






自动驾驶对于车道线检测算法,可行驶区域识别开发,是基础研究内容。
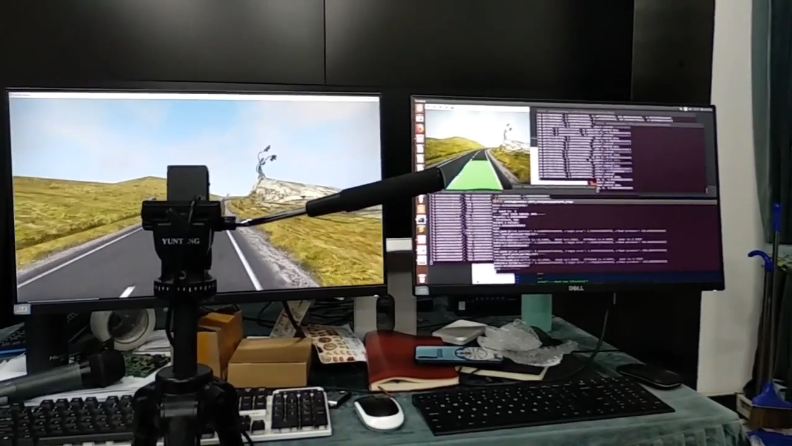
本实验,在仿真平台上,通过摄像头检测车道可行驶区域,实现车辆的自动控制功能。
ID:352000672532643487
自动驾驶创新工坊

自动驾驶技术在当今汽车行业中正变得越来越重要。其中,车道线检测算法和可行驶区域识别开发是该技术的基础研究内容。本实验旨在通过在仿真平台上使用摄像头检测车道可行驶区域,实现车辆的自动控制功能。
首先,车道线检测算法是自动驾驶技术中的重要组成部分。通过摄像头获取道路图像,并对图像进行处理和分析,我们可以提取出图像中的车道线信息。针对不同的道路环境和光照条件,我们需要设计和优化一种稳健的车道线检测算法,以确保在各种复杂道路情况下都能准确地识别出车道线。在本实验中,我们使用了一种基于图像处理和计算机视觉技术的车道线检测算法。该算法首先对图像进行预处理,包括图像去噪、灰度化和边缘检测等操作。然后,通过直线检测技术,我们可以从图像中提取出车道线的位置和方向信息。最后,将检测到的车道线信息与车辆的控制系统相结合,实现车辆的自动驾驶功能。
其次,可行驶区域识别开发也是自动驾驶技术中的关键任务之一。通过摄像头获取的道路图像,我们不仅能够检测出车道线,还可以分析车道线以外的区域,以判断哪些区域是可行驶区域。在本实验中,我们使用了一种基于图像分割和机器学习技术的可行驶区域识别方法。该方法首先利用图像分割算法将道路图像分为不同的区域,如车道线区域、路面区域和非路面区域等。然后,通过训练一个分类器,我们可以将这些区域分别标记为可行驶区域和不可行驶区域。最后,将识别出的可行驶区域信息传递给车辆的控制系统,实现车辆的自动驾驶功能。
在本实验中,我们使用仿真平台进行了车道线检测算法和可行驶区域识别开发的验证。仿真平台模拟了不同的道路环境和交通情况,我们可以通过摄像头获取道路图像,并实时进行车道线检测和可行驶区域识别。通过与实际道路情况的对比分析,我们可以评估和优化我们所设计的算法和方法的性能和鲁棒性。
总之,本实验在仿真平台上进行了自动驾驶技术中车道线检测算法和可行驶区域识别开发的研究。通过摄像头获取道路图像并进行图像处理和分析,我们可以实现车辆的自动控制功能。这些技术的研究和应用对于提高自动驾驶技术的安全性和可靠性具有重要意义。未来,我们将进一步完善和优化这些算法和方法,以满足日益增长的自动驾驶需求。
相关的代码,程序地址如下:http://wekup.cn/672532643487.html
















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









