






ARS548 雷达以太网通讯接口协议(对应固件版本为 5.48.4),雷达用户软件工程师
按文档解析雷达输出的 UDP 数据和生成雷达配置数据。
若雷达固件为稍早期的 5.48.1 版本,可以使用《ARS548_IO Stand 20.5.2022 1. Update - 通
信协议(适配固件版本为 v5.48.1)(上海渭成-20220709).xlsx》文档。5.48.4 版本固件相对 5.48. 1
在雷达状态消息内增加了状态消息时间戳、固件版本号、超压报警、超温报警、堵塞检测等信息,并
限制了雷达垂直安装高度参数范围为 0.01~10 米(该参数本就不应该支持 0,但 5.48.1 能配置该参
数为 0,会导致雷达不输出目标信息,不过将该参数修改为 0.01~10 米范围数值即可正常输出目标 信息)。
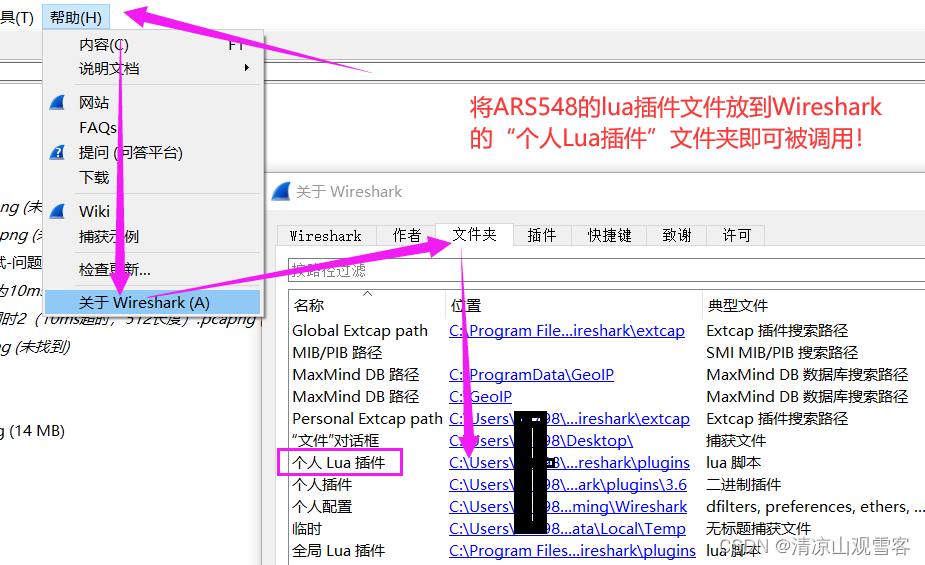
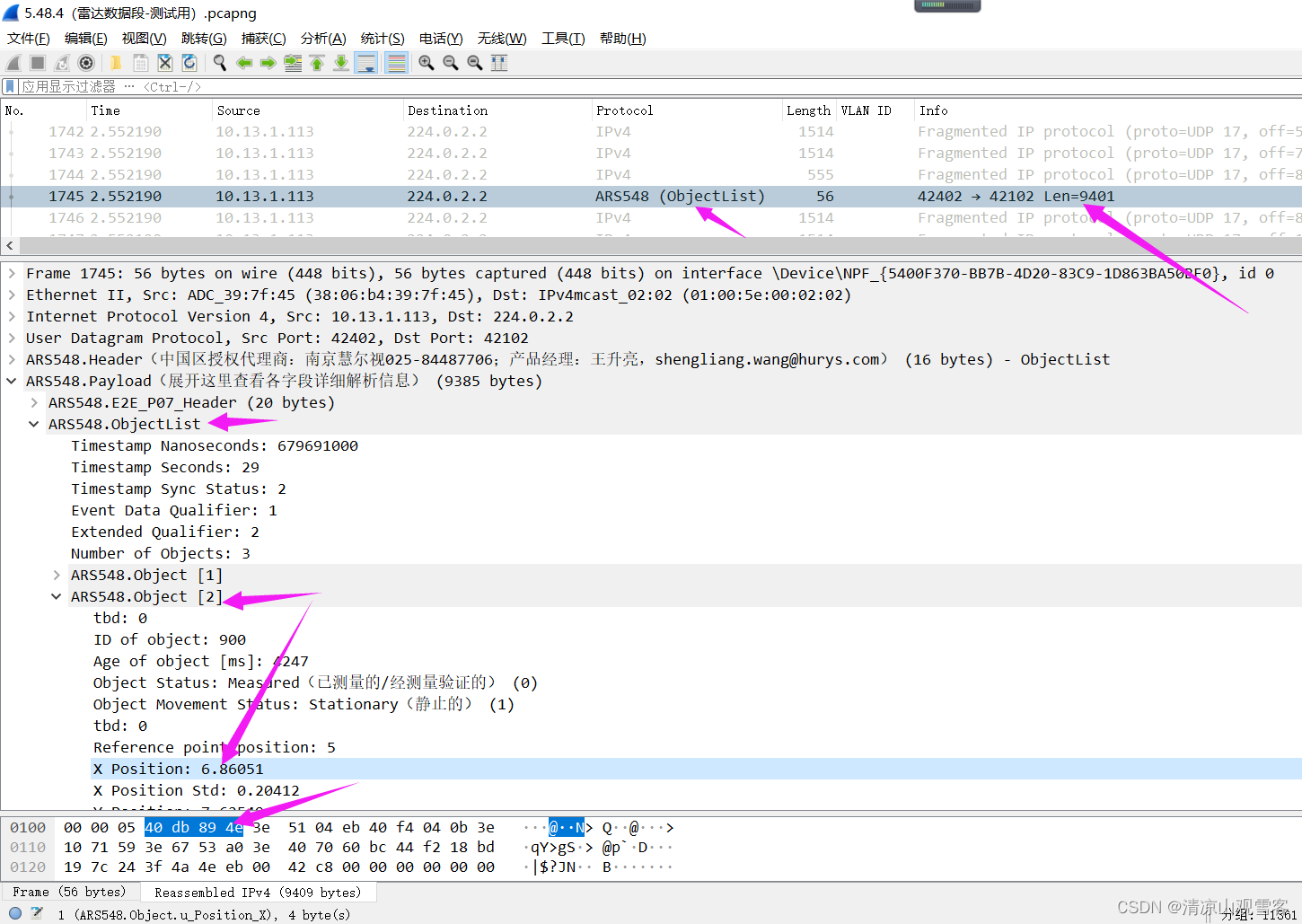
2.5、《 5.ARS548_v5.48.4_20220919.lua》
资料简介:.lua 格式文件为 Wireshark 开源抓包软件的插件,效果类似 CAN 通讯的 BDC 文件。
在 Wireshark 的“个人 Lua 插件”文件夹放置 5.ARS548_v5.48.4_20220919.lua 文件,Wireshark 就可以加载该插件实时解析 ARS548 雷达的数据。
2.5、《 5.ARS548_v5.48.4_20220919.lua》
资料简介:.lua 格式文件为 Wireshark 开源抓包软件的插件,效果类似 CAN 通讯的 BDC 文件。
在 Wireshark 的“个人 Lua 插件”文件夹放置 5.ARS548_v5.48.4_20220919.lua 文件,Wireshark 就可以加载该插件实时解析 ARS548 雷达的数据。
2.6、《 6.ARS548 雷达标准线束规格-WF.png》
资料简介:上海渭成为 ARS548 雷达用户配备的标准线束,通讯接口物理连接器选用的
DB9,引脚定义为 6P1N,用户端车载以太网线的 P 端与雷达接口 P 端对接、N 端与雷达接口 N 端 对接即可。
注意与用于 CAN 通讯时的 DB9 引脚定义不一样(DB9 连接器用于 CAN 通讯时,行业标准的
引脚定义为 7H2L)。 DB9 只是物理连接器,可以用于很多类型的通讯接口器件,包括 CAN 和 RS232。
本标准线束的 DB9 选用的是便于用户打开和拆装的压接免焊款,当用户测试环境没有对接连接 器时,可以随时拆卸该 DB9 连接器或将对接端裸线压接到该 DB9 连接器对应接口。
注意,以太网线不同于 CAN 总线,不能一对多分支接线,分支线过长就可能导致接收不到雷 达通讯数据。以太网数据想要一对多通讯,需要串接交换机。
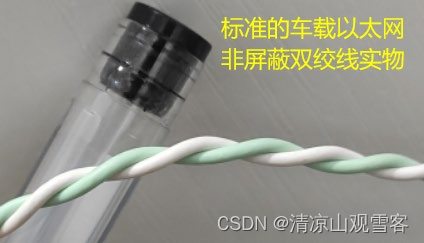
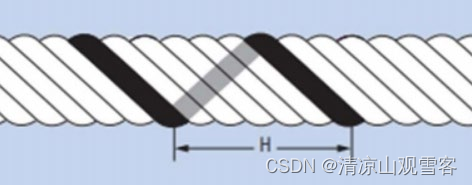
车载以太网线标准线束也是双绞线(绞合间距推荐为 H=13mm),其中非屏蔽双绞线最大通讯 距离为 15 米。且因接线、对接连接器等非双绞的区段要尽量的短。
德国大陆为 AR548 雷达配备的车载以太网线束用端子型号为泰科 TE 963727-1,推荐的车载 以太网线束金属线芯截面面积为 0.35mm2。
1. Introduction - Overview
1.1 Important information
This short description must be read thoroughly before the device is connected up or put into operation. Dangerous situations may arise otherwise.
This short description is a standard description of most important technical data of the 77 GHz Long Range Radar Sensors manufactured by ADC GmbH, referred to hereafter as the ARS 548 RDI.
Although plant and customer-specific deviations are possible, this documentation does not go into any further details.
All rights reserved by ADC GmbH. No part of this short description may be reproduced and / or processed, copied or distributed using electronic systems, in any form whatsoever, without the express written permission of ADC GmbH.
All due care was taken when preparing this short description. ADC GmbH shall assume no liability whatsoever for any mistakes or omissions.
ADC GmbH shall assume no liability for injury to persons or damage to property caused by failure to comply with this short description or through improper usage of the device. All warranty claims shall also become void.
Arbitrary reconstruction and/or modification of the device is not permitted for warranty, safety and CE approval-related reasons. In such cases, dangerous situations could arise and all guarantee claims shall become void.
In this description solely it is a matter to devices of generation 5 (G5).
We reserve the right to make technical modifications or to amend the delivery specifications.
Please contact your supplier if it should become necessary to check the technical functions or to repair the device.
Please retain the original packaging in order to protect the ARS 548 RDI against transport damage.
This document describes, in accordance with latest development status, the 77 GHz Long Range Radar Sensor ARS 548 RDI manufactured by ADC GmbH. The document does not claim to cover all the possible applications or deployment areas for these devices. It is amended, corrected and enhanced as approved editions in keeping with development progress. Ensuing new versions are assigned an incremental index number (as underlined in the example below):
Example: 2021_09_16-00 (00 = index number)
The contents of the latest released version are binding and make all preceding versions obsolete.
1.2 Introduction – Radar principle
The ARS 548 RDI is a premium model of the 5th generation of 77 GHz long range radar sensors
with new RF antenna arrays, which offer digital beam forming. ARS 548 RDI measures independently the distance, speed (Doppler’s principle) and angle of objects without reflector in one measurement cycle based on Pulse Compression with New Frequency Modulation. The improved range resolution is available in the complete FoV with a real time scanning frequency of 20 times per second. Simultaneous detection output of target distances up to 300 m, relative speed and angle for each target in azimuth and elevation with a high resolution are possible - with RDI (Radar Detection Interface).
1.3 Application examples
ARS 548 RDI is suitable for various industrial and automotive applications that are realized on beam-based sensor concepts.
Distance Monitoring/Warning
Distance monitoring with warning message if the distance to the preceding object is too close.
Detection and tracking of people, vehicles, animals and equipment for collision avoidance in industrial, construction, agricultural and mining applications
Monitoring of automated manufacturing processes
Condition monitoring of industrial plants
Traffic monitoring for traffic management and safety applications with ability to distinguish objects on different lanes
Smart cities as intelligent intersections, cross walks, intelligent lightning etc.
Monitoring and protection of vehicle and pedestrians on railway and restricted areas
Detection of targets in front of a preceding vehicle (by underbody reflections) even if the line of sight is covered.
Furthermore the scanning antenna of ARS 548 RDI allows measurement of object width and height and estimated length. Based on this functionality a classification of the measured targets is carried out.
3. Sensor Variants
ARS 548 RDI supports the following general configurations with
For details regarding the mechanical configuration of the sensor, see section
‘Housing’ of chapter ‘Interfaces’.
The micro-controller is selected based on the necessary computational power and further required resources.
4. System Overview
The ARS 548 RDI is a 77 GHz high performance premium long range radar sensor with digital beam-forming scanning antenna which enables highly automated driving in combination with other technologies.
The radar system provides the following features in general:
(is mostly only available for ARS 540 automotive radar)
Forward Collision Warning, Emergency Brake Assist:
Moving objects (0 … 250 km/h) speed reduction 60 km/h*
Stationary objects (0 … 80 km/h) speed reduction 40…50 km/h*
(*) these limitations apply only to radar-only architectures, i.e. without camera fusion
Compliant with:
UN/ECE R131 AEBS regulation [1]
Sensor designed for and Use Cases implemented for:
NHTSA Forward Collision Warning, Collision Imminent Braking
EuroNCAP 2018 AEB City / Inter Urban / VRU Pedestrian + Cyclist
EuroNCAP 2020 AEB City / Inter Urban / VRU Pedestrian + Cyclist & Junction Assist
EuroNCAP 2022 AEB City / Inter Urban / VRU Pedestrian + Cyclist + Powered two-wheeler & Junction Assist
Auto Alignment
Fast auto alignment capability for end of line production testing (EoL) Service alignment without special tools for service stations
Continuous alignment capability resp. misalignment detection during normal operation (e.g. load compensation)
Real elevation measurement feature
Capability to distinguish over-rideable and under-rideable objects from real target objects
Sensor fusion
Sensor designed (RAM, ROM, runtime) to host sensor fusion with other sensors (e.g. camera)
Object Interface and Radar Detection Image
Delivers list of detections within FOV with attributes like detection range, azimuth & elevation angle, probability, sensor position info, etc.
Capability to host safety relevant functions
Automotive Safety Integrity Level (ASIL) for safety relevant functions needs to be agreed
Outstanding interference robustness and advanced interference mitigation:
For general interference see section ‘Interference Robustness’
For interference from other radar sensors see section ‘Mutual Interference’
ARS 548 RDI complies with the applicable frequency regulation standards in the following key markets:
European Union
U.S.
Canada
Russia
South Korea
Australia
Japan
China
Homologation in further countries is available on request
Compliant with UN/ECE electromagnetic compatibility regulations R 10 [2] ECE R 10: E1 marking provided on customer request only
EN 301489 (CE sign) if sold onto the European market
CISPR-25 - Radio disturbance characteristics for the protection of receivers used onboard vehicles, boats, and on devices - Limits and methods of measurement
RoHS compliant
GADSL compliant
The ARS 548 RDI product is fully assembled in a plastic-aluminum housing and specially designed for civil automotive application. The use of encryption function is strictly controlled by the firmware made by Continental and the MCU is not removable. Therefore a classification regarding the chapters 3 and 5 of the dual use list from Europe Union and United States of America is ruled out. The final Classification Analysis of the product with the European Dual List, German Ausfuhrliste and the Commerce Control List (USA), is “not restricted” (European laws CE n° 428/2009,388/2012 and Bundesamt für Wirtschaft und Ausfuhrkontrolle) and “EAR99” (Export Administration Regulation).
4.1 Sensor Functions
ARS 548 RDI offers signals which can be used for functions like Emergency Brake Assist (EBA), Radar Detection Image (RDI) along with Object Interface (OI).
These functions are discussed in detail in this chapter.
4.1.1 Object Interface (OI)
Motivation:
OI is a generic processing step for all subsequent vehicle functions (EBA, ACC, etc.)
OI as a ‘stand-alone function’ provides object list output to software modules either allocated on the radar sensor or - via some communication bus - on an external ECU. It allows the customer to define/design the functional behavior of the vehicle functions by his own.
Description:
OI delivers list of objects to the front and rear of the vehicle.
Attributes include object dynamics, dimension, shape
Objects are classified as pedestrians, vehicles (passenger car, truck), motorbikes or bicyclists
Safety Integrity Level according to ISO-26262 is only available for ARS 540 automotive radar:
Depends on specific implementation of subsequent functions (EBA, ACC, etc.): supports functions up to ASIL B
The Object Interface delivers a list of up to 200 objects with the following data attributes:
Object ID
Distance (X, Y, Z)
Relative and Absolute Velocity (X,Y)
Relative and Absolute Acceleration (X,Y)
Width, Length, Heading
Radar Cross Section
Existence Probability
Object Age (in radar cycles)
Classification (Car, Truck, Bike, Pedestrian etc.)
Dynamic Property (moving, stationary)
Yaw rate
Further data attributes (e.g. road border probability, classification of animals, oncoming dynamic property etc.) can be ordered and paid separately with a modified software from the customer.
This list is intended as input to functions provided by Continental and also third party software modules (e.g. customer-furnished EBA function) which are integrated within the sensor’s software.
In order to be suitable e.g. for fusion with camera objects / camera information, the list of objects is not function specific.
The object list can also be output via the vehicle interface for use by external ECUs or sensors.
4.1.2 Radar Detection Image (RDI)
Motivation:
Continental’s RDI interface is intended for architectures with a central computing ECU. The radar sensor sends “tracked-multicycle base” azimuth & elevation hypothesis, which was then internally processed for object creation, to avoid wrong azimuth and elevation hypothesis output to bus interface.
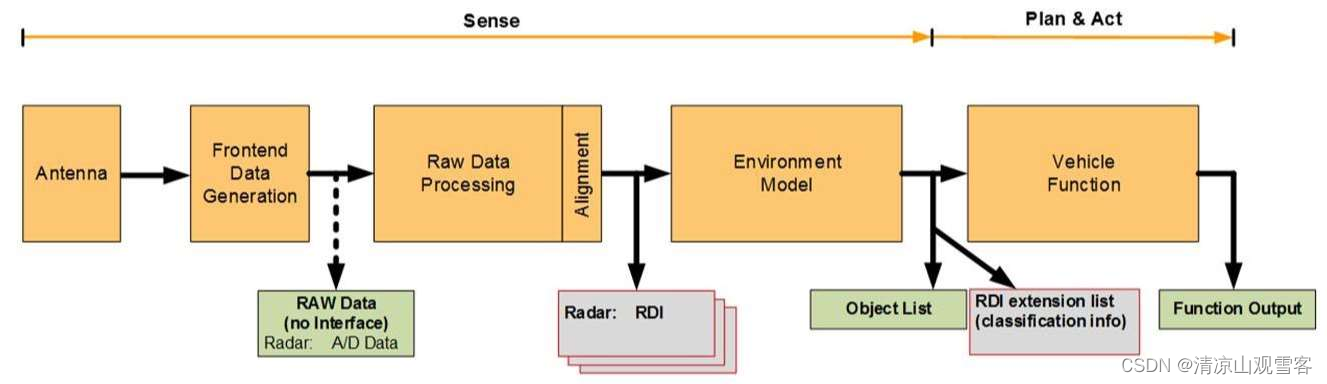
Figure 1: Radar Detection Image - Processing Chain
The RDI interface
enables early data fusion, including 360° radar view,
improves standardization of sensor architectures,
has no negative impact on classic functions like ACC, EBA, etc.,
allows flexible placement/interchange of short and long range sensors, can serve as input to computer vision algorithms.
Native-RDI works only with fast communication buses like Ethernet or LVDS because it typically requires 12 Mbps bandwidth.
RDI data contains 3D position (distance, azimuth, elevation), radar cross section, and Doppler speed. The RDI data is largely hardware independent (it is calibrated and aligned).
For the automotive version ARS 540 this RDI data is then fed into an environmental model (EM/CEM) running on an external ECU (e.g. ADCU or camera). RDI’s ‘near-raw’ data still contains radar artefacts and multiple reflections.
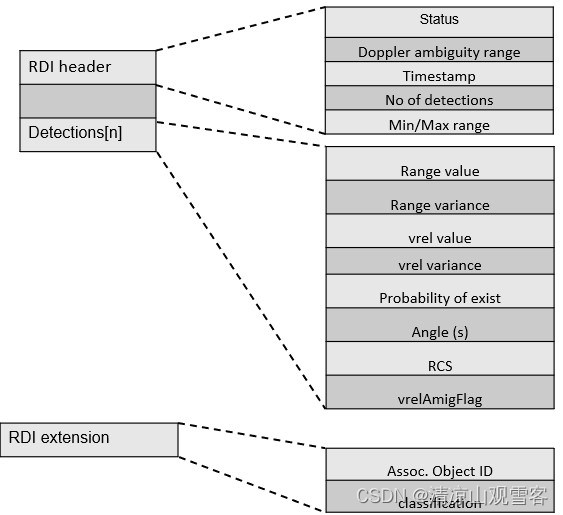
Figure 2: Radar Detection Image - Data Structure
Safety Integrity Level according to ISO-26262 is only available for ARS 540 automotive radar:
Depends on specific implementation of application: RDI covers ASIL B RDI data shall be provided via 100 Mbit ethernet.
4.2 Sensor Description
4.2.1 Radar Principle
As shown in Figure 20 the radar sensor family uses a pulse compression radar modulation scheme as basic principle for its measurements. This technique avoids the drawbacks of both the classical Pulse-Doppler and the FMCW (frequency modulated continuous wave) approach. Compared with a Pulse- Doppler principle, due to a very large duty cycle the chirped radar works with significantly higher amplitude of RF energy, resulting in a better overall SNR (signal to noise ratio).
Figure 3: Radar Principle
Compared to FMCW modulation, Continental’s pulse compression radar modulation makes it rather easy to separate range, velocity, and angular information in the received signals: ranges and Doppler speeds are calculated by a 2-dimensional fast Fourier transformation (2D-FFT), then the azimuth and elevation angles are determined by subsequent third and fourth FFTs.
As this procedure involves sampling out the individual chirps and processing accordingly, this radar principle is sometimes also referred to as pulse compression radar.
Another benefit of the radar principle is a software adjustable range resolution. The sensor is theoretically capable of setting its range resolution from 1 m and more up to 0.22 m (according to regulatory limits) which could be done internally based on certain traffic situation as well as parameters like vehicle speed, etc. This functionality is achieved by varying the frequency sweep of the chirps. The change can be done once for one single system cycle. 添加链接描述

















 392
392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









