







单个相机只能获得一幅图像。实际意义是三维空间在二维空间上的一个投影。准确的说是变形的投影,因为相机投影关系和三维空间在二维基上最小二乘映射并不完全相同。那我是不是能设计一种可以映射的相机模型?
多视角几何的极线约束
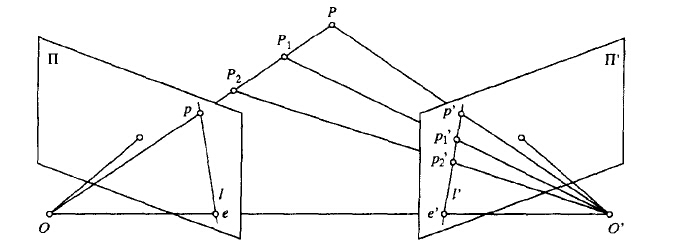
一个点总是在一个平面上,这个平面必然会过两个相机的光心,这就对点在两个相机中的关系又了一个约束。
1P=12T2P
式中1,2分别表示相机1和相机2的坐标系。T表示两个坐标系的变换矩阵
12T=(
单个相机只能获得一幅图像。实际意义是三维空间在二维空间上的一个投影。准确的说是变形的投影,因为相机投影关系和三维空间在二维基上最小二乘映射并不完全相同。那我是不是能设计一种可以映射的相机模型?
一个点总是在一个平面上,这个平面必然会过两个相机的光心,这就对点在两个相机中的关系又了一个约束。
 569
569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















