






>>直播和内容获取转到→自动驾驶之心知识星球
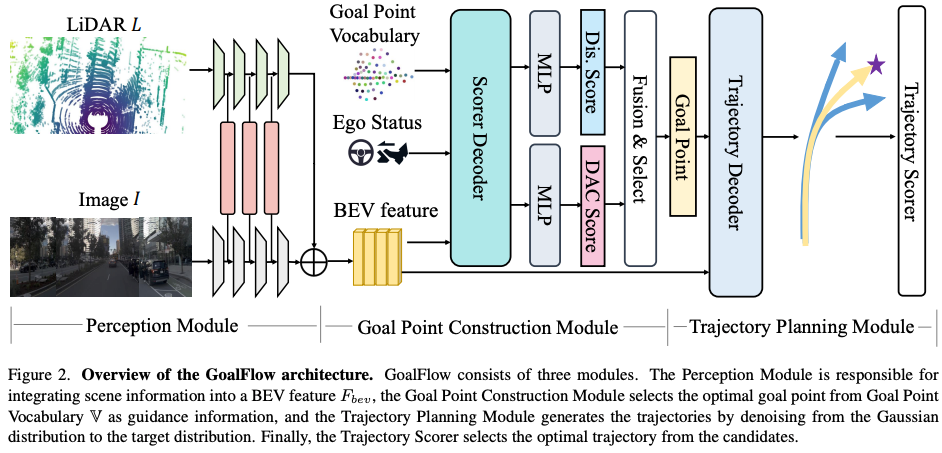
在自动驾驶场景中,很少有一个合适的轨迹满足所有场景。最近的方法越来越关注多模态轨迹分布的建模。然而由于高轨迹发散以及制导和场景信息之间的不一致,它们受到轨迹选择复杂性和轨迹质量降低的影响。为了解决这些问题,中科院&地平线等团队最提出了GoalFlow,用于生成高质量的多模式轨迹,这是一种有效约束生成过程以生成高质量、多模态轨迹的新方法。为了解决基于扩散的方法中固有的轨迹发散问题,GoalFlow通过引入目标点来约束生成的轨迹。GoalFlow建立了一种新的评分机制,根据场景信息从候选点中选择最合适的目标点。此外采用了一种高效的生成方法——流匹配来生成多模态轨迹,并结合了一种精细的评分机制来从候选者中选择最佳轨迹。GoalFlow在Navsim上得到了验证,并取得SOTA结果(90.3的PDMS),大大超过了其他方法,为自动驾驶提供了稳健的多模式轨迹。与其他基于扩散策略的方法相比,GoalFlow只需要一个去噪步骤就可以获得优异的性能。
论文链接:https://arxiv.org/abs/2503.05689
代码链接:https://github.com/YvanYin/GoalFlow
为此自动驾驶之心中科院自动化研究所在读硕士—邢泽斌,为大家分享这篇端到端自动驾驶多模轨迹的最新工作。今晚七点半锁定自动驾驶之心直播间~

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到300+自动驾驶公司与科研机构的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案,更有行业动态和岗位发布!欢迎扫描加入

【自动驾驶之心】技术交流群
自动驾驶之心是国内领先的技术交流平台,关注自动驾驶前沿技术与行业、职场成长等。我们成立了一系列的技术交流群,涉及:端到端自动驾驶、大模型、车道线检测、2D/3D目标跟踪、2D/3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、点云处理、在线地图、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、Gaussian Splatting、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等多个方向!
备注:学校/公司+方向+昵称(快速入群方式)

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取

















 548
548

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









