






在 ARM64 上安装 Gazebo
仿真平台Gazebo不直接支持 ARM64 架构,需要我们手动编译安装。
1、安装必要的依赖项:
sudo apt-add-repository ppa:dartsim
sudo apt update
sudo apt install libdart-dev libdart-utils-dev libdart-external-ikfast-dev libsdformat9-dev libfreeimage-dev libprotoc-dev libprotobuf-dev protobuf-compiler freeglut3-dev libcurl4-openssl-dev libtinyxml-dev libtinyxml2-dev libtar-dev libtbb-dev libogre-1.9-dev libxml2-dev pkg-config qtbase5-dev libqwt-qt5-dev libltdl-dev libgts-dev libboost-thread-dev libboost-system-dev libboost-filesystem-dev libboost-program-options-dev libboost-regex-dev libboost-iostreams-dev libsimbody-dev libignition-common3-dev libignition-fuel-tools4-dev libignition-transport8-dev libignition-math6-dev libignition-msgs5-dev2、从 GitHub 克隆 Gazebo 源代码:
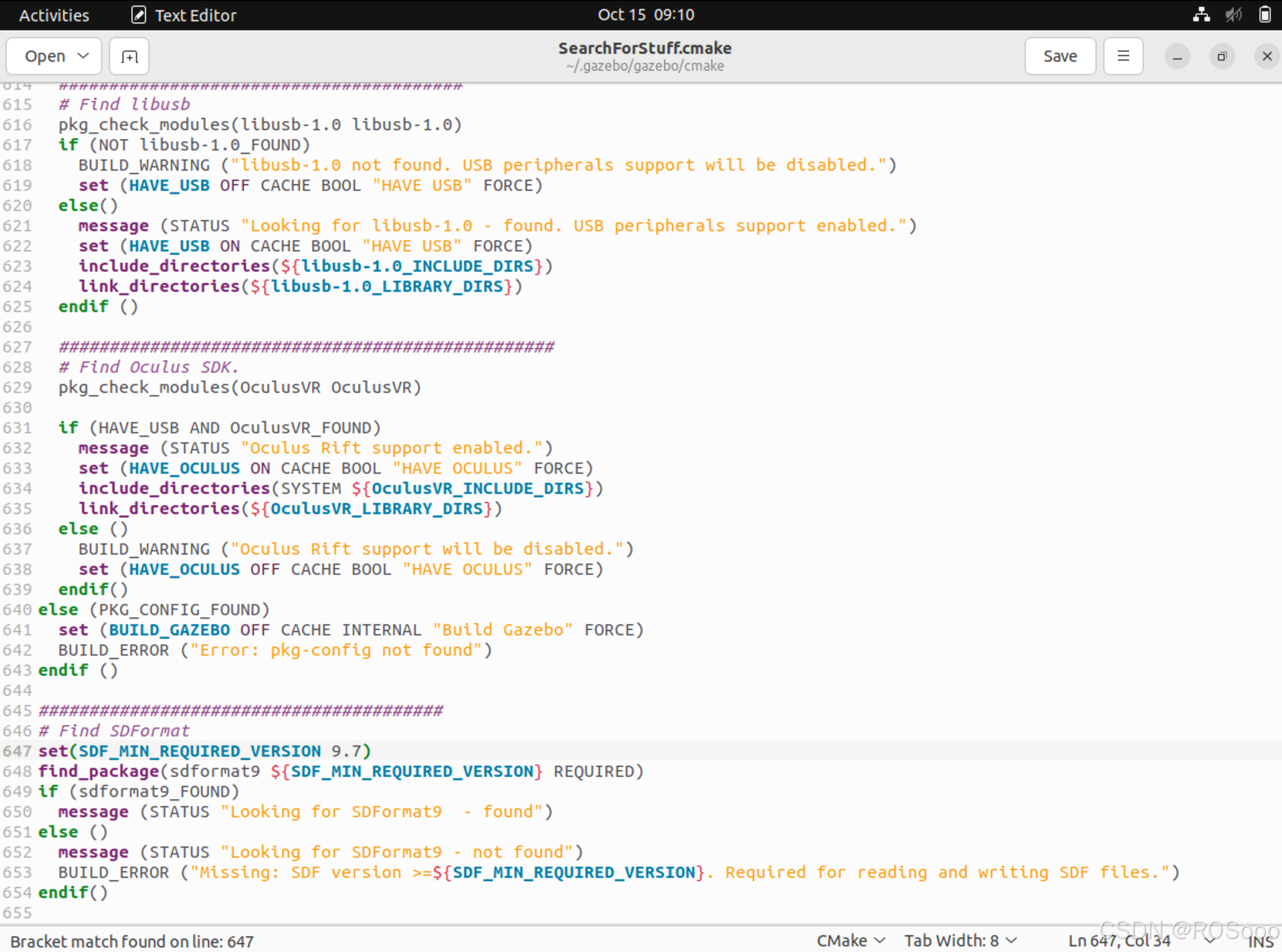
git clone https://github.com/osrf/gazebo3、修改SearchForStuff.cmake中line 647的。将默认的9.8改为9.7。
4、编译并安装Gazebo:
cd ~/.gazebo
mkdir build && cd build
cmake ../
make -j3
sudo make install5、通过修改.bashrc将Gazebo添加到您的环境路径:
export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH
export PATH=/usr/local/bin:$PATH
export PKG_CONFIG_PATH=/usr/local/lib/pkgconfig:$PKG_CONFIG_PATH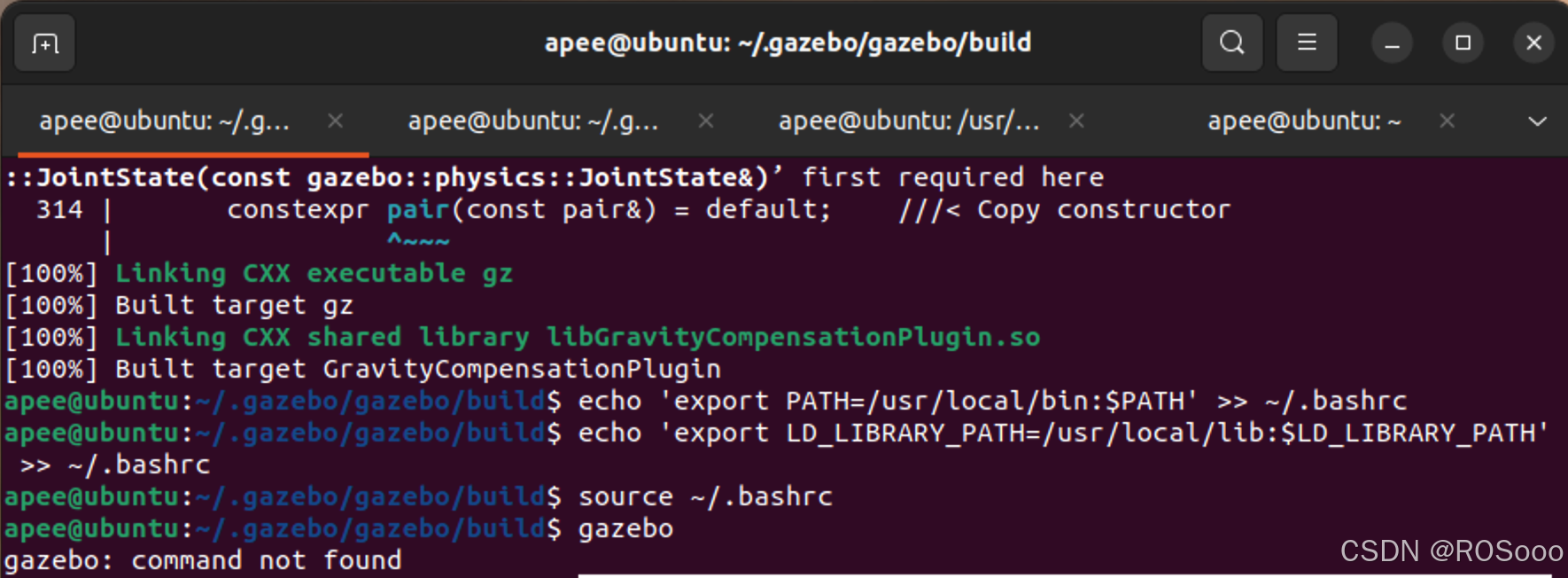
安装完之后,运行gazebo,如果显示不存在gazebo,再运行命令
sudo make install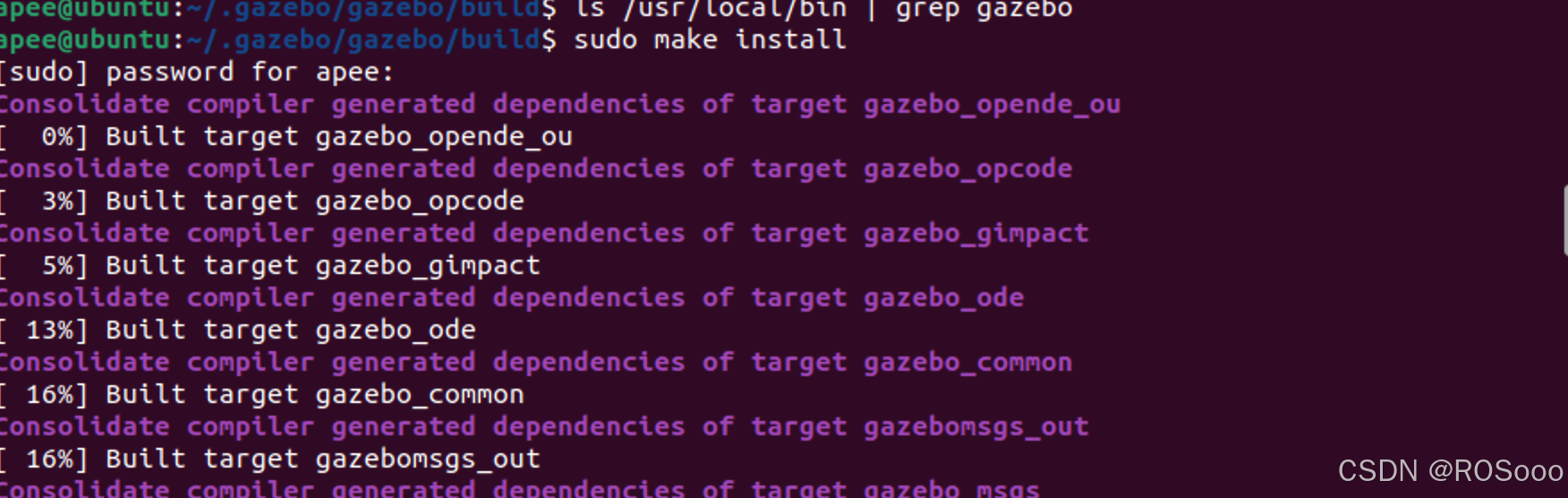
现在运行
gazebo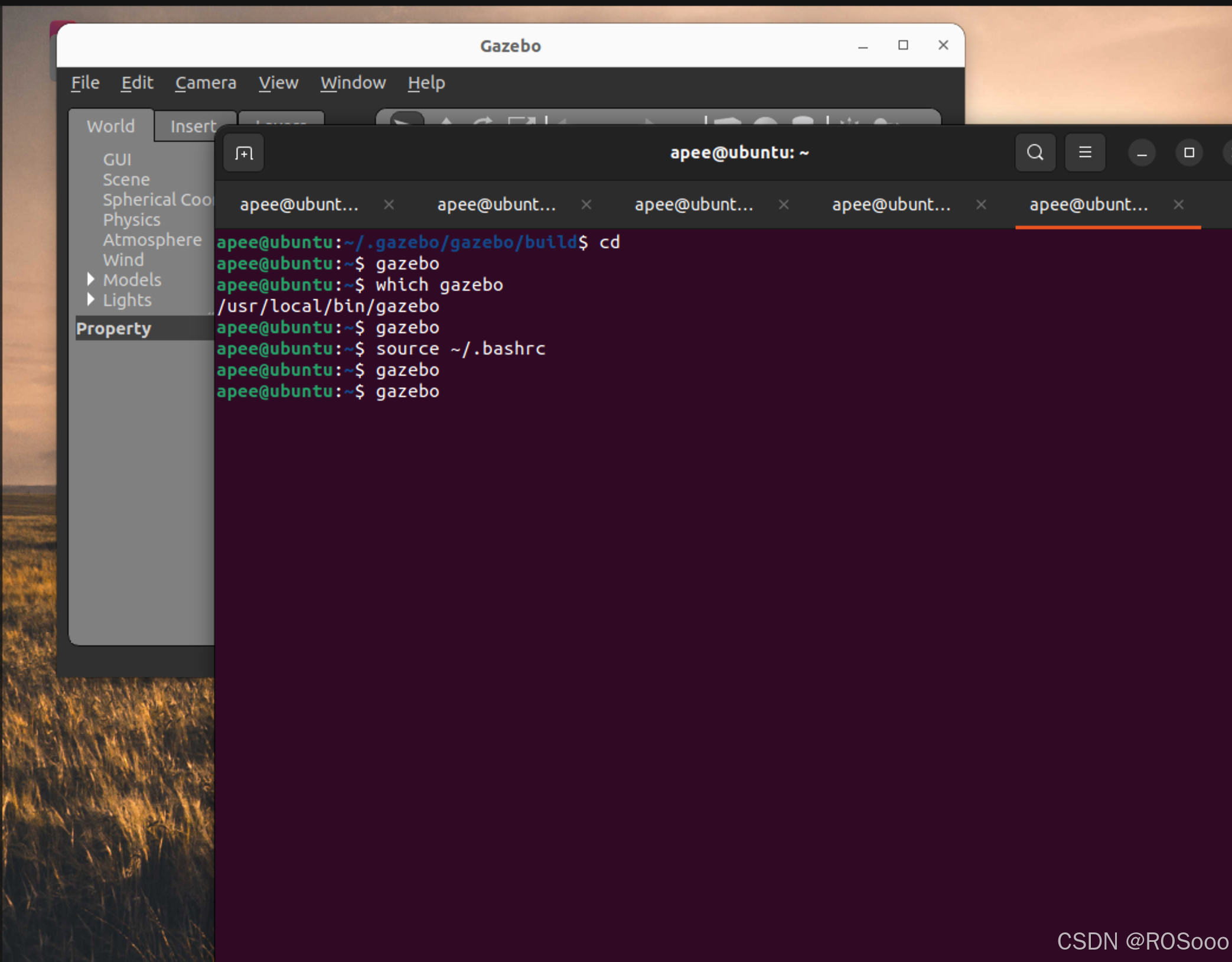
安装gazebo_ros_pkgs
1、克隆 gazebo_ros_pkgs
git clone https://github.com/ros-simulation/gazebo_ros_pkgs
cd gazebo_ros_pkgs
git checkout ros22、安装gazebo_ros_pkgs
cd ~/.gazebo_ros
export MAKEFLAGS="-j 3"
colcon build
开始编译安装,这个过程有点漫长,慢慢等待。。。

在bashrc中加入:
source ~/.gazebo_ros/install/setup.bash终端输入命令
source ~/.bashrc现在gazebo和gazebo_ros_pkgs已经安装好了
输入命令测试一下:
ros2 launch gazebo_ros gazebo.launch.py
至此,就可以在unbuntu22.04中使用ros和gazebo进行工作了!!!

















 841
841

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









