







 本文详细介绍了毫米波雷达的工作原理,包括FMCW雷达的数据处理算法,以及单目标和多目标的距离、速度和角度估计。着重讨论了这些参数如何影响距离分辨率、速度分辨率,以及雷达的最大探测距离。同时,通过ARS5484D雷达的Python示例展示了实际应用中的数据解析和处理。
本文详细介绍了毫米波雷达的工作原理,包括FMCW雷达的数据处理算法,以及单目标和多目标的距离、速度和角度估计。着重讨论了这些参数如何影响距离分辨率、速度分辨率,以及雷达的最大探测距离。同时,通过ARS5484D雷达的Python示例展示了实际应用中的数据解析和处理。
毫米波雷达原理
1. 传统毫米波雷达
毫米波雷达的工作原理可以简单理解为:通过发射信号的接受信号之间的信息差,完成目标的测距和测速。另外受限与雷达的特性,速度分辨率和距离分辨率有对应的上限,也即可以区分的距离值和速度值有上限,比如可以区分出10m和15m距离的目标,但是10m和10.001m的两个目标无法分别。另外雷达也可以完成目标所在方位的估计,也就是角度估计,通过一系列计算完成目标方位角的计算(传统雷达而言,如果是4D毫米波雷达的话,应该还有俯仰角)。
1.1 雷达工作原理
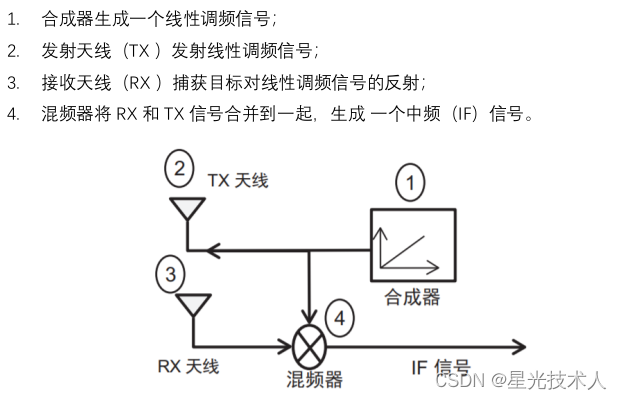
FMCW(Frequency Modulated Continuous Wave)雷达是一种常用于测距和速度的雷达系统。它的工作原理相对复杂,但可以简单描述如下:
- 频率调制: FMCW雷达通过周期性地调制发射信号的频率来工作。它的发射信号是一个频率连续变化的波形,通常是线性调频的信号。这意味着信号的频率随时间线性变化,比如从一个起始频率到一个结束频率,然后再从结束频率返回起始频率,形成一个周期。
- 发射与接收: FMCW雷达将这种调制的信号发送出去,然后等待信号被目标物体反射回来。目标物体反射回来的信号会包含与目标物体的距离和速度相关的信息。
- 混频与解调: 接收到反射信号的雷达会将其与本地生成的发射信号进行混频。这个过程可以理解为将两个信号相乘,得到一个频率差信号,这个频率差信号包含了目标物体距离和速度的信息。
- 信号处理: 混频后得到的信号经过信号处理,通常是通过FFT(快速傅里叶变换)或其他频域分析技术来提取出目标物体的距离和速度信息。通过分析混频信号的频率分量,可以确定目标物体的距离(基于延迟时间)和速度(基于频率变化)。
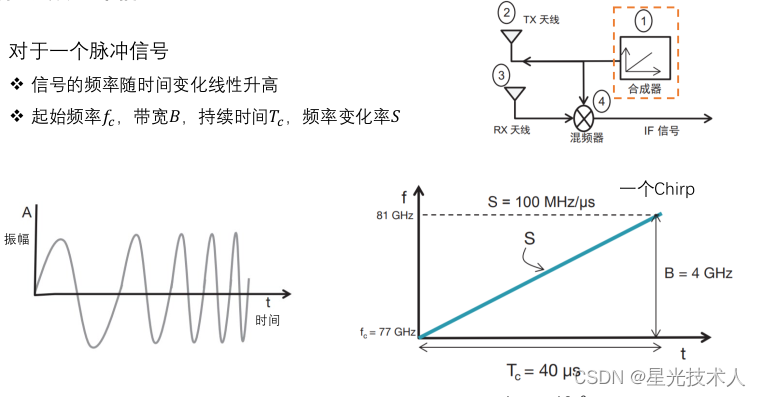
从上图右下角的图可以看出,该款雷达的起始频率为 77 G H z 77GHz 77GHz,最大频率为 81 G H z 81GHz 81GHz,带宽为 B = 4 G H z B = 4GHz B=4GHz,一个频率变化时间周期为 T c = 40 μ s T_c = 40\mu s Tc=40μs,频率变化率为 S = B / T c = 100 M H z / μ s S = B/T_c = 100MHz/ \mu s S=B/Tc=100MHz/μ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2474
2474

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











