







# Apollo开发者社区 #
《Robbie带你入门自动驾驶》免费课程→传送门

自动驾驶感知技术是自动驾驶系统中的重要组成部分,它负责从环境中获取信息,为车辆的决策和控制提供关键的数据支持。自动驾驶“感知”系列,将基于百度Apollo自动驾驶平台,介绍自动驾驶感知的原理、技术以及在实践中的应用,旨在帮助读者深入了解自动驾驶感知领域的发展现状和未来趋势。
一、找到云实验
打开Apollo平台,打开云实验界面,找到云实验“Apollo感知之数据结构解析”

二、开始云实验
点击“开始实验”,进入云实验界面。在实验开始前,建议大家先阅读并了解下本实验的的实验介绍和实验目的,以便于我们更加明确实验对象、实验目的。
实验介绍:在感知模块里,不同的传感器各有各的优缺点,而 Apollo 感知模块则是把各个传感器的优点结合起来,在目标级别上进行融合。本实验通过播放感知数据包,利用Cyber调试工具查看和分析感知模块的数据结构。
实验目的:
熟悉相机和激光雷达的原始数据
数据感知模块的数据结构
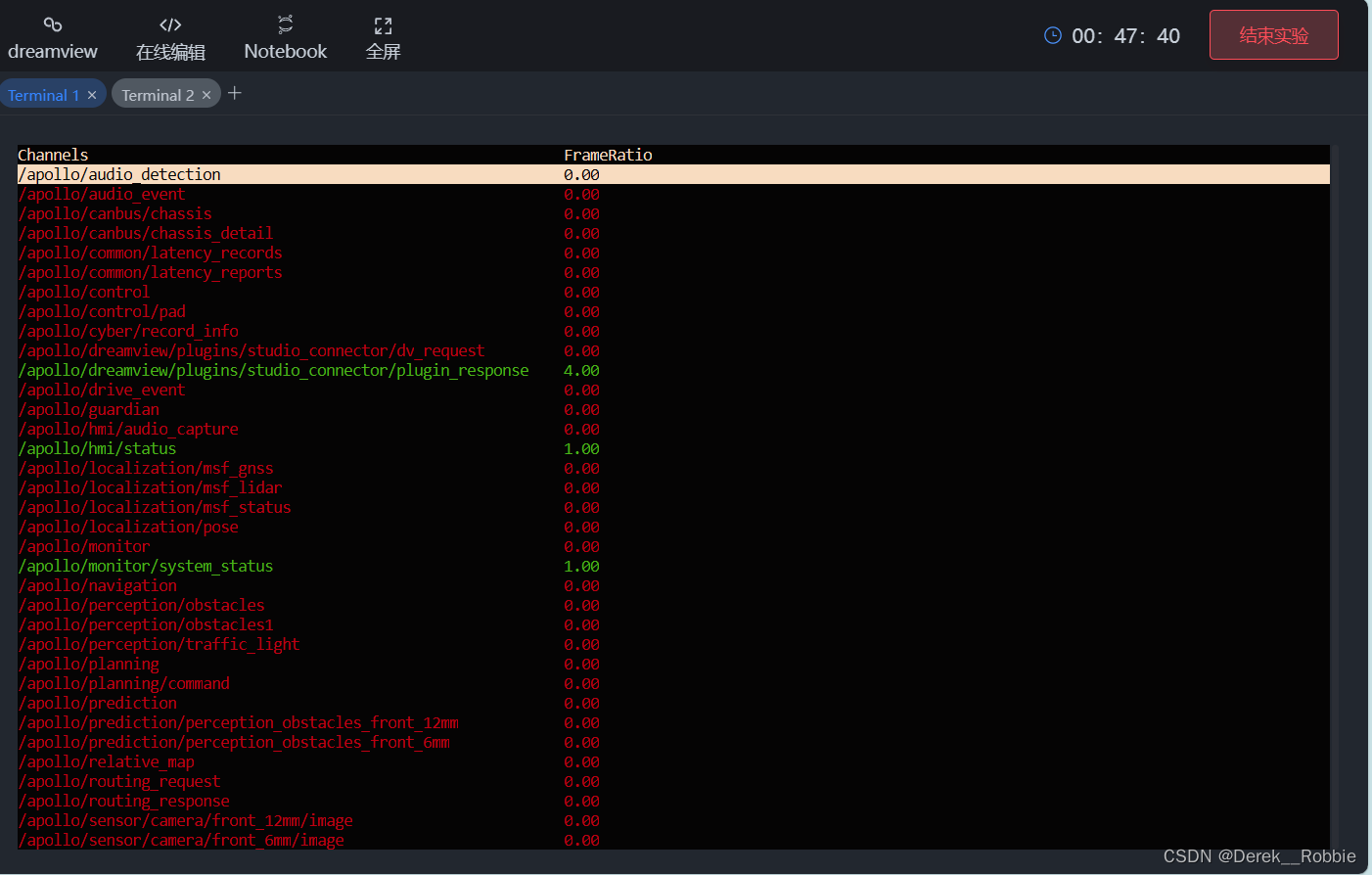
掌握Cyber_monitor的使用
三、依据实验步骤,进行实验
在本实验中,提供两种方法播放数据包
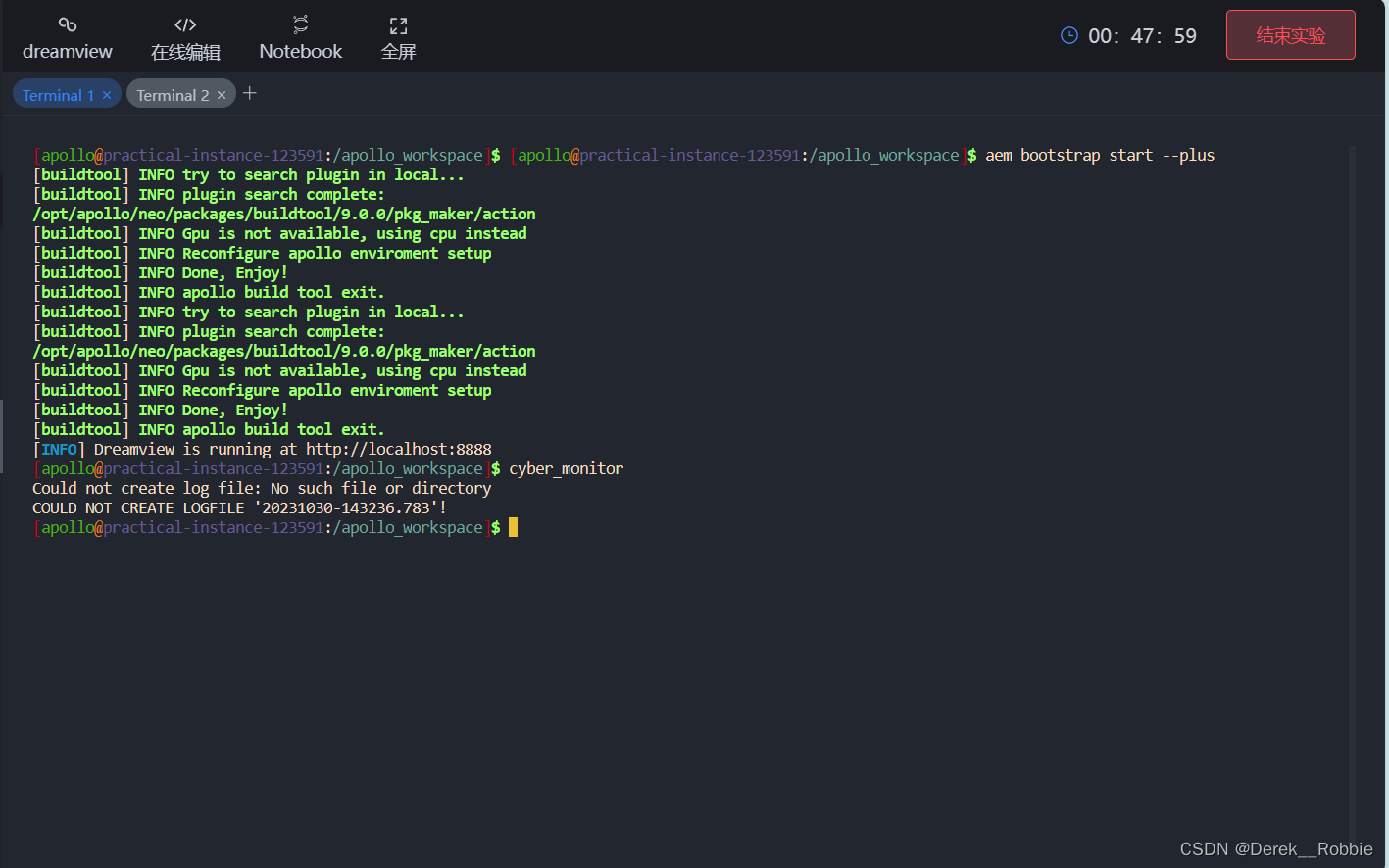
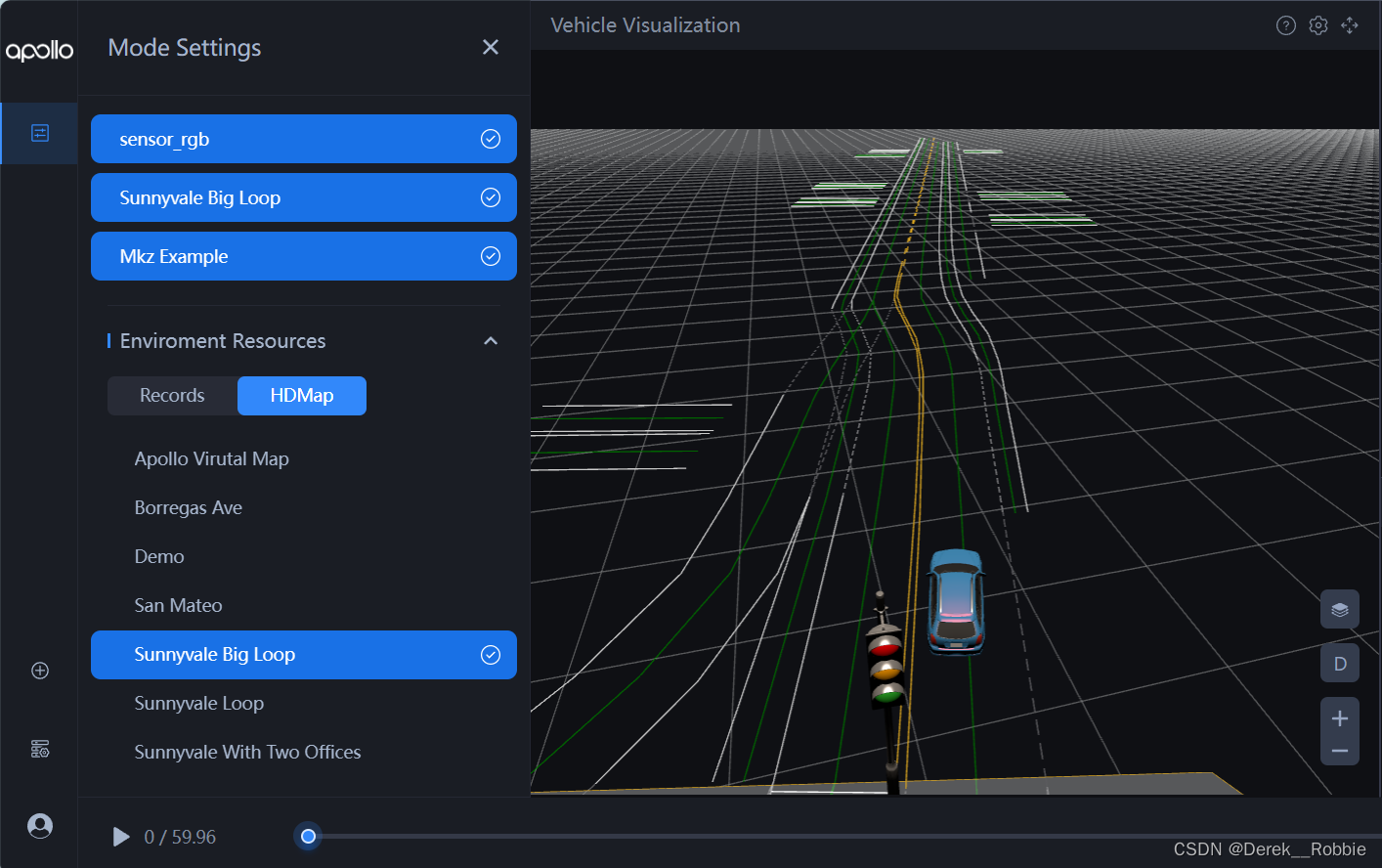
方法一:使用Dreamview播放数据包
方法二:使用命令行播放数据包
整体体验下来效果还是非常好的,途中可能出现解释的页面加载不出来,我们可以重新打开云实验,或者清楚一些后台内存,看看是否可以解决。如果还是不能解决,欢迎私信。

















 6318
6318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











