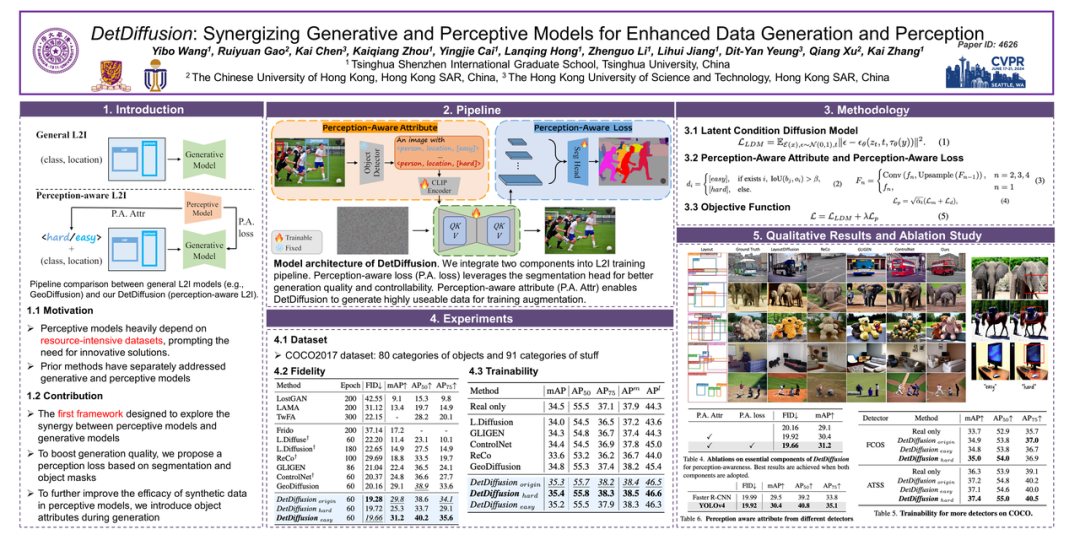
DetDiffusion: Synergizing Generative and Perceptive Models for Enhanced Data Generation and Perception
Wed 19 Jun 5 p.m.
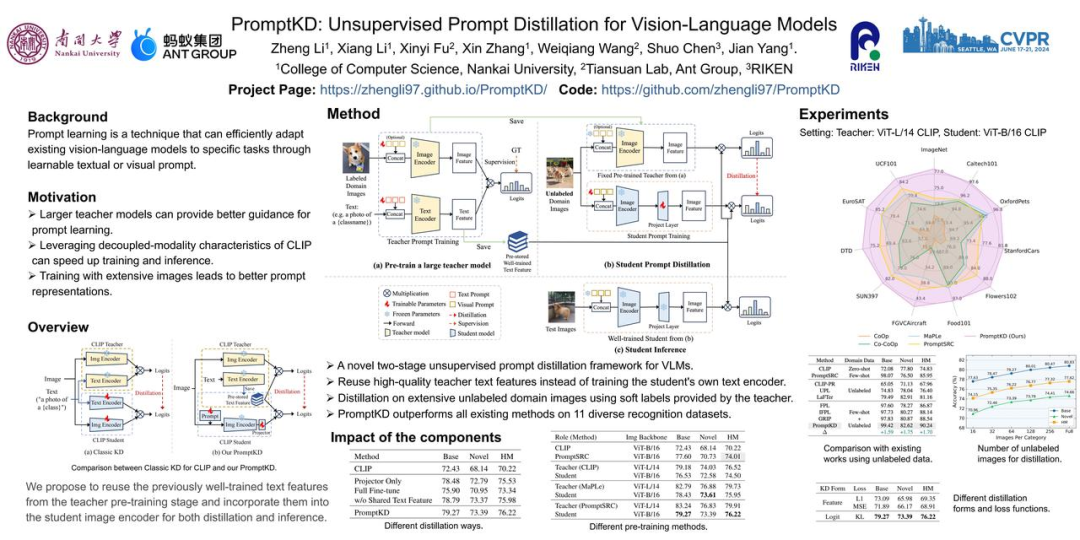
PromptKD: Unsupervised Prompt Distillation for Vision-Language Models
Fri 21 Jun 5 p.m.
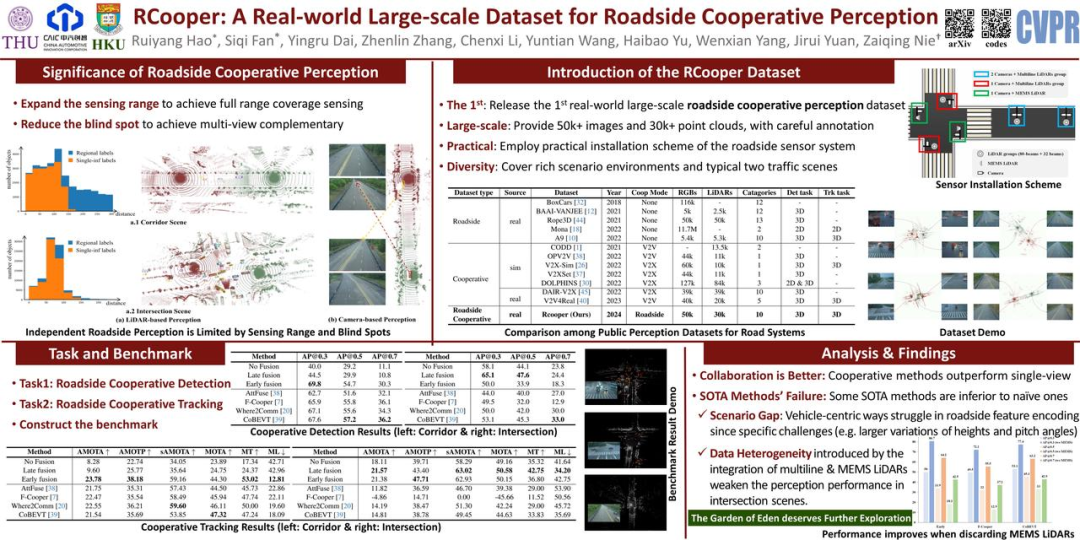
RCooper: A Real-world Large-scale Dataset for Roadside Cooperative Perception
Fri 21 Jun 10:30 a.m.
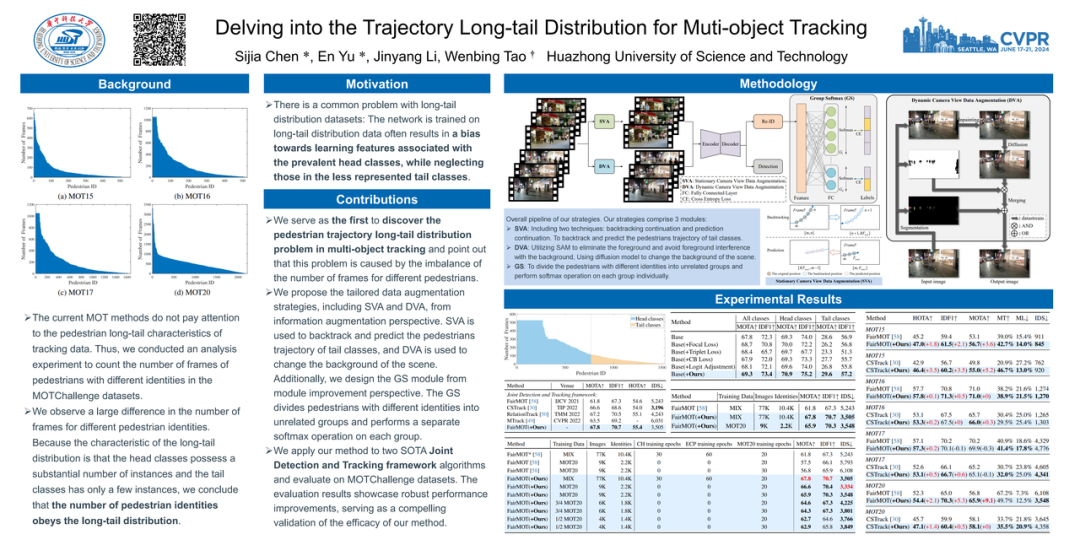
Delving into the Trajectory Long-tail Distribution for Muti-object Tracking
Thu 20 Jun 5 p.m.
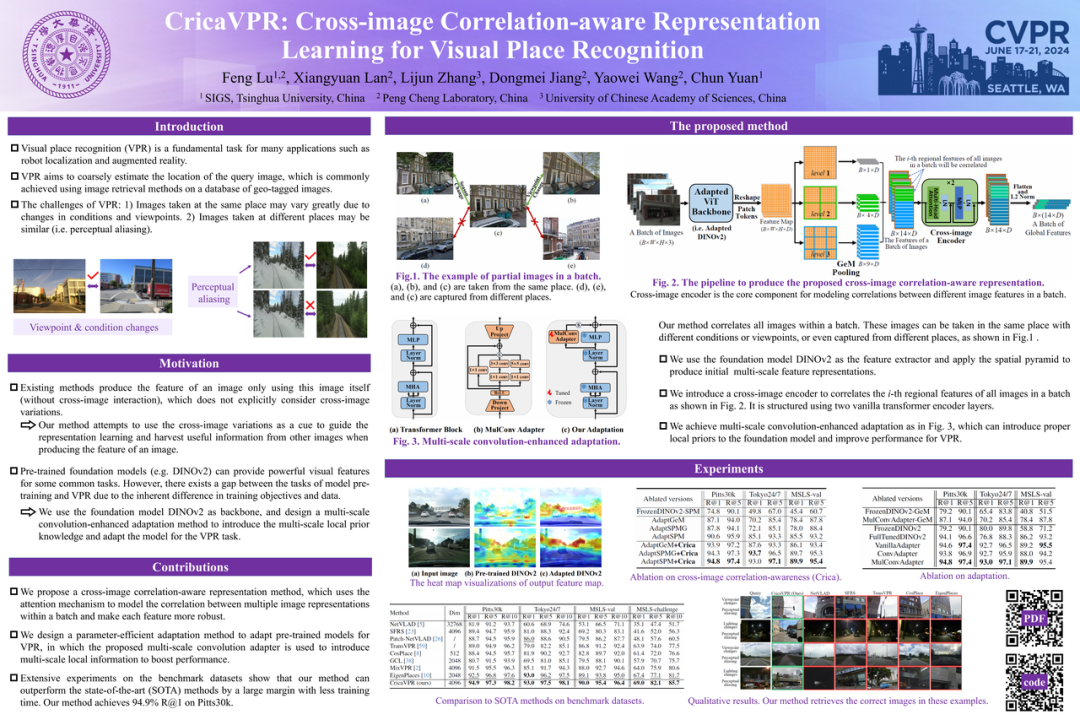
CricaVPR: Cross-image Correlation-aware Representation Learning for Visual Place Recognition
Thu 20 Jun 5 p.m.
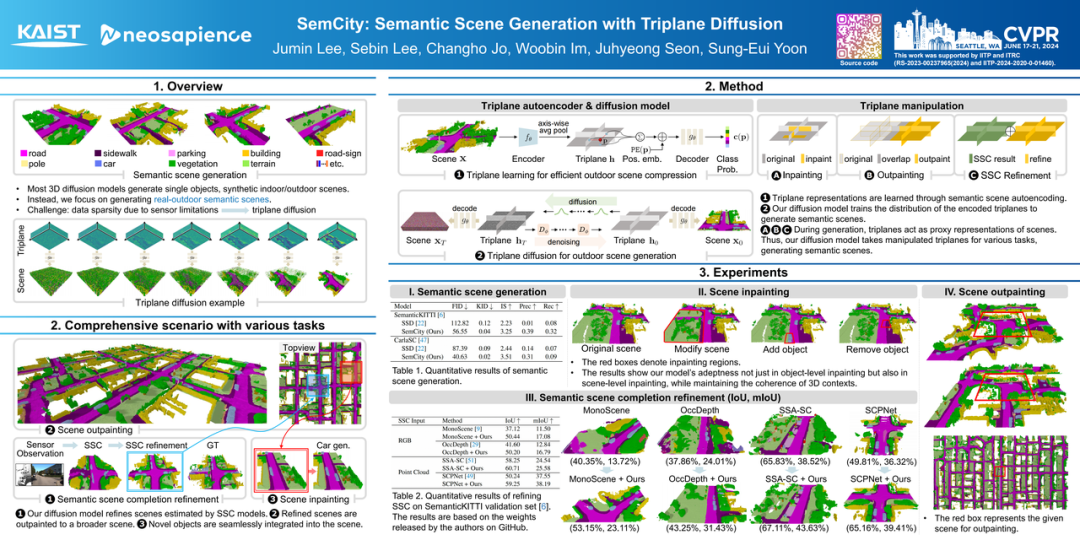
SemCity: Semantic Scene Generation with Triplane Diffusion
Fri 21 Jun 5 p.m.
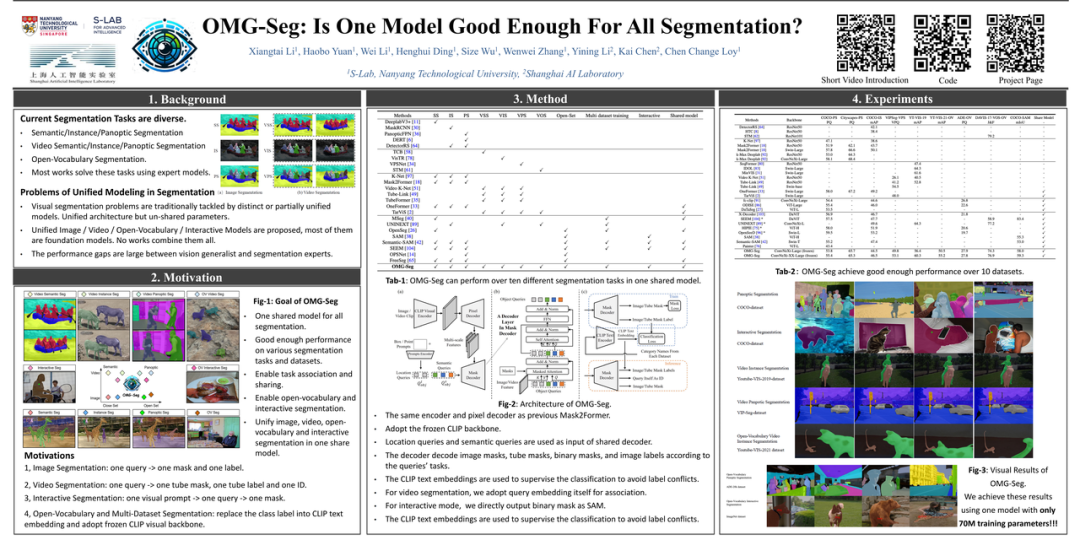
OMG-Seg: Is One Model Good Enough For All Segmentation?
Fri 21 Jun 5 p.m.
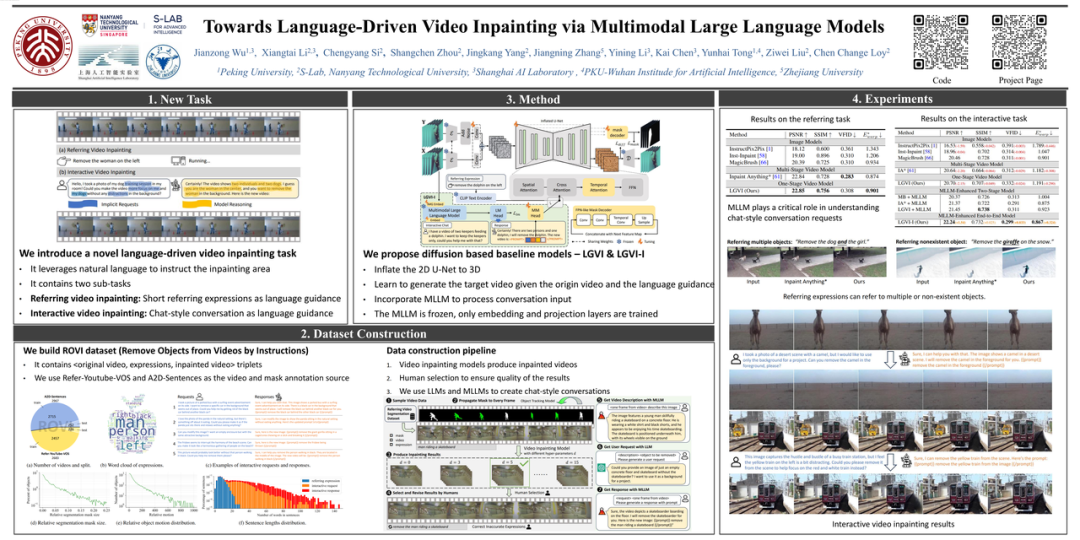
Towards Language-Driven Video Inpainting via Multimodal Large Language Models
Thu 20 Jun 10:30 a.m.
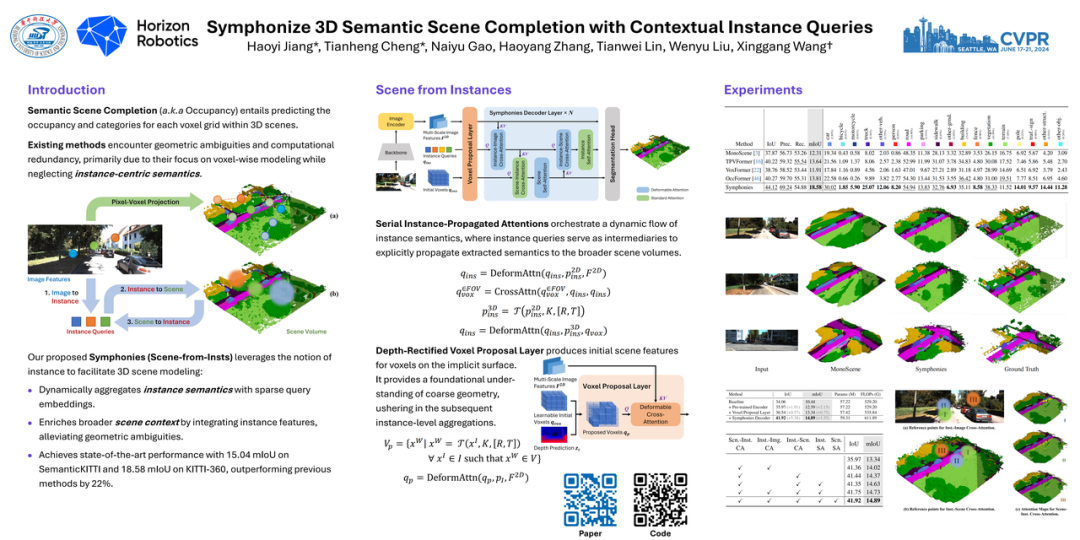
Symphonize 3D Semantic Scene Completion with Contextual Instance Queries
Fri 21 Jun 10:30 a.m.
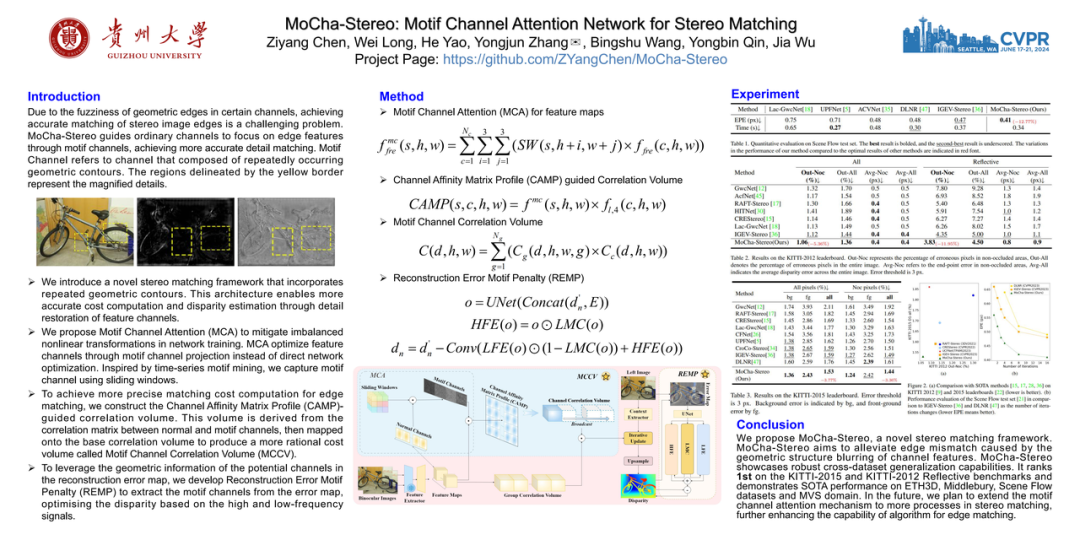
MoCha-Stereo: Motif Channel Attention Network for Stereo Matching
Fri 21 Jun 5 p.m.
Selective-Stereo: Adaptive Frequency Information Selection for Stereo Matching
Fri 21 Jun 10:30 a.m.

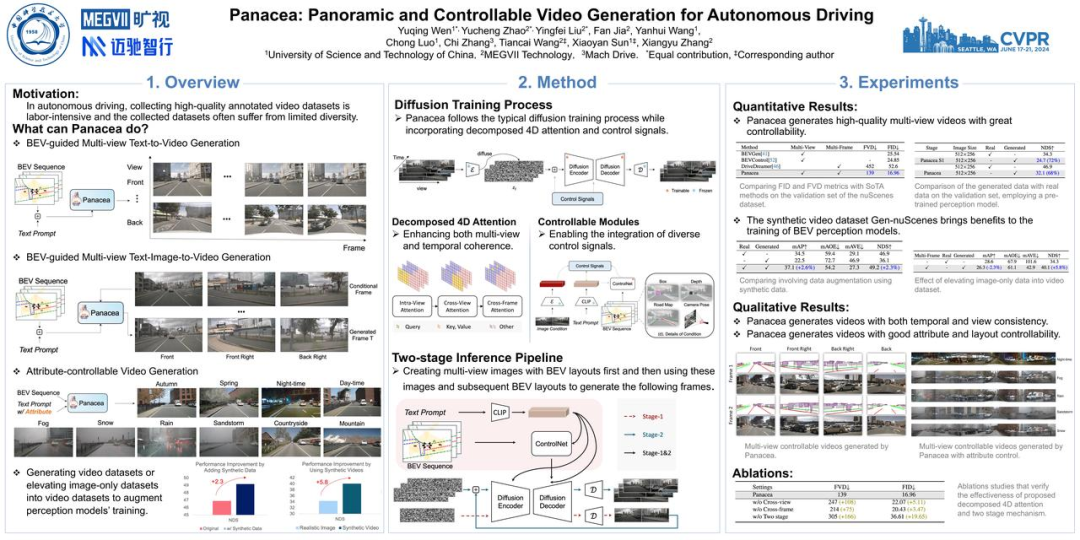
Panacea: Panoramic and Controllable Video Generation for Autonomous Driving
Wed 19 Jun 5 p.m.
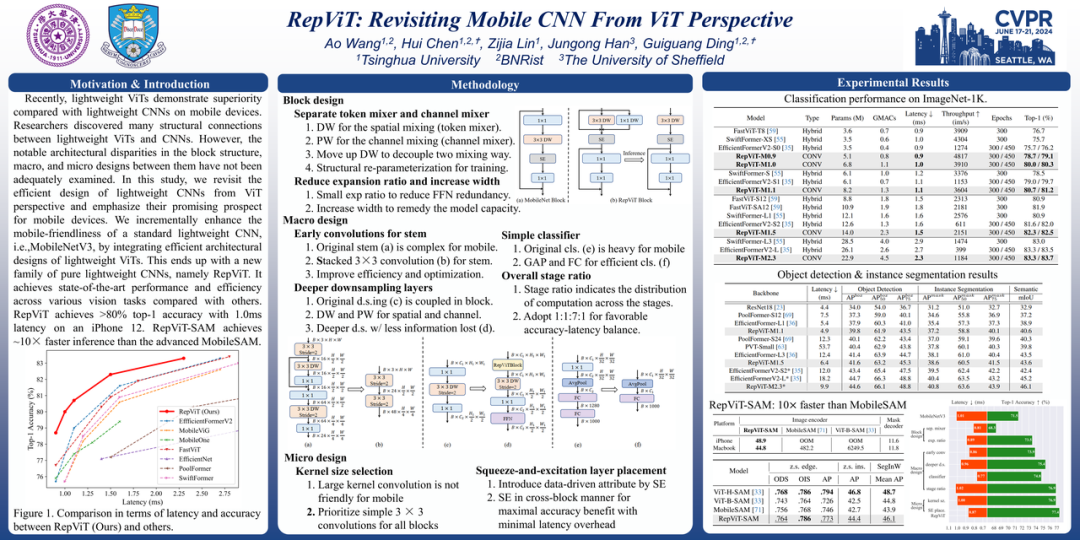
RepViT: Revisiting Mobile CNN From ViT Perspective
Thu 20 Jun 5 p.m.
SAFDNet: A Simple and Effective Network for Fully Sparse 3D Object Detection
Thu 20 Jun 1 p.m. PDT — 2:30 p.m. PDT

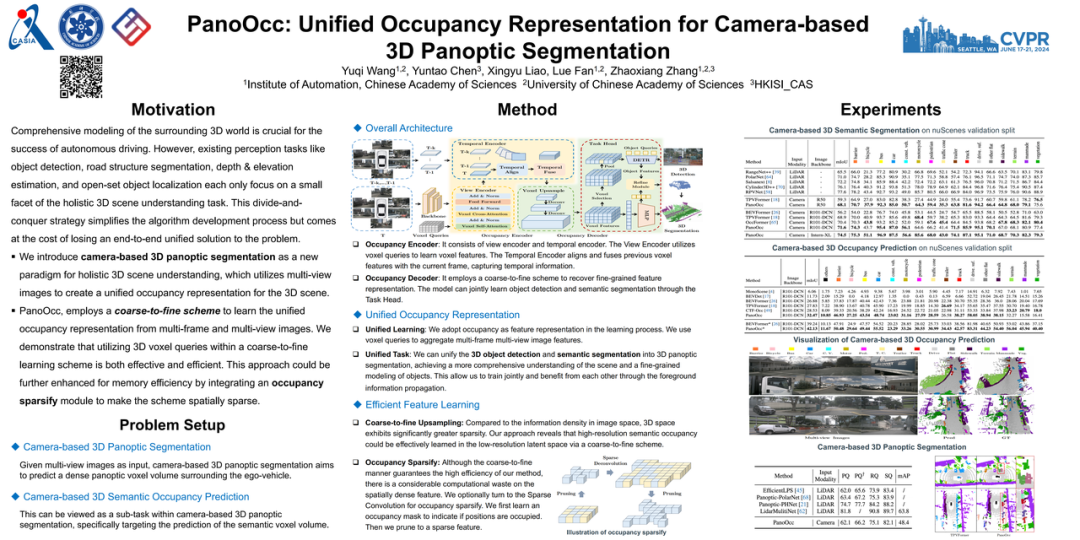
PanoOcc: Unified Occupancy Representation for Camera-based 3D Panoptic Seamentation
Thu 20 Jun 5 p.m.
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 网页端官网:www.zdjszx.com
网页端官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
国内最大最专业,近3000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵


















 1259
1259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









