







-
概述
-
1.1目的
本文档描述的产品是车身控制器,汇总了产品的电气功能需求、产品性能需要、以及相关的法律法规要求。产品开发将依据本文档进行。
-
-
缩写
-
| BCM | Body Control Module |
| EEPROM | Non-Volatile Memory For Storing Coding And Balancing Data |
| ACC | Auxiliary (Ignition Pos 1) |
| IG1 | Ignition1 (Ignition Pos 2) |
| IG2 | Ignition2 (Ignition Pos 3) |
| KL.31 | Battery Negative |
| KL.30 | Battery Positive |
注: KL.30是功率信号,ACC, IG1, IG2是非功率信号。
参考文件
| 1 | XXXX |
| 2 | XXXX |
-
- 功能概述
| 序号 | 功能名称 | 功能简述 |
| 1 | 外部灯光 | 左右转向灯,危险报警灯控制 |
| 近光灯、带我回家功能控制 | ||
| 远光灯控制 | ||
| 位置灯控制(分别控制保杠,尾门,前位置灯) | ||
| 白昼灯控制 | ||
| 前雾灯控制 | ||
| 后雾灯控制 | ||
| 刹车灯控制 | ||
| 2 | 内部灯光 | 内顶灯控制 |
| 钥匙孔照明灯控制 | ||
| 踏步灯功能控制 | ||
| 3 | 雨刮洗涤系统 | 前雨刮控制 |
| 4 | 锁系统 | RKE遥控解闭锁 |
| 拔出钥匙自动解锁 | ||
| 车速自动闭锁 | ||
| 碰撞解锁 | ||
| 5 | RKE功能 | 遥控解闭锁 |
| 6 | 防盗报警系统 | 防盗报警功能 |
| 7 | 辅助功能 | 除霜功能 |
| 电动车窗使能功能 | ||
| 点火开关状态采集 | ||
| 手刹开关信号采集 |
-
-
- 功能参数的配置
-
| 功能配置名称 | 配置信号名称 | 配置的默认值 | |
| 车速自动闭锁门配置 | Config.Lock.AutolockSpeedCfg | 0x1, 40km/h | |
| 带我回家功能时间配置 | Config.FollowMeHomeTimeCfg | 0x1,30s | |
| 锁热保护时间配置 | Config.LockThermalDelayCfg | 0x1,15s |
-
-
- 电压处理策略-过压和欠压的处理
-
BCM的正常工作电压是9V-16V,按照平台制定的电压管理策略执行,分为五种状态:
| 正常 | 9-16V | 允许输出 |
| 高压 | 短暂的高于16V,大于40ms,但是440ms内又回到正常。 | |
| 低压 | 短暂的低于9V,大于40ms,但是80ms内又回到正常。 | |
| 过压 | 长久的高于16V, 大于440ms,没有回到正常。 | 关闭输出,系统电压恢复正常后输出恢复 |
| 欠压 | 长久的低于9V,大于80ms,没有回到正常。 |
CAN 网络工作电压范围7-17.5V,LIN 网络工作电压范围7-18V,DTC工作电压为8-16V
-
-
- 工作温度及休眠电流
-
工作温度为-40~+80℃,存储温度-40 to 85°C,休眠电流小于3mA(@12.8V),按照XX平台的测试方式,定时精度+/-10%。
-
-
- 休眠及唤醒策略
-
进入休眠状态的三个前提条件为:
-
- 功能满足休眠条件
- CAN 网络满足休眠条件
- LIN 满足休眠条件
其中功能满足休眠条件为:
- 钥匙拔出。
- 内外部灯光没有输出,前雨刮没输出,门锁没有输出请求,防盗报警未被触发,后除霜未被开启,电动车窗未被使能,蜂鸣器没有输出,持续60秒钟没有变化。
- BCM未处于诊断模式
BCM进入休眠状态前,关闭所有输出信号。进入休眠状态后,以下输入信号均可将BCM从休眠中唤醒。
- 开关量:钥匙插入信号,危险警告灯开关、大灯、位置灯开关信号、三门+引擎盖门状态开关、驾驶员门锁状态、刹车灯开关、中控解闭锁
- 点火状态:IG2、IGI、ACC
- CAN网络(包括PEPS信号):CAN中断唤醒
- RKE:有遥控命令
- 诊断:进入诊断模式
- LIN唤醒:BCM唤醒后LIN唤醒。
-
-
- 总线和诊断
-
BCM提供CAN线方式的诊断以方便BCM的维修。诊断部分需要实现以下的功能:
- 参数配置(EEPROM读写)
- 读DTC及清除DTC
- IO Control
- BCM控制器信息
- 下线匹配功能
- ECU复位
支持一路CAN总线作为网络上面的终端节点m,一路LIN总线作为网络主节点。
-
-
- 短路开路保护策略
-
对于高边输出:
在On-stage时进行开路短路检测,一旦发现短路或者开路即有计数器计数,达到一定的数值即可以判断为真正的开路或者短路,并置相应的DTC。在Off-stage时进行短路到电源检测,一旦发现短路到电源即有计数器计数,达到一定的数值即可以判断为真正的短路到电源,并置相应的DTC。
对于SPI低边输出:
我们只需要通过读取其寄存器的诊断位信息来判断,在Off-stage时, 若诊断位为低, 则判断输出为开路, 同时有计数器计数,达到一定的数值即可以判断为真正的开路,并置相应的DTC. 在On-stage时, 若诊断位为高, 则判断输出为短路到电源, 同时有计数器计数,达到一定的数值即可以判断为真正的短路到电源,并置相应的DTC。
-
-
- RKE功能
-
对于JAC M516车型,BCM提供RKE功能。
BCM模块本身包含RKE模块,使用的无线频率是433.92MHz±100kHz,RKE共2个按键,包括三门解锁功能,三门上锁功能,以及尾门解锁功能。
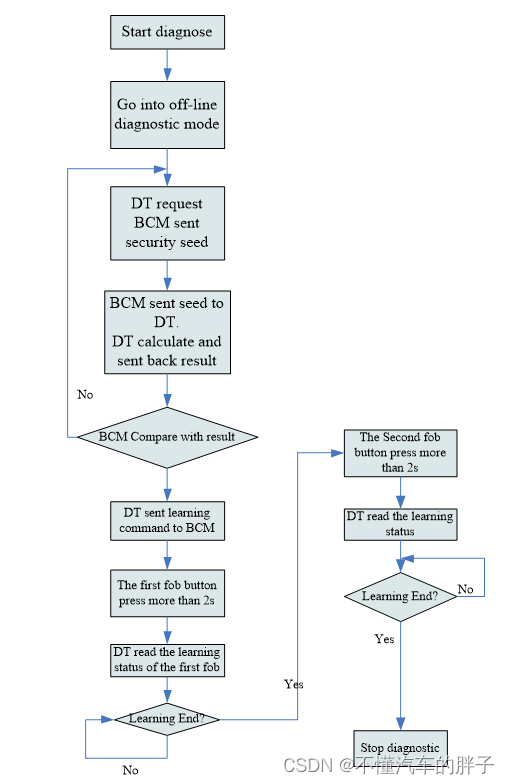
RKE通过诊断的方式进行匹配,具体配钥匙的如图1所示。当等待第一把钥匙学习的时候,右侧转向灯常亮,等待第二把钥匙学习的时候,左侧转向灯常亮,学习成功,两侧转向灯灭。通过诊断结束命令或者定时时间到,退出学习状态,RKE匹配结束。
备注:
- 一次Routine可学习两把钥匙。
- Routine时间如果大于2分钟,BCM退出此次Routine,已学习成功的钥匙将记入EEPROM。
- 最先成功学习完成的钥匙记录为第一把。
- 学习时需要同时按住开锁和闭锁按键。
- 退出条件有两种:一是2分钟时间到,二是诊断结束命令。
遥控距离保证20米,先按照没有外部天线的方式开发,实车测试达不到要求的距离需要增加外部天线。
M516安全气囊展开信号为硬线PWM信号,信号周期240ms,ACU在ON档之后发送硬线信号。
当未发生碰撞(正常模式)时:200ms±10%高电平,40ms±10%低电平;当发生碰撞输出反向PWM信号:200ms±10%低电平,40ms±10%高电平,总共20±10%个有效高电平脉冲,之后恢复正常模式脉冲。
ACU的PWM碰撞反向信号输出为异步触发,即不考虑在碰撞之前是高或者低电平,都在碰撞发生的时刻先起始输出一个持续200ms低电平,具体描述如图2所述:
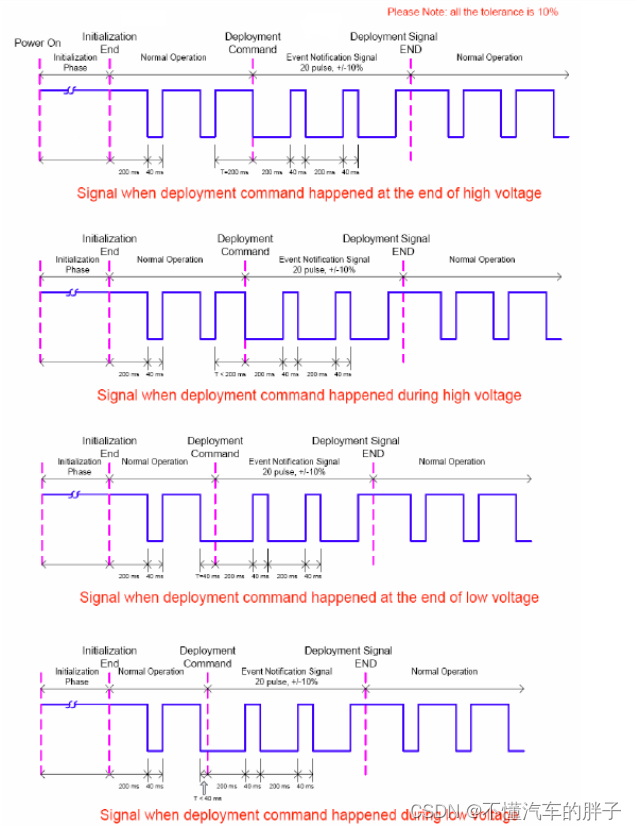
图2 碰撞信号详细图解
外部灯光组合开关接线如图3所示:
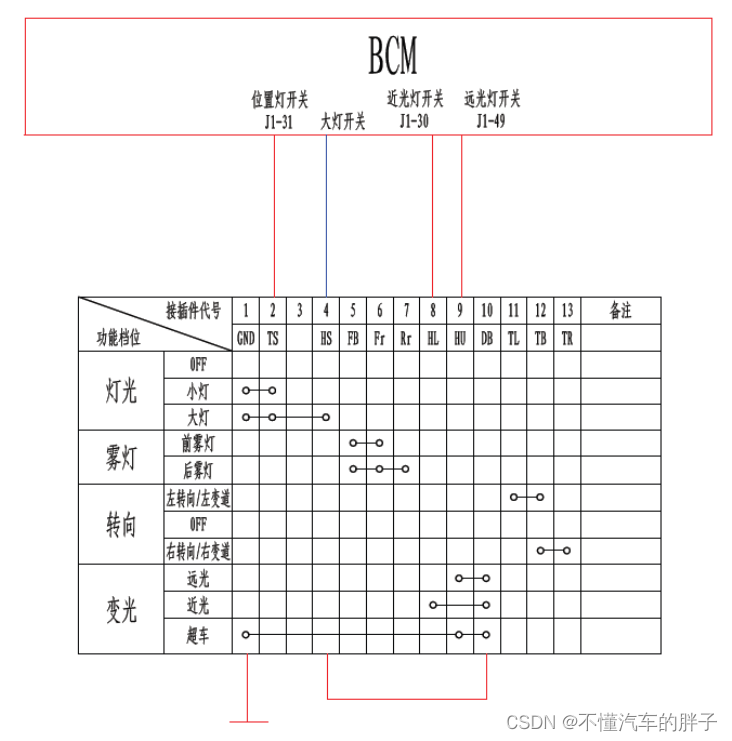
图3 外部灯光组合开关接线图
-
-
- 转向灯和危险报警灯
-
转向灯主要由左转向灯、右转向灯、左转向指示灯、右转向指示灯组成。转向灯在工作时以每分钟85±10次的频率闪烁。点亮和熄灭的时间相同。左转向指示灯和右转向指示灯通过CAN网络发送给仪表。
转向灯和危险报警灯输入信号见表1:
| 序号 | 描述 | 输入/输出 | 类型 | 有效值(接通时) | 湿电流 |
| 1 | ACC | 输入 | 自锁开关 | KL30 | 10mA |
| 2 | IG1 | 输入 | 自锁开关 | KL30 | 10mA |
| 3 | IG2 | 输入 | 自锁开关 | KL30 | 10mA |
| 4 | 左转向灯开关 | 输入 | 自锁开关 | KL31 | 10mA |
| 5 | 右转向灯开关 | 输入 | 自锁开关 | KL31 | 10mA |
| 6 | 危险报警灯开关 | 输入 | 自锁开关 | KL31 | 10mA |
| 7 | 碰撞信号 | 输入 | 脉冲信号 | ||
| 8 | 位置灯开关 | 输入 | 自锁开关 | GND | 10mA |
表1 转向灯相关输入信号
备注:
1.湿电流:英文原文为Wet Current,是指开关需要通过的,维持一定的电流清理开关触头表面的尘垢和腐蚀,以保持触头状态良好的电流的最小值称为湿润电流,这个电流对金属表面的氧化起阻止作用,防止开关失效,目前江淮定义除了雨刮归位开关是40mA,其它都是10mA。
2.关于碰撞信号请参见2.1.11碰撞信号一节。
转向灯和危险报警灯输出信号见表2:
| 序号 | 描述 | 输入/出 | 类型 | 有效值 | 额定驱动能力 |
| 1 | 左转向灯 | 输出 | 高边输出 | KL30 | 2*21W |
| 2 | 右转向灯 | 输出 | 高边输出 | KL30 | 2*21W |
| 3 | 左转向指示灯 | 输出 | CAN信号 | DirIndicationLeft | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
| 4 | 右转向指示灯 | 输出 | CAN信号 | DirIndicationRight | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
| 5 | 左转向灯开关状态 | 输出 | CAN信号 | LeftTurnSwitch | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
| 6 | 右转向灯开关状态 | 输出 | CAN信号 | RightTurnSwitch | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
| 7 | 危险报警开关指示灯 | 输出 | 高边输出 | KL30 | 1.2W,LED |
表2 转向灯相关输出信
功能概述:
- 钥匙处于点火开关ON档时,转向开关接通或断开则相应的转向灯闪烁或关闭,并同时触发仪表板上的转向指示灯以相同频率闪烁或关闭指示灯;
- 转向灯开关拨到左或右时,BCM驱动相应转向灯至少激活闪烁3次
- 如果当转向灯在激活后被关闭,那么转向灯将在完成其起初的最小3次闪烁周期后立即关闭。
- 如果左转向灯在被激活后将转向灯开关从左拨到右,那么左侧转向灯将立即关闭,右侧转向灯立即打开。
- 如果右转向灯在被激活后将转向灯开关从右拨到左,那么右侧转向灯将立即关闭,左侧转向灯立即打开。
- 危险警报灯包括所有的转向灯,钥匙在任意档位时都能驱动这些转向灯发出警报。危险报警灯开关为自锁开关。
7) 点火锁开关在ON时,转向灯和警示灯工作优先级为后操作优先,具体说明如下:如果转向灯在工作状态,打开报警灯开关,那么报警灯工作取代转向灯的工作,直到报警灯开关被关闭,系统才回到转向灯工作状态;如果报警灯在工作状态,将转向灯拨到左或右,那么转向灯工作取代报警灯的工作,直到转向灯输出关闭或者点火状态从ON变为OFF,系统才回到报警灯工作状态。
8) 如果接收到碰撞信号,那么所有的灯工作在报警灯状态下至少5秒钟,5秒钟后再次按下报警灯开关,将能关掉报警灯闪烁,这样为了防止由于碰撞而使报警灯开关被按下,如未按下危险报警灯开关,当检测到点火开关由ON-OFF-ON;碰撞解除,警示灯恢复正常工作。
9) 当转向灯由于对地短路或者过载而上报故障时,短路状态将通过相关DTC记录到memory中,并且立即关断该侧转向灯高边驱动芯片,组合仪表上转向指示灯也停止,如果在本次点火循环过程中转向灯再次被开启也不执行对应操作,必须重新启动一次点火循环,输出才能恢复正常。
10) 当工作于转向灯工作模式时,某侧转向灯由于开路或者对电源短路而上报故障时,开路状态将通过相关DTC记录到memory中,并且该侧转向灯以双倍频率(170±20次/min)闪烁,组合仪表转向指示灯也以双倍频率闪烁。当点火钥匙从ON转到OFF/ACC,再从OFF/ACC到ON,输出恢复正常,或者在本次点火循环中,当开路故障排除时也可以恢复正常频率闪烁。
注:在危险报警灯工作状态,检测到转向灯故障时,闪烁频率不改变。
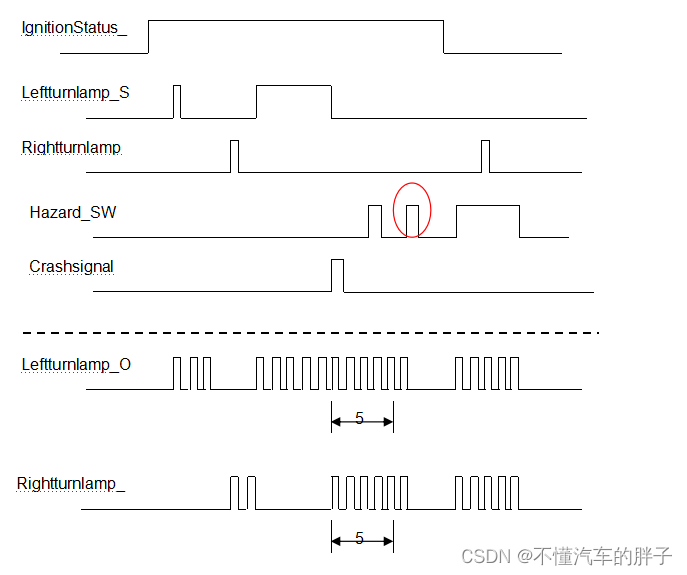
图4 左右转向灯/危险警报灯时序图
注:标红色部分为碰撞信号发生后超过5S才能关闭报警灯信号。
近光灯输入信号见下表3。
| 序号 | 描述 | 输入/出 | 类型 | 有效值(接通时) | 湿电流 |
| 1 | ACC | 输入 | 自锁开关 | KL30 | 10mA |
| 2 | IG1 | 输入 | 自锁开关 | KL30 | 10mA |
| 3 | IG2 | 输入 | 自锁开关 | KL30 | 10mA |
| 4 | 近光灯开关 | 输入 | 自锁开关 | KL31 | 10mA |
| 5 | 大灯开关 | 输入 | 自锁开关 | KL31 | |
| 6 | 远光灯开关 | 输入 | 自锁信号 | KL31 |
表3 近光灯输入信号
近光灯输出信号如表4所示。
| 序号 | 描述 | 输入/出 | 类型 | 有效值 | 额定驱动能力 |
| 1 | 近光灯输出 | 输出 | 低边驱动 | KL31 | 180mA |
| 2 | 近光灯指示信号 | 输出 | CAN信号 | HeadLampLowBeamCtrl | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
表4 近光灯输出信号
前照近光灯开关机械结构为,当转到近光灯时,位置灯开关接通。
近光灯点亮条件为:
- 点火开关在ON时,当BCM检测到近光灯开关输入有效时近光灯亮。
- 近光灯开启时,点火开关从ON被转到START档位,屏蔽近光灯输出,等点火开关回到ON档时,重新打开近光灯输出。
- 点火状态OFF的时候,超车灯开关从 ON 到 OFF(即大灯开关无效,远光灯开关从ON 到 OFF)触发带我回家功能,一次点火循环就激活一次带我回家,下一次点火状态跳到OFF的时候重新使能带我回家功能,并持续点亮近光灯30S。
近光灯功能关闭条件:
- 条件1时点亮,当检测到相应的近光开关关闭则近光灯关闭。
- 当点火档位从ON档变为非ON档时,关闭近光灯输出
- 条件2时,时间到了关闭近光灯,或者点火状态变化到OFF以外也会关闭近光灯。
远光灯输入由表5所示,
| 序号 | 描述 | 输入/输出 | 类型 | 有效值(接通时) | 湿电流 |
| 1 | ACC | 输入 | 自锁开关 | KL30 | 10mA |
| 2 | IG1 | 输入 | 自锁开关 | KL30 | 10mA |
| 3 | IG2 | 输入 | 自锁开关 | KL30 | 10mA |
| 4 | 远光开关 | 输入 | 自锁开关 | KL31 | 10mA |
| 5 | 大灯开关 | 输入 | 自锁开关 | KL31 | 180mA |
表5 远光灯输入信号
| 序号 | 描述 | 输入/出 | 类型 | 有效值 | 额定驱动能力 |
| 1 | 远光灯输出 | 输出 | 低边驱动 | KL31 | 180mA |
| 2 | 远光灯指示信号 | 输出 | CAN | HeadLampHighBeamCtrl | 0x0: OFF 0x1: ON Initial Value:0x0 Default Value:0x0 Error Value NA |
表6 远光灯输出信号
远光灯功能描述如下:
- 当点火状态为ON,并且远光灯开关有效时,打开远光灯开关,远光灯点亮。
- 远光灯开关关闭,或点火状态不为ON,,远光灯熄灭。
- BCM通过开关状态判断远光灯的工作状态,当大灯开关有效,且远光灯开关有效时,为远光灯模式;当远光灯开关有效,大灯开关关闭时,工作在超车模式
- 当远光灯输出有效时,点火档位从ON档变为START档时,关闭远光灯输出,当从START档位重新回到ON档时,重新打开远光灯输出
其他详见《车身控制器BCM系统功能规范》
车身控制器BCM系统功能规范 https://download.csdn.net/download/ChrisKKC/85360507
https://download.csdn.net/download/ChrisKKC/85360507



















 635
635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











