







 超级会员免费看
超级会员免费看
 本文深入解析了Apollo自动驾驶系统中的EM Planner算法,详细介绍了算法思想、流程和应用场景。EM Planner通过多车道策略和路径速度迭代处理动态和静态障碍物,确保安全性和驾驶体验。算法迭代优化路径和速度,结合动态规划与二次规划,解决复杂交通场景中的规划问题。文章还探讨了算法在高速公路和城市驾驶中的应用,并对比了轻决策与重决策算法的优缺点。
本文深入解析了Apollo自动驾驶系统中的EM Planner算法,详细介绍了算法思想、流程和应用场景。EM Planner通过多车道策略和路径速度迭代处理动态和静态障碍物,确保安全性和驾驶体验。算法迭代优化路径和速度,结合动态规划与二次规划,解决复杂交通场景中的规划问题。文章还探讨了算法在高速公路和城市驾驶中的应用,并对比了轻决策与重决策算法的优缺点。
文章目录
一、算法概述
1、Apollo框架简述
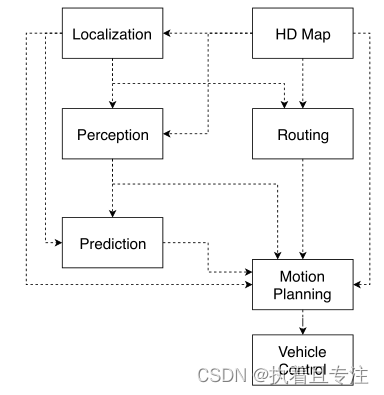
先来介绍下整体的Pipeline。Apollo开源自动驾驶平台中,高清地图模块提供了每个在线模块都可以访问的高清地图。感知和定位模块提供了必要的动态环境信息,可以在预测模块中进一步用于预测未来的环境状态。运动规划模块考虑所有信息,以生成安全平滑的轨迹,并将其输入车辆控制模块。
EM planner是基于百度Apollo(开源)的实时运动规划系统。旨在解决工业4级运动规划问题。该规划器以多车道、路径速度迭代、交通规则和决策组合设计的安全性和乘坐体验为目标。
2、Em planer算法概述
系统分层覆盖了多车道和单车道自动驾驶;(1)系统的顶层是一种多车道策略,通过比较并行计算的车道级轨迹来处理车道变换场景。 (2)在车道级轨迹生成器中,它基于Frenet框架迭代求解路径和速度优化问题.(3)对于路径和速度优化,将动态规划DP和基于样条曲线QP的

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 6584
6584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











