







51单片机实例
文章目录
前言
本节是基于51单片机下在智能小车(二)-------- 小车的红外遥控调速的基础上增加了红外循迹模块,但本节并无用到红外遥控模块,若想了解红遥控模块请前往智能小车(二)-------- 小车的红外遥控调速,如果小车的硬件连接有问题,请前往智能小车(一)--------小车的前进、后退和停止,接下来我就开始红外循迹模块的介绍了。
一、红外循迹模块的介绍

1. 模块描述
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接 收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避 障小车、流水线计数及黑白线循迹等众多场合。
2. 模块参数说明
(1) 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
(2) 传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
(3) 传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO
(4) 比较器采用LM393,工作稳定;
(5) 可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;
(6) 具有3mm的螺丝孔,便于固定、安装;
(7) 电路板尺寸:3.2CM*1.4CM
3. 模块接口说明
(1) VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
(2) GND 外接GND
(3) OUT 小板数字量输出接口(0和1)
4. 模块用途
(1) 电度表脉冲数据采样
(2) 传真机碎纸机纸张检测
(3) 障碍检测
(4) 黑白线检测
5. 模块介绍
(1) 采用TCRT5000红外反射传感器
(2) 检测反射距离:1mm~25mm适用
(3) 比较器输出,信号干净,波形好,驱动能力强,超过15mA。
(4) 配电位器调节灵敏度
(5) 工作电压3.3V-5V
(6) 输出形式 :数字开关量输出(0和1)
(7) 设有固定螺栓孔,方便安装
(8) 小板PCB尺寸:3.2cm x 1.4cm
(9) 使用宽电压LM393比较器
6. 功能介绍
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
7. 电路原理图
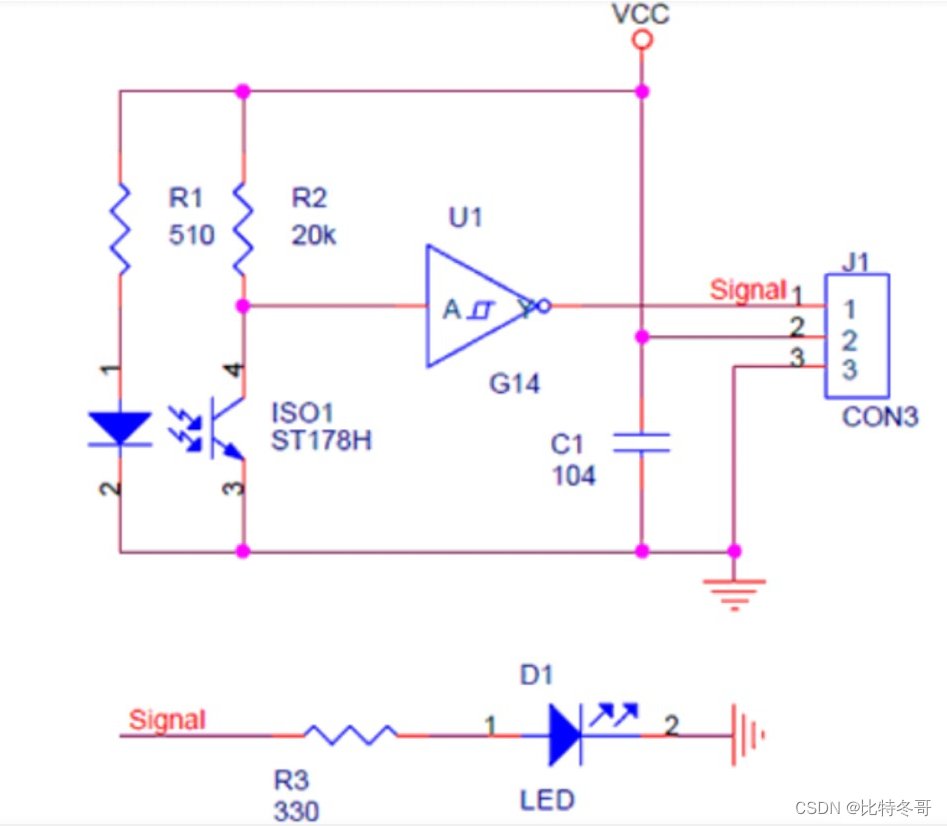
传感器的红外发射二极管(1-2处)不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管(3-4)一直处于关断状态,此时模块输出端(引脚1)为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
二、硬件连接
具体硬件连接请前往智能小车(一)--------小车的前进、后退和停止
相关驱动模块请前往智能小车(二)-------- 小车的红外遥控调速
三、代码实现
1. 引脚定义、函数声明模块
#include <reg52.h>
typedef unsigned int u16;
typedef unsigned char u8;
u8 PWML=0,PWMR=0,t=0; //定义PWM 占空比
u16 DE=0; //判断路线是否比较曲折
sbit ENAL=P1^1; //定义L298N的使能口
sbit ENBR=P1^0;
sbit IN1=P0^6; //定义L298N的选择口
sbit IN2=P0^5;
sbit IN3=P0^4;
sbit IN4=P0^3;
sbit IRN1=P0^0; //右 //定义红外循迹模块的端口
sbit IRN2=P0^1;
sbit IRN3=P0^2; //左
sbit IRN4=P2^0;
void Timer0_Init();
void Turn();
void Driv_Go();
void Driv_Stop();
void Driv_Back();
void Driv_Left();
void Driv_Right();
void Driv_Left_OPP();
void Driv_Right_OPP();
void RightMotoForward();
void RightMotoBack();
void LeftMotoBack();
void LeftMotoForward();
void RightMotoStop();
void LeftMotoStop();
void Delay(u8 i);
2. 延迟模块
void Delay(u8 i)
{
while(i--);
}
3. 定时器模块
void Timer0_Init() //设置定时器0
{ //通过设置定时器0来调制小车的转速
TMOD|=0x01; //选择16位的定时器
TH0=(65536-100)/256;
TL0=(65536-100)%256;
ET0=1; //开放定时器中断0
TR0=1;
EA=1;
}
void Timer0Init() interrupt 1 //中断 进入占空比的调节
{
TH0=(65536-100)/256;
TL0=(65536-100)%256;
t++;
if(t<PWML)
{
ENAL=1;
}
else
{ENAL=0;}
if(t<PWMR)
{
ENBR=1;
}
else
{ENBR=0;}
if(t>=100)
t=0;
}
4. 小车转向模块
void Turn()
{
/
if(DE==0) //判断路线较为平缓
{
if(IRN1==0&&IRN2==0&&IRN3==0&&IRN4==0) //启动循迹前不要挡住小车的四个红外检测灯
{
PWML=20; //L298N同时控制两个电机时,电机转速不同
PWMR=19; //通过软件来调节,尽可能减小误差
Driv_Back();
}
///
if(IRN2==0&&IRN3==1) //小车左转
{
Delay(100);
if(IRN2==0&&IRN3==1)
{
PWML=7;
PWMR=25;
Driv_Go();
}
}
///
// if(IRN1==0&&IRN2==0&&IRN3==0&&IRN4==1) //小车左转(大幅度)
// {
// Delay(1000);
// if(IRN2==0&&IRN3==1)
// PWML=7;
// PWMR=25;
// Driv_Go();
// }
///
if(IRN2==1&&IRN3==0) //小车右转
{
Delay(100);
if(IRN2==1&&IRN3==0)
{
PWML=25;
PWMR=5;
Driv_Go();
}
}
///
// if(IRN1==1&&IRN2==0&&IRN3==0&&IRN4==0) //小车右转(大幅度)
// {
// Driv_Stop();
if(IRN2==1&&IRN3==0)
Delay(1000);
// PWML=25;
// PWMR=5;
// Driv_Go();
// }
///
if(IRN2==1&&IRN3==1) //小车直走 接收到信号就是0
{
Delay(100);
if(IRN2==1&&IRN3==1)
{
PWML=20;
PWMR=19;
Driv_Go();
}
}
}
else
{
if(IRN1==0&&IRN2==0&&IRN3==0&&IRN4==0)
{
PWML=20;
PWMR=19; //小车停止
Driv_Back();
Delay(10000); //延时一下
Driv_Stop();
DE=1;
}
///
if(IRN2==0&&IRN3==1) //小车左转(左轮后转 右轮正转 产生速差)
{
Delay(100);
if(IRN2==0&&IRN3==1)
Driv_Left_OPP();
}
///
if(IRN2==1&&IRN3==0) //小车右转(左轮正转 右轮后转)
{
Driv_Stop();
if(IRN2==1&&IRN3==0)
Driv_Right_OPP();
}
///
if(IRN2==1&&IRN3==1) //小车直走
{
Delay(100);
if(IRN2==1&&IRN3==1)
{
PWML=20;
PWMR=19;
Driv_Go();
}
}
DE=0;
}
}
void Driv_Go()
{RightMotoForward();LeftMotoForward();}
void Driv_Back()
{RightMotoBack();LeftMotoBack();}
void Driv_Right()
{RightMotoStop();LeftMotoForward();}
void Driv_Left_OPP()
{RightMotoForward();LeftMotoBack();}
void Driv_Right_OPP()
{RightMotoBack();LeftMotoForward();}
void Driv_Left()
{LeftMotoBack();RightMotoForward();}
void Driv_Stop()
{RightMotoStop();LeftMotoStop();}
void RightMotoForward()
{IN3=1; IN4=0;}
void RightMotoBack()
{IN3=0; IN4=1;}
void LeftMotoBack()
{IN1=1; IN2=0;}
void LeftMotoForward()
{IN1=0; IN2=1;}
void RightMotoStop()
{IN3=1; IN4=1;}
void LeftMotoStop()
{IN1=1; IN2=1;}
5. 主函数模块
void main()
{
Timer0_Init();
EA=1;
while(1)
{
Turn();
}
}
总结
本节是以STC89C52单片机为CPU,通过一些外围电路和软件编程实现小车红外循迹的功能。整个设计过程中最大的特点是利用简单的理论原理将红外循迹模块、L298N驱动模块、51单片机这三个模块有效的结合起来,利用红外循迹原理与pwm调节占空比的简单结合实现对小车红外循迹奠定编程理论基础,提高了效率,降低了编程的复杂度,具有很强的研究的意义,智能化的发展促使了智能小车往功能更加强大的方向发展。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











